 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Efficient Optimal Planning and Control Framework For Quadrupedal Locomotion
Mar 04, 2017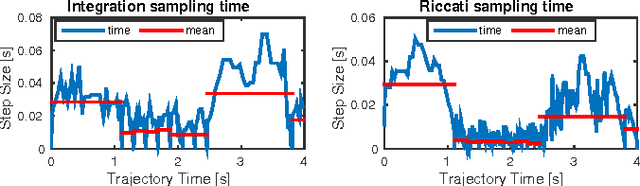

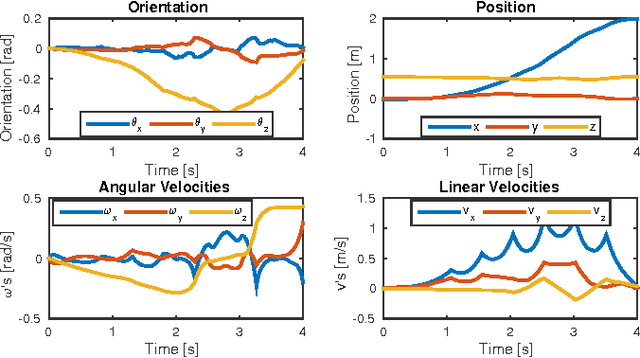
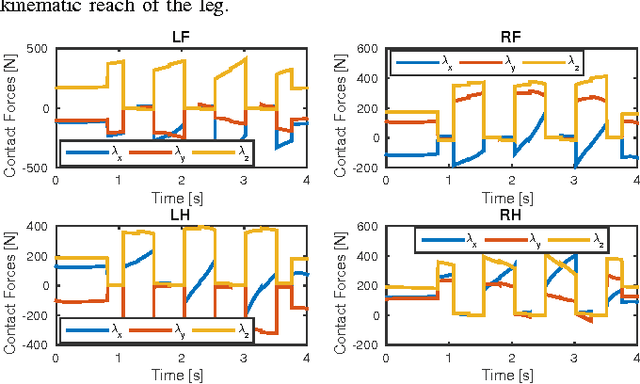
In this paper, we present an efficient Dynamic Programing framework for optimal planning and control of legged robots. First we formulate this problem as an optimal control problem for switched systems. Then we propose a multi--level optimization approach to find the optimal switching times and the optimal continuous control inputs. Through this scheme, the decomposed optimization can potentially be done more efficiently than the combined approach. Finally, we present a continuous-time constrained LQR algorithm which simultaneously optimizes the feedforward and feedback controller with $O(n)$ time-complexity. In order to validate our approach, we show the performance of our framework on a quadrupedal robot. We choose the Center of Mass dynamics and the full kinematic formulation as the switched system model where the switching times as well as the contact forces and the joint velocities are optimized for different locomotion tasks such as gap crossing, walking and trotting.
Mobile Robotic Fabrication at 1:1 scale: the In situ Fabricator
Jan 13, 2017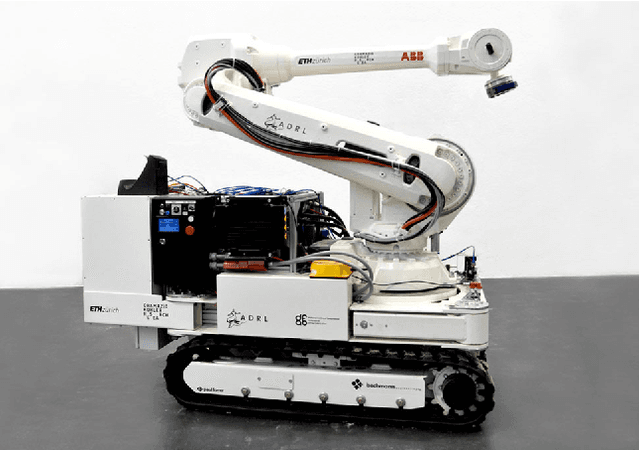
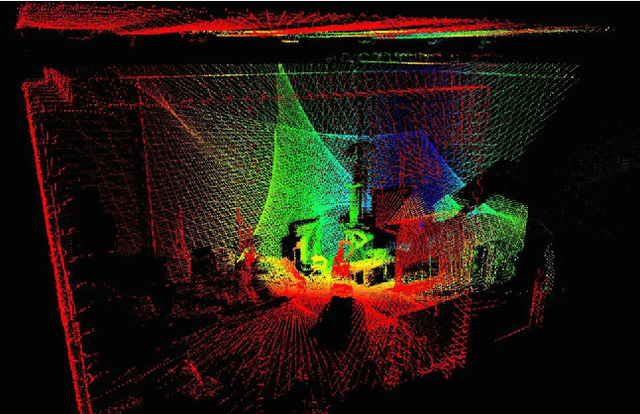
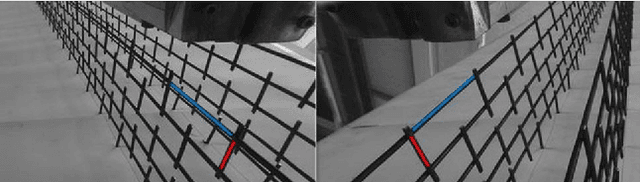
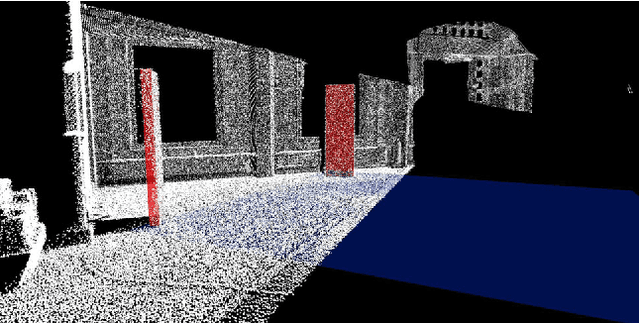
This paper presents the concept of an In situ Fabricator, a mobile robot intended for on-site manufacturing, assembly and digital fabrication. We present an overview of a prototype system, its capabilities, and highlight the importance of high-performance control, estimation and planning algorithms for achieving desired construction goals. Next, we detail on two architectural application scenarios: first, building a full-size undulating brick wall, which required a number of repositioning and autonomous localisation manoeuvres. Second, the Mesh Mould concrete process, which shows that an In situ Fabricator in combination with an innovative digital fabrication tool can be used to enable completely novel building technologies. Subsequently, important limitations and disadvantages of our approach are discussed. Based on that, we identify the need for a new type of robotic actuator, which facilitates the design of novel full-scale construction robots. We provide brief insight into the development of this actuator and conclude the paper with an outlook on the next-generation In situ Fabricator, which is currently under development.