 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLEVA: A high-mobility logistic vehicle with legged suspension
Mar 13, 2025The autonomous transportation of materials over challenging terrain is a challenge with major economic implications and remains unsolved. This paper introduces LEVA, a high-payload, high-mobility robot designed for autonomous logistics across varied terrains, including those typical in agriculture, construction, and search and rescue operations. LEVA uniquely integrates an advanced legged suspension system using parallel kinematics. It is capable of traversing stairs using a rl controller, has steerable wheels, and includes a specialized box pickup mechanism that enables autonomous payload loading as well as precise and reliable cargo transportation of up to 85 kg across uneven surfaces, steps and inclines while maintaining a cot of as low as 0.15. Through extensive experimental validation, LEVA demonstrates its off-road capabilities and reliability regarding payload loading and transport.
Multi-Objective Global Path Planning for Lunar Exploration With a Quadruped Robot
Jun 24, 2024



In unstructured environments the best path is not always the shortest, but needs to consider various objectives like energy efficiency, risk of failure or scientific outcome. This paper proposes a global planner, based on the A* algorithm, capable of individually considering multiple layers of map data for different cost objectives. We introduce weights between the objectives, which can be adapted to achieve a variety of optimal paths. In order to find the best of these paths, a tool for statistical path analysis is presented. Our planner was tested on exemplary lunar topographies to propose two trajectories for exploring the Aristarchus Plateau. The optimized paths significantly reduce the risk of failure while yielding more scientific value compared to a manually planned paths in the same area. The planner and analysis tool are made open-source in order to simplify mission planning for planetary scientists.
Meta Reinforcement Learning for Optimal Design of Legged Robots
Oct 06, 2022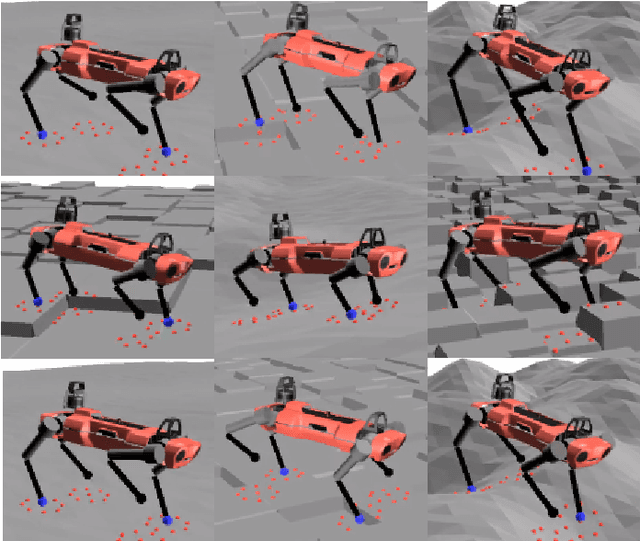
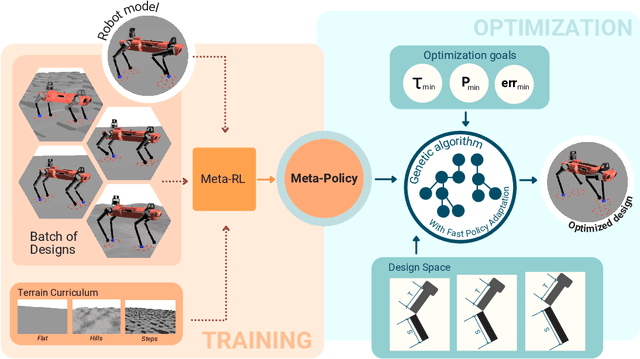
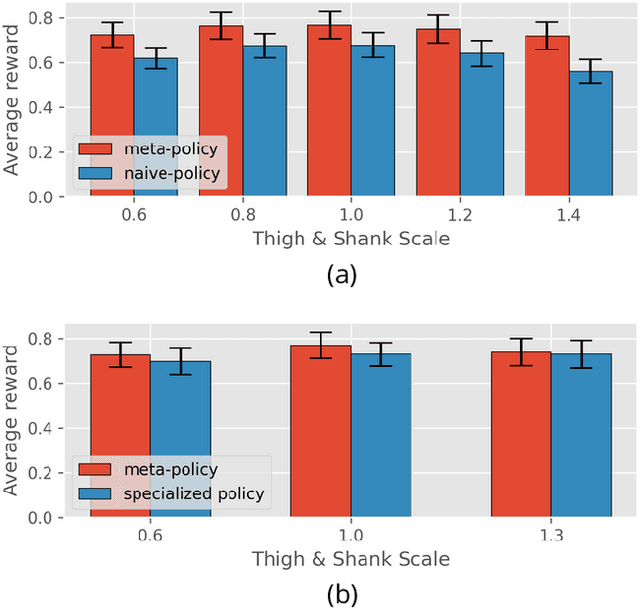
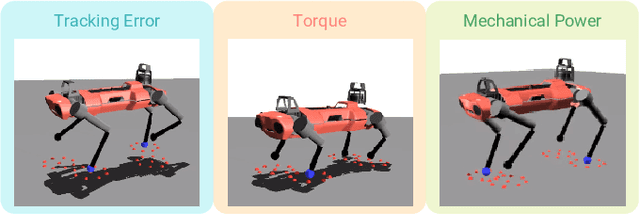
