 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
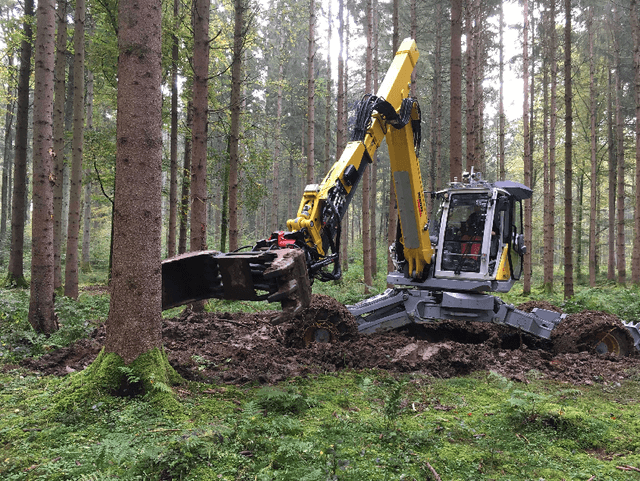
Add to EdgeHEAP -- The autonomous walking excavator
Jun 09, 2021
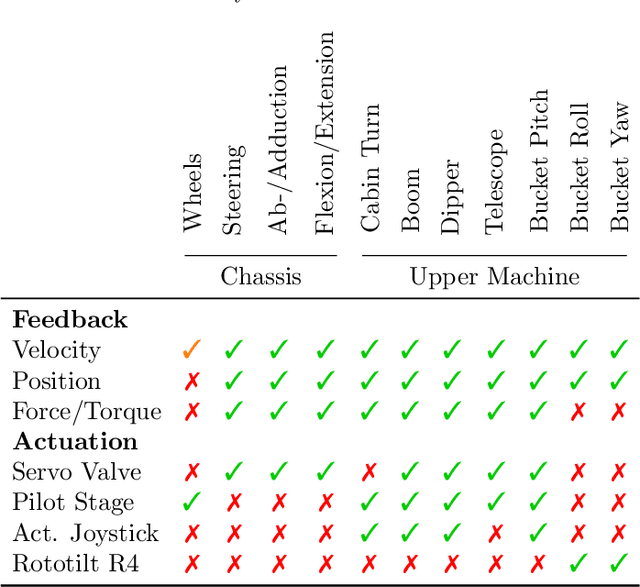
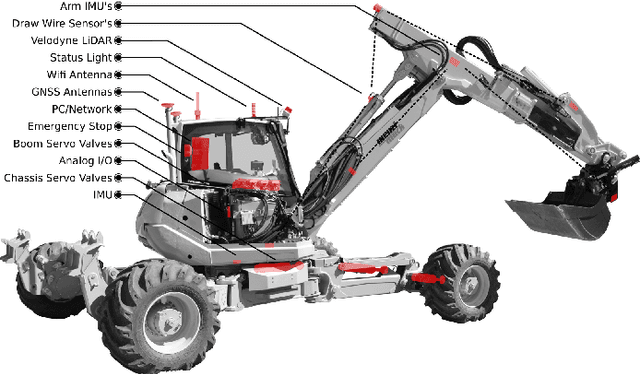
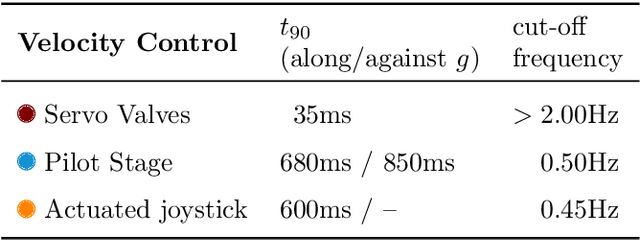
The demand and the potential for automation in the construction sector is unmatched, particularly for increasing environmental sustainability, improving worker safety and reducing labor shortages. We have developed an autonomous walking excavator - based one of the most versatile machines found on construction sites - as one way to begin fulfilling this potential. This article describes the process of converting an off-the-shelf construction machine into an autonomous robotic system. First we outline the necessary sensing equipment for full autonomy and the novel actuation of the legs, and compare three different complementary actuation principles for the excavator's arm. Second, we solve the state estimation problem for a general wheeled-legged robot. Beside kinematic measurements, it includes GNSS-RTK, to absolutely reference the machine on a construction site. Third, we developed individual controllers for driving, chassis balancing and arm motions allowing for fully autonomous operation. Lastly, we highlight the machine's potential in four different real-world applications, e.g. autonomous trench digging, autonomous assembly of dry stone walls, autonomous forestry work and semi-autonomous teleoperation. On top, we also share some development insights and possible future research directions.
Towards Autonomous Robotic Precision Harvesting
Apr 20, 2021
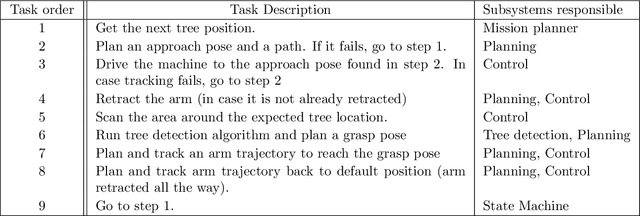
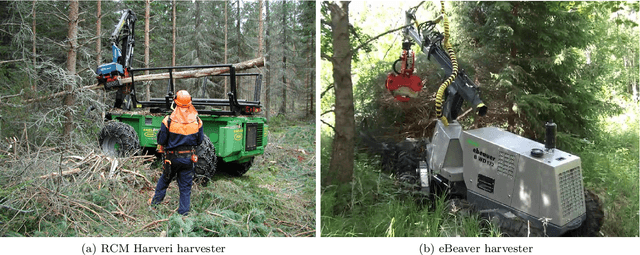
This paper presents an integrated system for performing precision harvesting missions using a walking harvester. Our harvester performs the challenging task of autonomous navigation and tree grabbing in a confined, GPS denied forest environment. Strategies for mapping, localization, planning, and control are proposed and integrated into a fully autonomous system. The mission starts with a human or a mobile robot mapping the area of interest using a custom-made sensor module. Subsequently, a human expert or a data-supported algorithm selects the trees for harvesting. The sensor module is then mounted on the machine and used for localization within the given map. A planning algorithm searches for both an approach pose and a path in a single path planning problem. We design a path following controller leveraging the walking harvester's capabilities for negotiating rough terrain. Upon reaching the approach pose, the machine grabs a tree with a general-purpose gripper. This process repeats for all the trees selected by the operator (algorithm). Our system has been tested on a testing field with tree trunks and in a natural forest. To the best of our knowledge, this is the first time this level of autonomy has been shown on a full-size hydraulic machine operating in a realistic environment.