Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction
Paper and Code
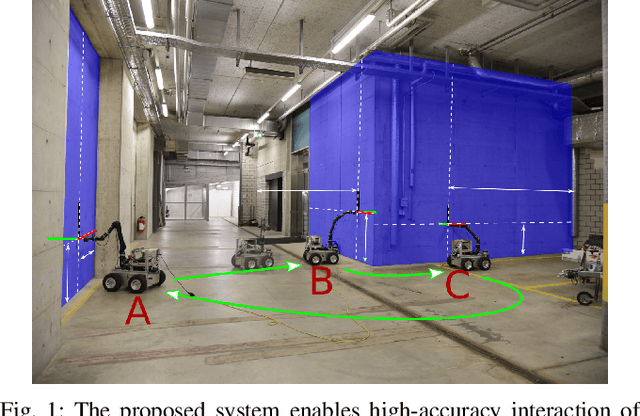
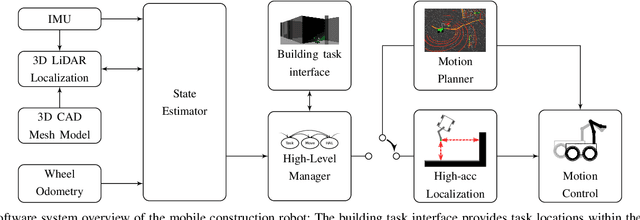
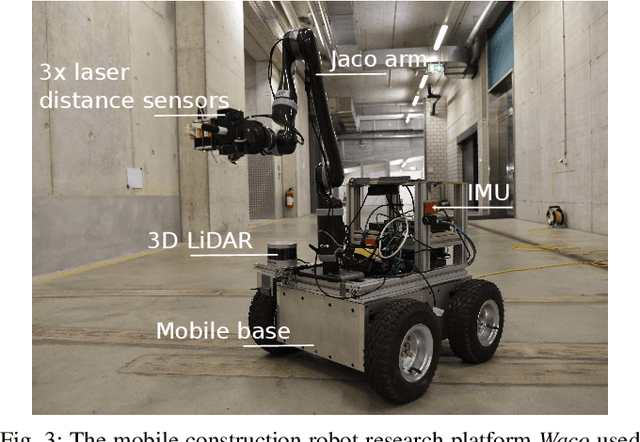
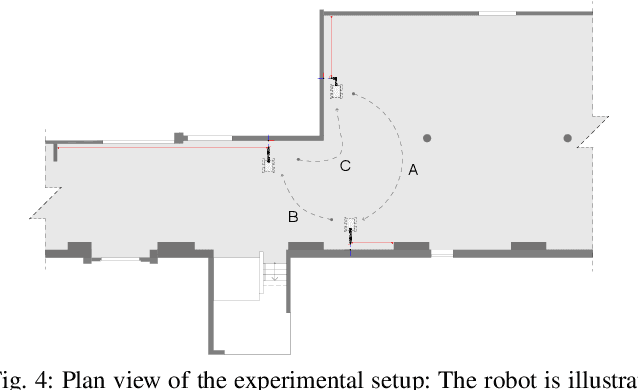
We present a fully-integrated sensing and control system which enables mobile manipulator robots to execute building tasks with millimeter-scale accuracy on building construction sites. The approach leverages multi-modal sensing capabilities for state estimation, tight integration with digital building models, and integrated trajectory planning and whole-body motion control. A novel method for high-accuracy localization updates relative to the known building structure is proposed. The approach is implemented on a real platform and tested under realistic construction conditions. We show that the system can achieve sub-cm end-effector positioning accuracy during fully autonomous operation using solely on-board sensing.
View paper on