The process of robot design is a complex task and the majority of design decisions are still based on human intuition or tedious manual tuning. A more informed way of facing this task is computational design methods where design parameters are concurrently optimized with corresponding controllers. Existing approaches, however, are strongly influenced by predefined control rules or motion templates and cannot provide end-to-end solutions. In this paper, we present a design optimization framework using model-free meta reinforcement learning, and its application to the optimizing kinematics and actuator parameters of quadrupedal robots. We use meta reinforcement learning to train a locomotion policy that can quickly adapt to different designs. This policy is used to evaluate each design instance during the design optimization. We demonstrate that the policy can control robots of different designs to track random velocity commands over various rough terrains. With controlled experiments, we show that the meta policy achieves close-to-optimal performance for each design instance after adaptation. Lastly, we compare our results against a model-based baseline and show that our approach allows higher performance while not being constrained by predefined motions or gait patterns.
Design and Motion Planning for a Reconfigurable Robotic Base
Jul 04, 2022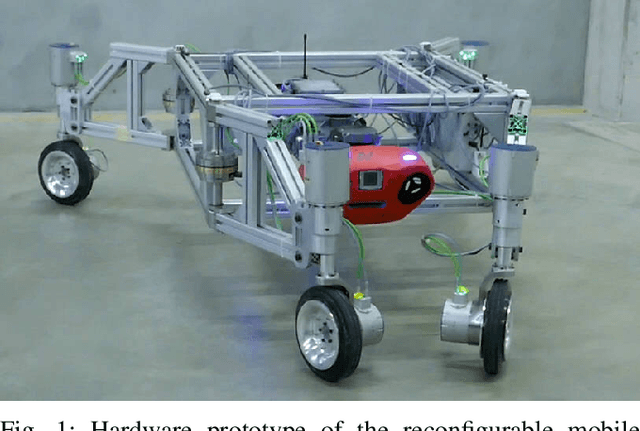
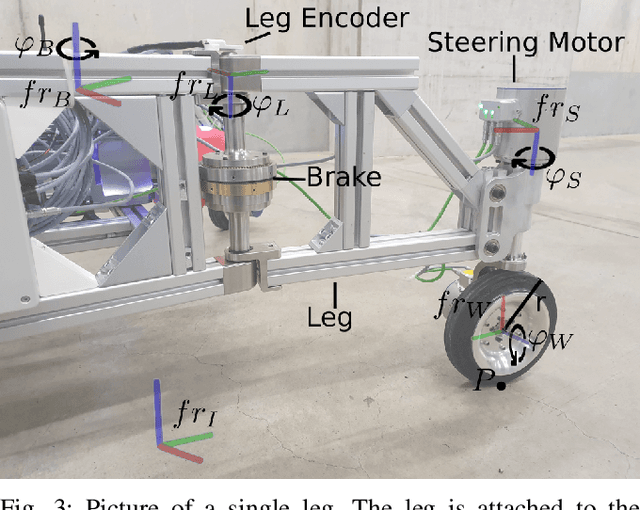
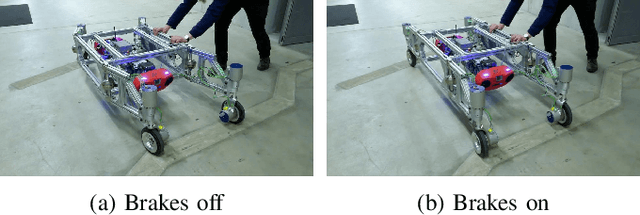
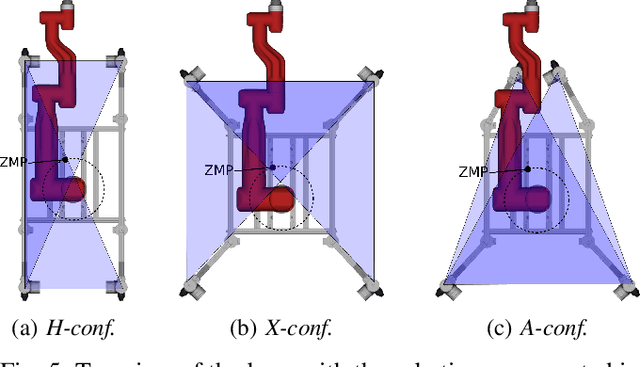
A robotic platform for mobile manipulation needs to satisfy two contradicting requirements for many real-world applications: A compact base is required to navigate through cluttered indoor environments, while the support needs to be large enough to prevent tumbling or tip over, especially during fast manipulation operations with heavy payloads or forceful interaction with the environment. This paper proposes a novel robot design that fulfills both requirements through a versatile footprint. It can reconfigure its footprint to a narrow configuration when navigating through tight spaces and to a wide stance when manipulating heavy objects. Furthermore, its triangular configuration allows for high-precision tasks on uneven ground by preventing support switches. A model predictive control strategy is presented that unifies planning and control for simultaneous navigation, reconfiguration, and manipulation. It converts task-space goals into whole-body motion plans for the new robot. The proposed design has been tested extensively with a hardware prototype. The footprint reconfiguration allows to almost completely remove manipulation-induced vibrations. The control strategy proves effective in both lab experiment and during a real-world construction task.
