 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHAMNO: A Hierarchical Adaptive Multi-scale Neural Operator with Physics-Informed Learning for Dynamical Systems
Jun 10, 2026Neural operators provide a powerful framework for learning solution mappings of partial differential equations directly in function space. However, many existing architectures still struggle to represent nonlinear time-dependent systems that involve multi-scale structures, long-range interactions, and stable long-time evolution. In this work, we introduce the Hierarchical Adaptive Multi-scale Neural Operator (HAMNO), a neural-operator architecture that combines local convolutional representations, global spectral operators, and hierarchical encoder-decoder processing. The central component of HAMNO is a data-dependent gating mechanism that adaptively balances local and global information at each spatial location, allowing the model to resolve fine-scale features while preserving long-range dependencies. We further develop a physics-informed extension, PI-HAMNO, based on a multi-objective loss strategy that combines data fitting with strong- and weak-form physics constraints. The strong-form term penalizes the domain-integrated squared PDE residual in physical coordinates, while the weak-form term is constructed by multiplying the governing residual by finite-element test functions and evaluating the resulting element integrals using centroid-based tetrahedral quadrature. The framework is evaluated on non-periodic Allen-Cahn (AC), Cahn-Hilliard (CH), and Swift-Hohenberg (SH) equations defined on cubic domains. Across long-horizon rollout, data-limited training, out-of-distribution initial-condition shifts, and random-seed variations, HAMNO improves predictive accuracy over standard neural-operator baselines, while PI-HAMNO further enhances stability, physical consistency, and data efficiency. The implementation is publicly available at https://github.com/MBamdad/HAMNO .
Dmsh: A Multi-Agent Reinforcement Learning Framework for All-Quad Mesh Generation
Jun 09, 2026Generating high-quality meshes for arbitrary geometries remains a fundamental bottleneck in computational engineering, often demanding heuristic tuning and semi-manual workflows. In this paper, we introduce Dmsh, a first fully automated reinforcement learning pipeline that unifies geometric decomposition and quadrilateral mesh generation within a single learning-based framework. Dmsh decomposes the problem through three coordinated agents handling topology simplification, geometric regularization, and mesh generation. The meshing process is formulated as a Markov Decision Process and solved using a parametric Soft Actor-Critic architecture with decoupled critics, enabling efficient exploration of a hybrid discrete-continuous action space. A curriculum learning strategy ensures scalability from simple domains to highly complex geometries, suppressing seed variance. By design, the recursive decomposition enables parallel meshing of subregions, yielding globally conforming all-quadrilateral meshes without post hoc correction. Across a wide range of benchmarks, Dmsh consistently outperforms existing methods in automation, robustness, and mesh quality, establishing a new paradigm for learning-based mesh generation.
WINO: A Weak-Form Physics Informed Neural Operator for Hyperelasticity on Variable Domains
May 23, 2026We propose a Weak-form Physics-Informed Neural Operator (WINO), a data-free framework that combines the efficiency of neural operators with the geometric flexibility of the $\varphi$-finite element method ($\varphi$-FEM). $\varphi$-FEM is an unfitted method that accommodates geometric variations without body-fitted meshes, where the domain geometry is represented by the level-set function $\varphi$. To impose the boundary conditions, Dirichlet problems adopt the $\varphi$-FEM lifting so only the homogeneous displacement contribution is learned, whereas traction-driven Neumann problems additionally predict the auxiliary fields necessary for the unfitted weak formulation. Parameters are trained by minimizing squared weak-form residuals aligned with $\varphi$-FEM together with squared penalties on the cut-cell auxiliary equations, which removes the need for large paired datasets of converged reference solutions. After training, WINO outputs can seed the nonlinear $\varphi$-FEM solvers as neural operator warm starts (NOWS), which reduce iteration counts relative to traditional cold-started solvers. Numerical benchmarks show that WINO achieves high accuracy below 0.04 across all benchmarks, while reducing total computational time by 50--80\% compared with purely data-driven methods.
Replay-Based Continual Learning for Physics-Informed Neural Operators
May 06, 2026Neural operators generally demonstrate strong predictive performance on in-distribution (ID) problems. However, a critical limitation of existing methods is their significant performance degradation when encountering out-of-distribution (OOD) data. To address this issue, this work introduces continual learning into physics-informed neural operators, with particular emphasis on neural operators built upon the Transolver architecture, and proposes a simple yet effective replay-based continual learning strategy. The proposed method is fully physics-informed and does not require labeled data, relying solely on input fields together with physical constraints for training. When new OOD data become available, a small number of past data are incorporated through a distillation-based constraint to preserve previously acquired knowledge and alleviate catastrophic forgetting. Meanwhile, a transfer learning LoRA is employed to enable rapid adaptation to the new data. The proposed framework is systematically validated on three representative physical problems, including the Darcy flow problem in fluid mechanics, a two-dimensional hyperelastic brain tumor problem in biomechanics, and a three-dimensional linear elastic Triply Periodic Minimal Surfaces problem in solid mechanics. The results demonstrate that the proposed method effectively mitigates catastrophic forgetting on previously learned data while maintaining fast adaptability to new data. Compared with conventional joint training strategies, the proposed method significantly improves training efficiency while reducing additional memory usage and computational cost.
