 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating Active Sampling for Hardness Classification with Vision-Based Tactile Sensors
May 19, 2025One of the most important object properties that humans and robots perceive through touch is hardness. This paper investigates information-theoretic active sampling strategies for sample-efficient hardness classification with vision-based tactile sensors. We evaluate three probabilistic classifier models and two model-uncertainty-based sampling strategies on a robotic setup as well as on a previously published dataset of samples collected by human testers. Our findings indicate that the active sampling approaches, driven by uncertainty metrics, surpass a random sampling baseline in terms of accuracy and stability. Additionally, while in our human study, the participants achieve an average accuracy of 48.00%, our best approach achieves an average accuracy of 88.78% on the same set of objects, demonstrating the effectiveness of vision-based tactile sensors for object hardness classification.
Towards Safe Robot Foundation Models Using Inductive Biases
May 15, 2025Safety is a critical requirement for the real-world deployment of robotic systems. Unfortunately, while current robot foundation models show promising generalization capabilities across a wide variety of tasks, they fail to address safety, an important aspect for ensuring long-term operation. Current robot foundation models assume that safe behavior should emerge by learning from a sufficiently large dataset of demonstrations. However, this approach has two clear major drawbacks. Firstly, there are no formal safety guarantees for a behavior cloning policy trained using supervised learning. Secondly, without explicit knowledge of any safety constraints, the policy may require an unreasonable number of additional demonstrations to even approximate the desired constrained behavior. To solve these key issues, we show how we can instead combine robot foundation models with geometric inductive biases using ATACOM, a safety layer placed after the foundation policy that ensures safe state transitions by enforcing action constraints. With this approach, we can ensure formal safety guarantees for generalist policies without providing extensive demonstrations of safe behavior, and without requiring any specific fine-tuning for safety. Our experiments show that our approach can be beneficial both for classical manipulation tasks, where we avoid unwanted collisions with irrelevant objects, and for dynamic tasks, such as the robot air hockey environment, where we can generate fast trajectories respecting complex tasks and joint space constraints.
Active Perception for Tactile Sensing: A Task-Agnostic Attention-Based Approach
May 09, 2025Humans make extensive use of haptic exploration to map and identify the properties of the objects that we touch. In robotics, active tactile perception has emerged as an important research domain that complements vision for tasks such as object classification, shape reconstruction, and manipulation. This work introduces TAP (Task-agnostic Active Perception) -- a novel framework that leverages reinforcement learning (RL) and transformer-based architectures to address the challenges posed by partially observable environments. TAP integrates Soft Actor-Critic (SAC) and CrossQ algorithms within a unified optimization objective, jointly training a perception module and decision-making policy. By design, TAP is completely task-agnostic and can, in principle, generalize to any active perception problem. We evaluate TAP across diverse tasks, including toy examples and realistic applications involving haptic exploration of 3D models from the Tactile MNIST benchmark. Experiments demonstrate the efficacy of TAP, achieving high accuracies on the Tactile MNIST haptic digit recognition task and a tactile pose estimation task. These findings underscore the potential of TAP as a versatile and generalizable framework for advancing active tactile perception in robotics.
On the Importance of Tactile Sensing for Imitation Learning: A Case Study on Robotic Match Lighting
Apr 18, 2025The field of robotic manipulation has advanced significantly in the last years. At the sensing level, several novel tactile sensors have been developed, capable of providing accurate contact information. On a methodological level, learning from demonstrations has proven an efficient paradigm to obtain performant robotic manipulation policies. The combination of both holds the promise to extract crucial contact-related information from the demonstration data and actively exploit it during policy rollouts. However, despite its potential, it remains an underexplored direction. This work therefore proposes a multimodal, visuotactile imitation learning framework capable of efficiently learning fast and dexterous manipulation policies. We evaluate our framework on the dynamic, contact-rich task of robotic match lighting - a task in which tactile feedback influences human manipulation performance. The experimental results show that adding tactile information into the policies significantly improves performance by over 40%, thereby underlining the importance of tactile sensing for contact-rich manipulation tasks. Project website: https://sites.google.com/view/tactile-il .
ESPARGOS: An Ultra Low-Cost, Realtime-Capable Multi-Antenna WiFi Channel Sounder
Feb 13, 2025Multi-antenna channel sounding is a technique for measuring the propagation characteristics of electromagnetic waves that is commonly employed for parameterizing channel models. Channel sounders are usually custom-built from many Software Defined Radio receivers, making them expensive to procure and difficult to operate, which constrains the set of users to a few specialized scientific institutions and industrial research laboratories. Recent developments in Joint Communications and Sensing (JCaS) extend the possible uses of channel data to applications like human activity recognition, human presence detection, user localization and wireless Channel Charting, all of which are of great interest to security researchers, experts in industrial automation and others. However, due to a lack of affordable, easy-to-use and commercially available multi-antenna channel sounders, those scientific communities can be hindered by their lack of access to wireless channel measurements. To lower the barrier to entry for channel sounding, we develop an ultra low-cost measurement hardware platform based on mass-produced WiFi chips, which is easily affordable to research groups and even hobbyists.
TacEx: GelSight Tactile Simulation in Isaac Sim -- Combining Soft-Body and Visuotactile Simulators
Nov 07, 2024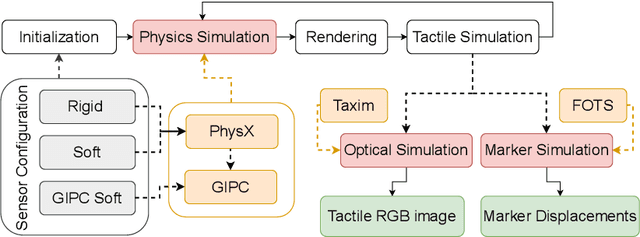
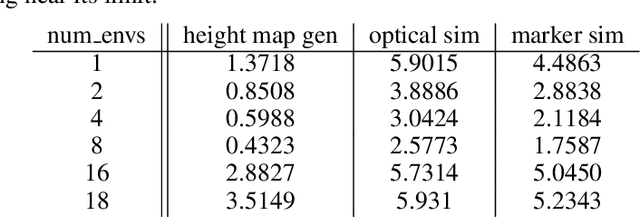
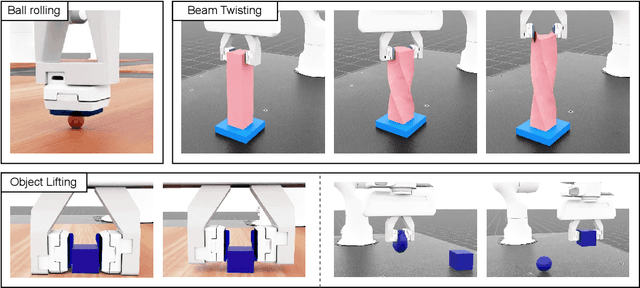

