 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Safe Robot Foundation Models Using Inductive Biases
May 15, 2025Safety is a critical requirement for the real-world deployment of robotic systems. Unfortunately, while current robot foundation models show promising generalization capabilities across a wide variety of tasks, they fail to address safety, an important aspect for ensuring long-term operation. Current robot foundation models assume that safe behavior should emerge by learning from a sufficiently large dataset of demonstrations. However, this approach has two clear major drawbacks. Firstly, there are no formal safety guarantees for a behavior cloning policy trained using supervised learning. Secondly, without explicit knowledge of any safety constraints, the policy may require an unreasonable number of additional demonstrations to even approximate the desired constrained behavior. To solve these key issues, we show how we can instead combine robot foundation models with geometric inductive biases using ATACOM, a safety layer placed after the foundation policy that ensures safe state transitions by enforcing action constraints. With this approach, we can ensure formal safety guarantees for generalist policies without providing extensive demonstrations of safe behavior, and without requiring any specific fine-tuning for safety. Our experiments show that our approach can be beneficial both for classical manipulation tasks, where we avoid unwanted collisions with irrelevant objects, and for dynamic tasks, such as the robot air hockey environment, where we can generate fast trajectories respecting complex tasks and joint space constraints.
Towards Safe Robot Foundation Models
Mar 10, 2025Robot foundation models hold the potential for deployment across diverse environments, from industrial applications to household tasks. While current research focuses primarily on the policies' generalization capabilities across a variety of tasks, it fails to address safety, a critical requirement for deployment on real-world systems. In this paper, we introduce a safety layer designed to constrain the action space of any generalist policy appropriately. Our approach uses ATACOM, a safe reinforcement learning algorithm that creates a safe action space and, therefore, ensures safe state transitions. By extending ATACOM to generalist policies, our method facilitates their deployment in safety-critical scenarios without requiring any specific safety fine-tuning. We demonstrate the effectiveness of this safety layer in an air hockey environment, where it prevents a puck-hitting agent from colliding with its surroundings, a failure observed in generalist policies.
sbi reloaded: a toolkit for simulation-based inference workflows
Nov 26, 2024
Scientists and engineers use simulators to model empirically observed phenomena. However, tuning the parameters of a simulator to ensure its outputs match observed data presents a significant challenge. Simulation-based inference (SBI) addresses this by enabling Bayesian inference for simulators, identifying parameters that match observed data and align with prior knowledge. Unlike traditional Bayesian inference, SBI only needs access to simulations from the model and does not require evaluations of the likelihood-function. In addition, SBI algorithms do not require gradients through the simulator, allow for massive parallelization of simulations, and can perform inference for different observations without further simulations or training, thereby amortizing inference. Over the past years, we have developed, maintained, and extended $\texttt{sbi}$, a PyTorch-based package that implements Bayesian SBI algorithms based on neural networks. The $\texttt{sbi}$ toolkit implements a wide range of inference methods, neural network architectures, sampling methods, and diagnostic tools. In addition, it provides well-tested default settings but also offers flexibility to fully customize every step of the simulation-based inference workflow. Taken together, the $\texttt{sbi}$ toolkit enables scientists and engineers to apply state-of-the-art SBI methods to black-box simulators, opening up new possibilities for aligning simulations with empirically observed data.
Analysing the Interplay of Vision and Touch for Dexterous Insertion Tasks
Oct 31, 2024Robotic insertion tasks remain challenging due to uncertainties in perception and the need for precise control, particularly in unstructured environments. While humans seamlessly combine vision and touch for such tasks, effectively integrating these modalities in robotic systems is still an open problem. Our work presents an extensive analysis of the interplay between visual and tactile feedback during dexterous insertion tasks, showing that tactile sensing can greatly enhance success rates on challenging insertions with tight tolerances and varied hole orientations that vision alone cannot solve. These findings provide valuable insights for designing more effective multi-modal robotic control systems and highlight the critical role of tactile feedback in contact-rich manipulation tasks.