Physics-informed Machine Learning for Static Friction Modeling in Robotic Manipulators Based on Kolmogorov-Arnold Networks
Nov 13, 2025Friction modeling plays a crucial role in achieving high-precision motion control in robotic operating systems. Traditional static friction models (such as the Stribeck model) are widely used due to their simple forms; however, they typically require predefined functional assumptions, which poses significant challenges when dealing with unknown functional structures. To address this issue, this paper proposes a physics-inspired machine learning approach based on the Kolmogorov Arnold Network (KAN) for static friction modeling of robotic joints. The method integrates spline activation functions with a symbolic regression mechanism, enabling model simplification and physical expression extraction through pruning and attribute scoring, while maintaining both high prediction accuracy and interpretability. We first validate the method's capability to accurately identify key parameters under known functional models, and further demonstrate its robustness and generalization ability under conditions with unknown functional structures and noisy data. Experiments conducted on both synthetic data and real friction data collected from a six-degree-of-freedom industrial manipulator show that the proposed method achieves a coefficient of determination greater than 0.95 across various tasks and successfully extracts concise and physically meaningful friction expressions. This study provides a new perspective for interpretable and data-driven robotic friction modeling with promising engineering applicability.
Transfer Learning in Physics-Informed Neural Networks: Full Fine-Tuning, Lightweight Fine-Tuning, and Low-Rank Adaptation
Feb 02, 2025AI for PDEs has garnered significant attention, particularly Physics-Informed Neural Networks (PINNs). However, PINNs are typically limited to solving specific problems, and any changes in problem conditions necessitate retraining. Therefore, we explore the generalization capability of transfer learning in the strong and energy form of PINNs across different boundary conditions, materials, and geometries. The transfer learning methods we employ include full finetuning, lightweight finetuning, and Low-Rank Adaptation (LoRA). The results demonstrate that full finetuning and LoRA can significantly improve convergence speed while providing a slight enhancement in accuracy.
Energy-based physics-informed neural network for frictionless contact problems under large deformation
Nov 06, 2024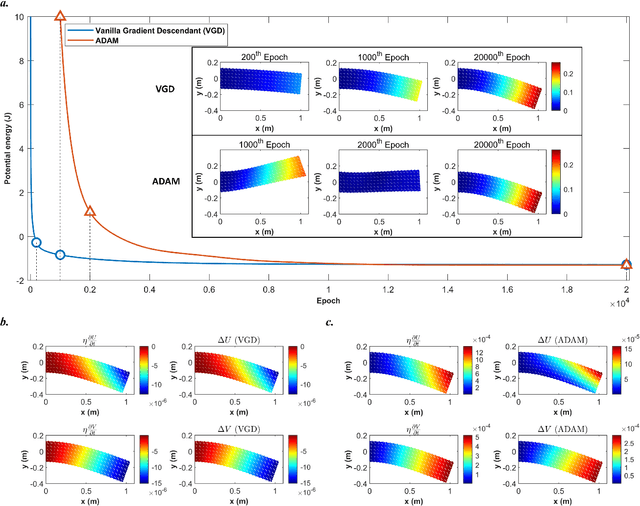

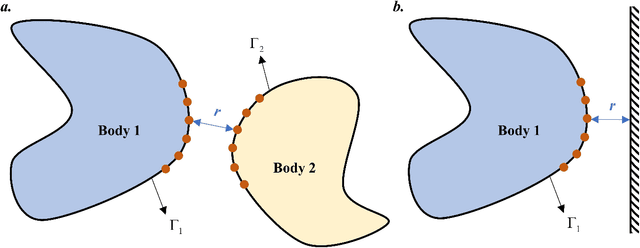
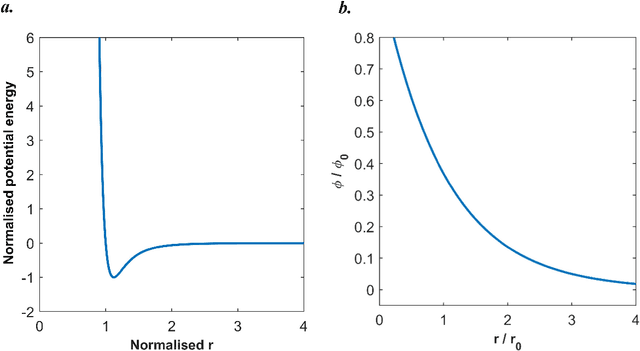
