 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHEAP -- The autonomous walking excavator
Jun 09, 2021
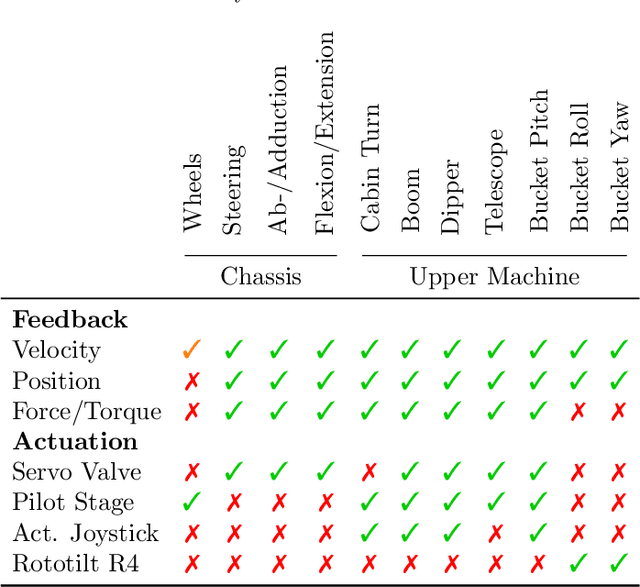
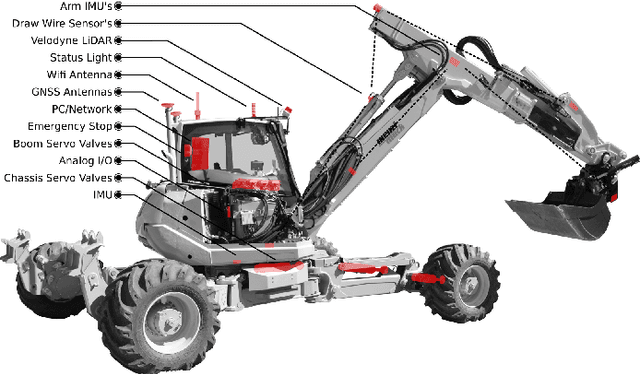
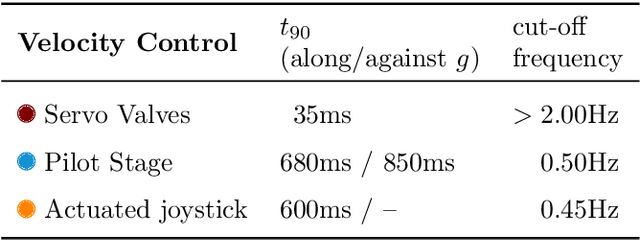
The demand and the potential for automation in the construction sector is unmatched, particularly for increasing environmental sustainability, improving worker safety and reducing labor shortages. We have developed an autonomous walking excavator - based one of the most versatile machines found on construction sites - as one way to begin fulfilling this potential. This article describes the process of converting an off-the-shelf construction machine into an autonomous robotic system. First we outline the necessary sensing equipment for full autonomy and the novel actuation of the legs, and compare three different complementary actuation principles for the excavator's arm. Second, we solve the state estimation problem for a general wheeled-legged robot. Beside kinematic measurements, it includes GNSS-RTK, to absolutely reference the machine on a construction site. Third, we developed individual controllers for driving, chassis balancing and arm motions allowing for fully autonomous operation. Lastly, we highlight the machine's potential in four different real-world applications, e.g. autonomous trench digging, autonomous assembly of dry stone walls, autonomous forestry work and semi-autonomous teleoperation. On top, we also share some development insights and possible future research directions.
