 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Motion Planning for a Reconfigurable Robotic Base
Jul 04, 2022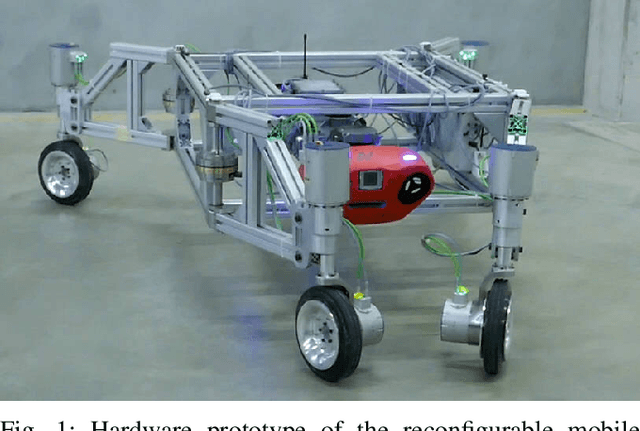
A robotic platform for mobile manipulation needs to satisfy two contradicting requirements for many real-world applications: A compact base is required to navigate through cluttered indoor environments, while the support needs to be large enough to prevent tumbling or tip over, especially during fast manipulation operations with heavy payloads or forceful interaction with the environment. This paper proposes a novel robot design that fulfills both requirements through a versatile footprint. It can reconfigure its footprint to a narrow configuration when navigating through tight spaces and to a wide stance when manipulating heavy objects. Furthermore, its triangular configuration allows for high-precision tasks on uneven ground by preventing support switches. A model predictive control strategy is presented that unifies planning and control for simultaneous navigation, reconfiguration, and manipulation. It converts task-space goals into whole-body motion plans for the new robot. The proposed design has been tested extensively with a hardware prototype. The footprint reconfiguration allows to almost completely remove manipulation-induced vibrations. The control strategy proves effective in both lab experiment and during a real-world construction task.
Deep Measurement Updates for Bayes Filters
Dec 01, 2021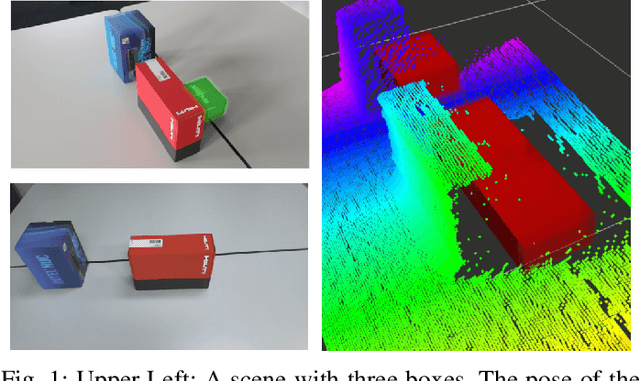
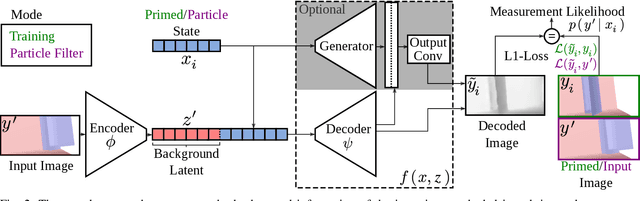
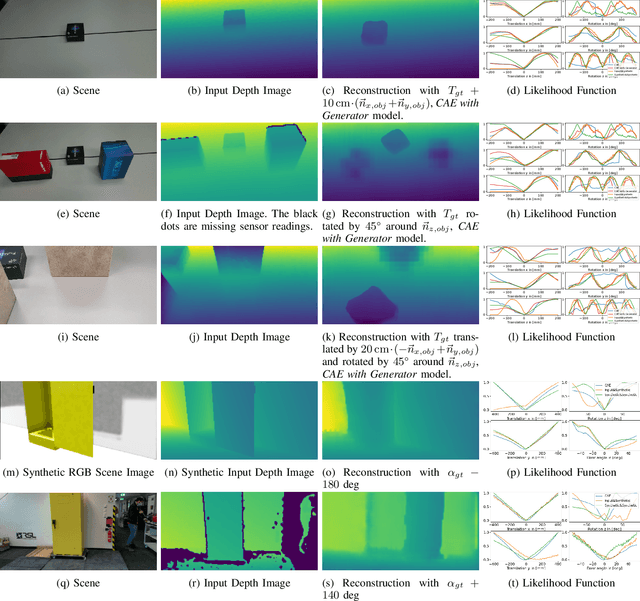
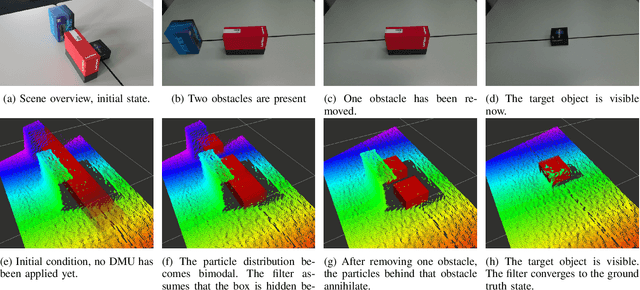
Measurement update rules for Bayes filters often contain hand-crafted heuristics to compute observation probabilities for high-dimensional sensor data, like images. In this work, we propose the novel approach Deep Measurement Update (DMU) as a general update rule for a wide range of systems. DMU has a conditional encoder-decoder neural network structure to process depth images as raw inputs. Even though the network is trained only on synthetic data, the model shows good performance at evaluation time on real-world data. With our proposed training scheme primed data training , we demonstrate how the DMU models can be trained efficiently to be sensitive to condition variables without having to rely on a stochastic information bottleneck. We validate the proposed methods in multiple scenarios of increasing complexity, beginning with the pose estimation of a single object to the joint estimation of the pose and the internal state of an articulated system. Moreover, we provide a benchmark against Articulated Signed Distance Functions(A-SDF) on the RBO dataset as a baseline comparison for articulation state estimation.