Numerical methods for contact mechanics are of great importance in engineering applications, enabling the prediction and analysis of complex surface interactions under various conditions. In this work, we propose an energy-based physics-informed neural network (PINNs) framework for solving frictionless contact problems under large deformation. Inspired by microscopic Lennard-Jones potential, a surface contact energy is used to describe the contact phenomena. To ensure the robustness of the proposed PINN framework, relaxation, gradual loading and output scaling techniques are introduced. In the numerical examples, the well-known Hertz contact benchmark problem is conducted, demonstrating the effectiveness and robustness of the proposed PINNs framework. Moreover, challenging contact problems with the consideration of geometrical and material nonlinearities are tested. It has been shown that the proposed PINNs framework provides a reliable and powerful tool for nonlinear contact mechanics. More importantly, the proposed PINNs framework exhibits competitive computational efficiency to the commercial FEM software when dealing with those complex contact problems. The codes used in this manuscript are available at https://github.com/JinshuaiBai/energy_PINN_Contact.(The code will be available after acceptance)
DeepNetBeam: A Framework for the Analysis of Functionally Graded Porous Beams
Aug 04, 2024
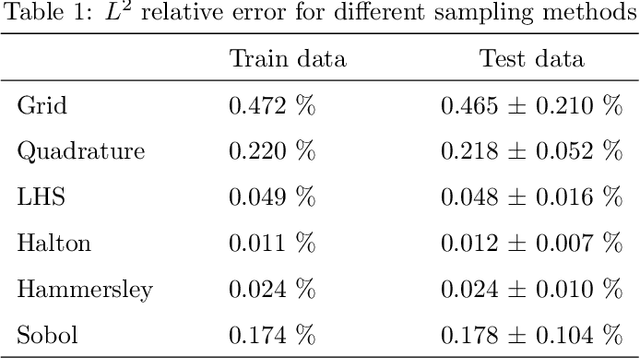
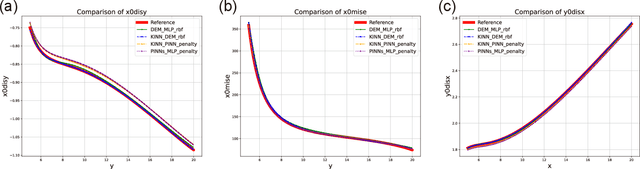
This study investigates different Scientific Machine Learning (SciML) approaches for the analysis of functionally graded (FG) porous beams and compares them under a new framework. The beam material properties are assumed to vary as an arbitrary continuous function. The methods consider the output of a neural network/operator as an approximation to the displacement fields and derive the equations governing beam behavior based on the continuum formulation. The methods are implemented in the framework and formulated by three approaches: (a) the vector approach leads to a Physics-Informed Neural Network (PINN), (b) the energy approach brings about the Deep Energy Method (DEM), and (c) the data-driven approach, which results in a class of Neural Operator methods. Finally, a neural operator has been trained to predict the response of the porous beam with functionally graded material under any porosity distribution pattern and any arbitrary traction condition. The results are validated with analytical and numerical reference solutions. The data and code accompanying this manuscript will be publicly available at https://github.com/eshaghi-ms/DeepNetBeam.
Kolmogorov Arnold Informed neural network: A physics-informed deep learning framework for solving PDEs based on Kolmogorov Arnold Networks
Jun 16, 2024