CERBERUS: Autonomous Legged and Aerial Robotic Exploration in the Tunnel and Urban Circuits of the DARPA Subterranean Challenge
Jan 18, 2022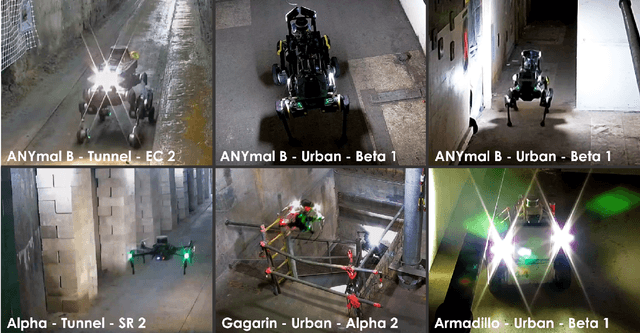
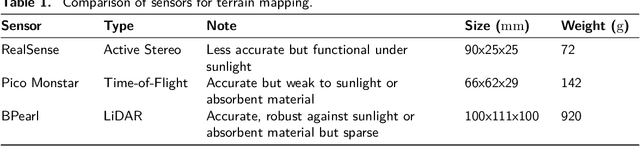
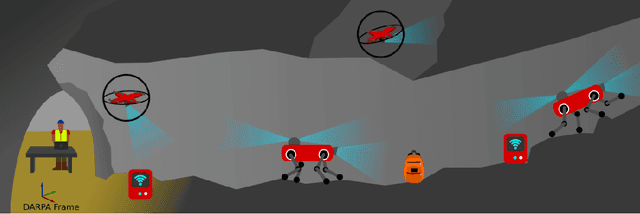

Autonomous exploration of subterranean environments constitutes a major frontier for robotic systems as underground settings present key challenges that can render robot autonomy hard to achieve. This has motivated the DARPA Subterranean Challenge, where teams of robots search for objects of interest in various underground environments. In response, the CERBERUS system-of-systems is presented as a unified strategy towards subterranean exploration using legged and flying robots. As primary robots, ANYmal quadruped systems are deployed considering their endurance and potential to traverse challenging terrain. For aerial robots, both conventional and collision-tolerant multirotors are utilized to explore spaces too narrow or otherwise unreachable by ground systems. Anticipating degraded sensing conditions, a complementary multi-modal sensor fusion approach utilizing camera, LiDAR, and inertial data for resilient robot pose estimation is proposed. Individual robot pose estimates are refined by a centralized multi-robot map optimization approach to improve the reported location accuracy of detected objects of interest in the DARPA-defined coordinate frame. Furthermore, a unified exploration path planning policy is presented to facilitate the autonomous operation of both legged and aerial robots in complex underground networks. Finally, to enable communication between the robots and the base station, CERBERUS utilizes a ground rover with a high-gain antenna and an optical fiber connection to the base station, alongside breadcrumbing of wireless nodes by our legged robots. We report results from the CERBERUS system-of-systems deployment at the DARPA Subterranean Challenge Tunnel and Urban Circuits, along with the current limitations and the lessons learned for the benefit of the community.