Training robot policies in simulation is becoming increasingly popular; nevertheless, a precise, reliable, and easy-to-use tactile simulator for contact-rich manipulation tasks is still missing. To close this gap, we develop TacEx -- a modular tactile simulation framework. We embed a state-of-the-art soft-body simulator for contacts named GIPC and vision-based tactile simulators Taxim and FOTS into Isaac Sim to achieve robust and plausible simulation of the visuotactile sensor GelSight Mini. We implement several Isaac Lab environments for Reinforcement Learning (RL) leveraging our TacEx simulation, including object pushing, lifting, and pole balancing. We validate that the simulation is stable and that the high-dimensional observations, such as the gel deformation and the RGB images from the GelSight camera, can be used for training. The code, videos, and additional results will be released online https://sites.google.com/view/tacex.
Analysing the Interplay of Vision and Touch for Dexterous Insertion Tasks
Oct 31, 2024


Robotic insertion tasks remain challenging due to uncertainties in perception and the need for precise control, particularly in unstructured environments. While humans seamlessly combine vision and touch for such tasks, effectively integrating these modalities in robotic systems is still an open problem. Our work presents an extensive analysis of the interplay between visual and tactile feedback during dexterous insertion tasks, showing that tactile sensing can greatly enhance success rates on challenging insertions with tight tolerances and varied hole orientations that vision alone cannot solve. These findings provide valuable insights for designing more effective multi-modal robotic control systems and highlight the critical role of tactile feedback in contact-rich manipulation tasks.
Learning Tactile Insertion in the Real World
May 01, 2024


Humans have exceptional tactile sensing capabilities, which they can leverage to solve challenging, partially observable tasks that cannot be solved from visual observation alone. Research in tactile sensing attempts to unlock this new input modality for robots. Lately, these sensors have become cheaper and, thus, widely available. At the same time, the question of how to integrate them into control loops is still an active area of research, with central challenges being partial observability and the contact-rich nature of manipulation tasks. In this study, we propose to use Reinforcement Learning to learn an end-to-end policy, mapping directly from tactile sensor readings to actions. Specifically, we use Dreamer-v3 on a challenging, partially observable robotic insertion task with a Franka Research 3, both in simulation and on a real system. For the real setup, we built a robotic platform capable of resetting itself fully autonomously, allowing for extensive training runs without human supervision. Our preliminary results indicate that Dreamer is capable of utilizing tactile inputs to solve robotic manipulation tasks in simulation and reality. Furthermore, we find that providing the robot with tactile feedback generally improves task performance, though, in our setup, we do not yet include other sensing modalities. In the future, we plan to utilize our platform to evaluate a wide range of other Reinforcement Learning algorithms on tactile tasks.
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Apr 30, 2024
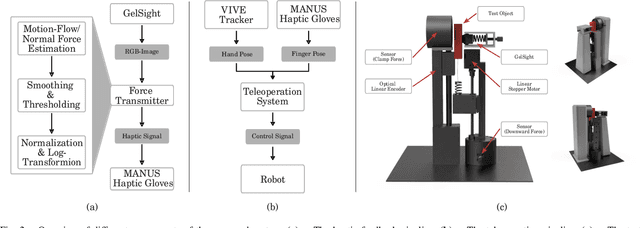
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
What Matters for Active Texture Recognition With Vision-Based Tactile Sensors
Mar 20, 2024This paper explores active sensing strategies that employ vision-based tactile sensors for robotic perception and classification of fabric textures. We formalize the active sampling problem in the context of tactile fabric recognition and provide an implementation of information-theoretic exploration strategies based on minimizing predictive entropy and variance of probabilistic models. Through ablation studies and human experiments, we investigate which components are crucial for quick and reliable texture recognition. Along with the active sampling strategies, we evaluate neural network architectures, representations of uncertainty, influence of data augmentation, and dataset variability. By evaluating our method on a previously published Active Clothing Perception Dataset and on a real robotic system, we establish that the choice of the active exploration strategy has only a minor influence on the recognition accuracy, whereas data augmentation and dropout rate play a significantly larger role. In a comparison study, while humans achieve 66.9% recognition accuracy, our best approach reaches 90.0% in under 5 touches, highlighting that vision-based tactile sensors are highly effective for fabric texture recognition.