A Fully-Integrated Sensing and Control System for High-Accuracy Mobile Robotic Building Construction
Dec 04, 2019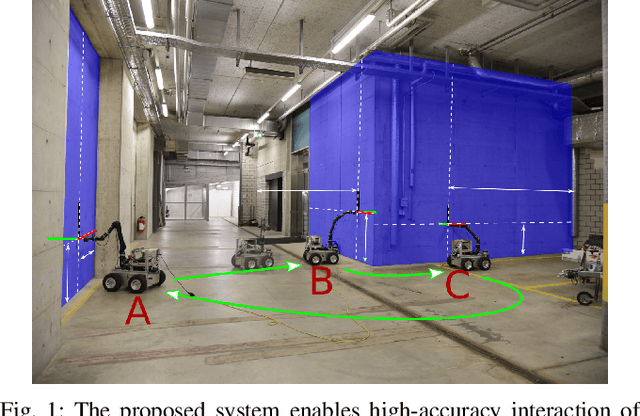
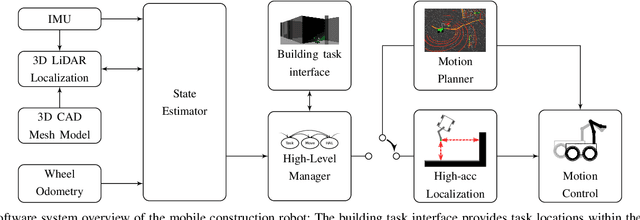
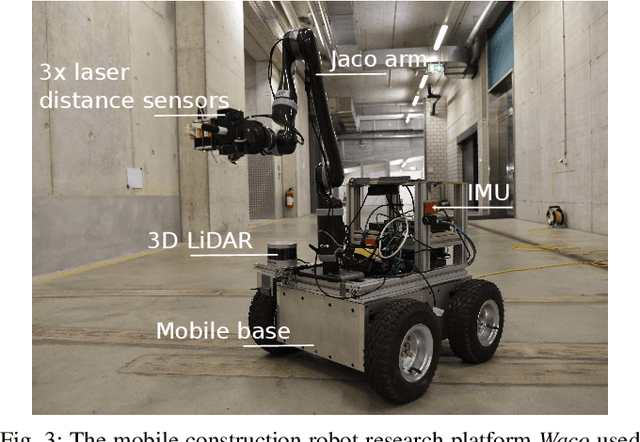
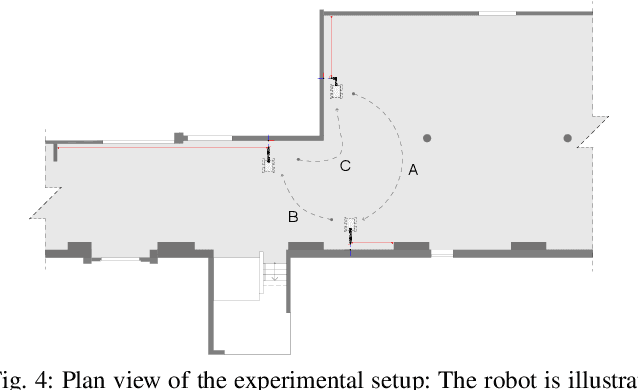
We present a fully-integrated sensing and control system which enables mobile manipulator robots to execute building tasks with millimeter-scale accuracy on building construction sites. The approach leverages multi-modal sensing capabilities for state estimation, tight integration with digital building models, and integrated trajectory planning and whole-body motion control. A novel method for high-accuracy localization updates relative to the known building structure is proposed. The approach is implemented on a real platform and tested under realistic construction conditions. We show that the system can achieve sub-cm end-effector positioning accuracy during fully autonomous operation using solely on-board sensing.