Machine Learning with Physics Knowledge for Prediction: A Survey
Aug 19, 2024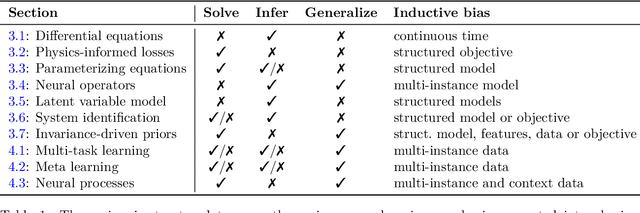
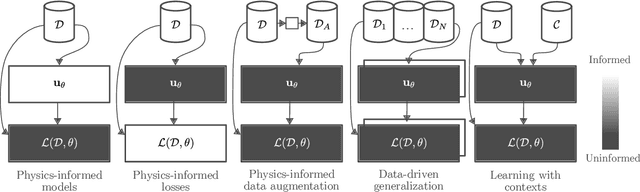
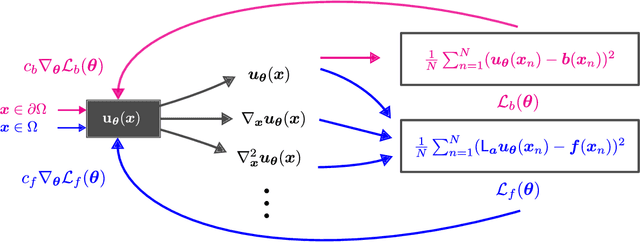
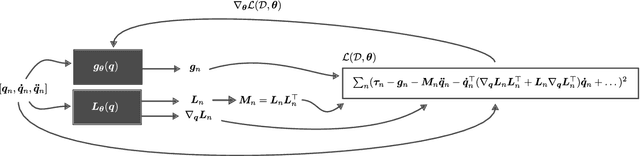
This survey examines the broad suite of methods and models for combining machine learning with physics knowledge for prediction and forecast, with a focus on partial differential equations. These methods have attracted significant interest due to their potential impact on advancing scientific research and industrial practices by improving predictive models with small- or large-scale datasets and expressive predictive models with useful inductive biases. The survey has two parts. The first considers incorporating physics knowledge on an architectural level through objective functions, structured predictive models, and data augmentation. The second considers data as physics knowledge, which motivates looking at multi-task, meta, and contextual learning as an alternative approach to incorporating physics knowledge in a data-driven fashion. Finally, we also provide an industrial perspective on the application of these methods and a survey of the open-source ecosystem for physics-informed machine learning.
Learning Tactile Insertion in the Real World
May 01, 2024


Humans have exceptional tactile sensing capabilities, which they can leverage to solve challenging, partially observable tasks that cannot be solved from visual observation alone. Research in tactile sensing attempts to unlock this new input modality for robots. Lately, these sensors have become cheaper and, thus, widely available. At the same time, the question of how to integrate them into control loops is still an active area of research, with central challenges being partial observability and the contact-rich nature of manipulation tasks. In this study, we propose to use Reinforcement Learning to learn an end-to-end policy, mapping directly from tactile sensor readings to actions. Specifically, we use Dreamer-v3 on a challenging, partially observable robotic insertion task with a Franka Research 3, both in simulation and on a real system. For the real setup, we built a robotic platform capable of resetting itself fully autonomously, allowing for extensive training runs without human supervision. Our preliminary results indicate that Dreamer is capable of utilizing tactile inputs to solve robotic manipulation tasks in simulation and reality. Furthermore, we find that providing the robot with tactile feedback generally improves task performance, though, in our setup, we do not yet include other sensing modalities. In the future, we plan to utilize our platform to evaluate a wide range of other Reinforcement Learning algorithms on tactile tasks.
Pseudo-Likelihood Inference
Nov 28, 2023Simulation-Based Inference (SBI) is a common name for an emerging family of approaches that infer the model parameters when the likelihood is intractable. Existing SBI methods either approximate the likelihood, such as Approximate Bayesian Computation (ABC) or directly model the posterior, such as Sequential Neural Posterior Estimation (SNPE). While ABC is efficient on low-dimensional problems, on higher-dimensional tasks, it is generally outperformed by SNPE, which leverages function approximation. In this paper, we propose Pseudo-Likelihood Inference (PLI), a new method that brings neural approximation into ABC, making it competitive on challenging Bayesian system identification tasks. By utilizing integral probability metrics, we introduce a smooth likelihood kernel with an adaptive bandwidth that is updated based on information-theoretic trust regions. Thanks to this formulation, our method (i) allows for optimizing neural posteriors via gradient descent, (ii) does not rely on summary statistics, and (iii) enables multiple observations as input. In comparison to SNPE, it leads to improved performance when more data is available. The effectiveness of PLI is evaluated on four classical SBI benchmark tasks and on a highly dynamic physical system, showing particular advantages on stochastic simulations and multi-modal posterior landscapes.