ConFusion: Sensor Fusion for Complex Robotic Systems using Nonlinear Optimization
Mar 01, 2019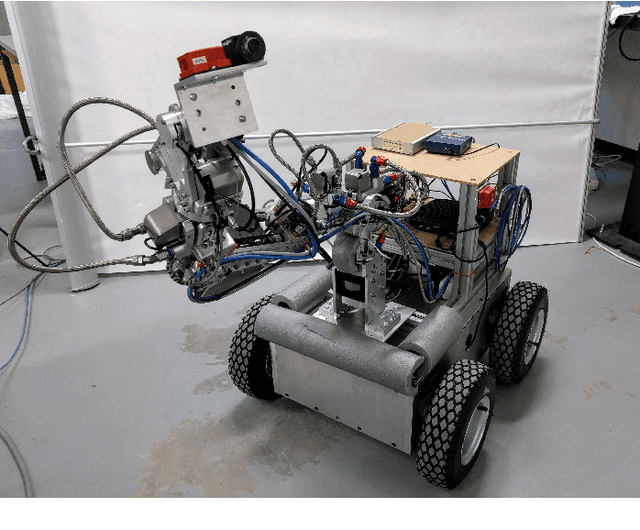
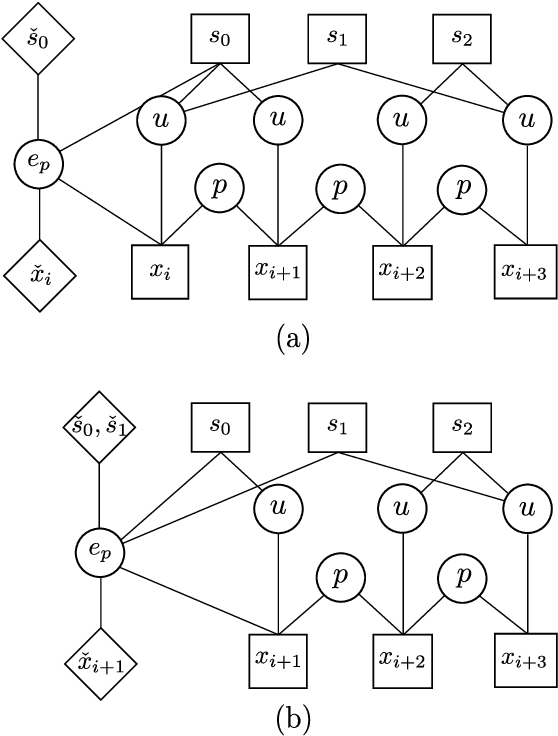
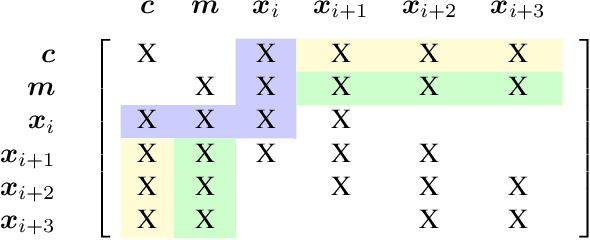
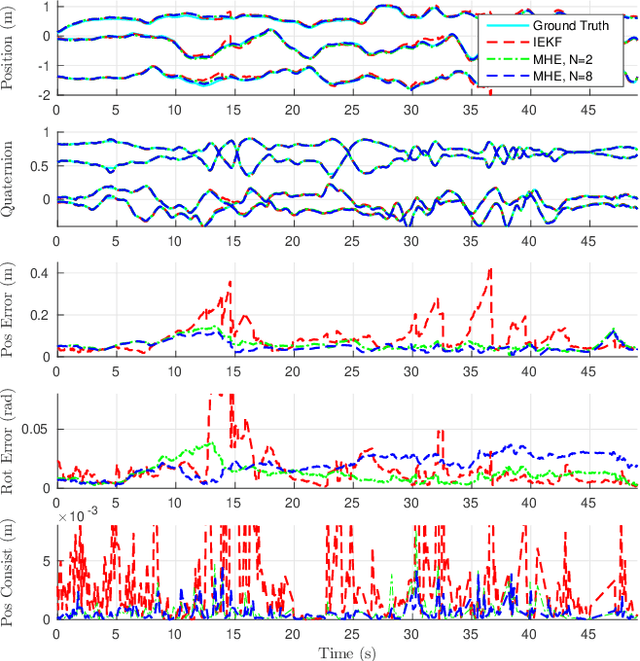
We present ConFusion, an open-source package for online sensor fusion for robotic applications. ConFusion is a modular framework for fusing measurements from many heterogeneous sensors within a moving horizon estimator. ConFusion offers greater flexibility in sensor fusion problem design than filtering-based systems and the ability to scale the online estimate quality with the available computing power. We demonstrate its performance in comparison to an iterated extended Kalman filter in visual-inertial tracking, and show its versatility through whole-body sensor fusion on a mobile manipulator.