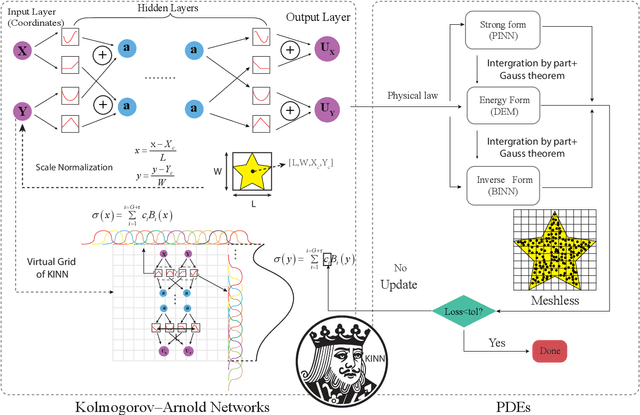
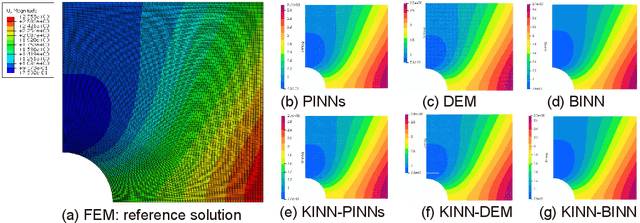
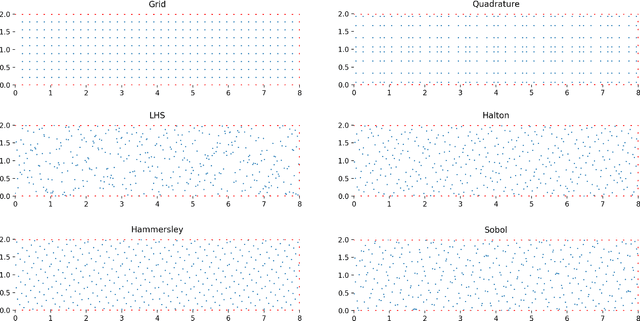
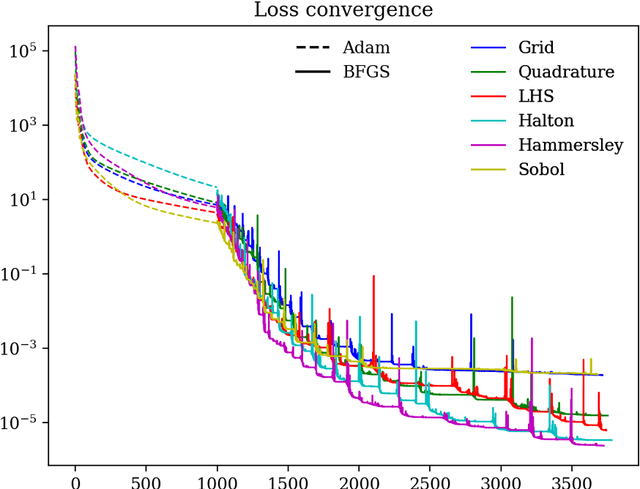
AI for partial differential equations (PDEs) has garnered significant attention, particularly with the emergence of Physics-informed neural networks (PINNs). The recent advent of Kolmogorov-Arnold Network (KAN) indicates that there is potential to revisit and enhance the previously MLP-based PINNs. Compared to MLPs, KANs offer interpretability and require fewer parameters. PDEs can be described in various forms, such as strong form, energy form, and inverse form. While mathematically equivalent, these forms are not computationally equivalent, making the exploration of different PDE formulations significant in computational physics. Thus, we propose different PDE forms based on KAN instead of MLP, termed Kolmogorov-Arnold-Informed Neural Network (KINN). We systematically compare MLP and KAN in various numerical examples of PDEs, including multi-scale, singularity, stress concentration, nonlinear hyperelasticity, heterogeneous, and complex geometry problems. Our results demonstrate that KINN significantly outperforms MLP in terms of accuracy and convergence speed for numerous PDEs in computational solid mechanics, except for the complex geometry problem. This highlights KINN's potential for more efficient and accurate PDE solutions in AI for PDEs.
Multigoal-oriented dual-weighted-residual error estimation using deep neural networks
Dec 22, 2021
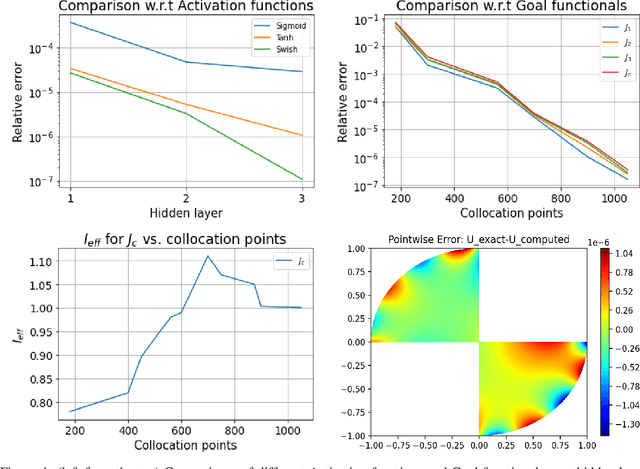
Deep learning has shown successful application in visual recognition and certain artificial intelligence tasks. Deep learning is also considered as a powerful tool with high flexibility to approximate functions. In the present work, functions with desired properties are devised to approximate the solutions of PDEs. Our approach is based on a posteriori error estimation in which the adjoint problem is solved for the error localization to formulate an error estimator within the framework of neural network. An efficient and easy to implement algorithm is developed to obtain a posteriori error estimate for multiple goal functionals by employing the dual-weighted residual approach, which is followed by the computation of both primal and adjoint solutions using the neural network. The present study shows that such a data-driven model based learning has superior approximation of quantities of interest even with relatively less training data. The novel algorithmic developments are substantiated with numerical test examples. The advantages of using deep neural network over the shallow neural network are demonstrated and the convergence enhancing techniques are also presented