 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Adaptive Backstepping Impedance Control of Robots in Unknown Environments
Apr 10, 2026This paper presents a Robust Adaptive Backstepping Impedance Control (RABIC) strategy for robots operating in contact-rich and uncertain environments. The proposed control strategy considers the complete coupled dynamics of the system and explicitly accounts for key sources of uncertainty, including external disturbances and unmodeled dynamics, while not requiring the robot's dynamic parameters in implementation. We propose a backstepping-based adaptive impedance control scheme for the inner loop to track the reference impedance model. To handle uncertainties, we employ a Taylor series-based estimator for system dynamics and an adaptive estimator for determining the upper bound of external forces. Stability analysis demonstrates the semi-global practical finite-time stability of the overall system. To demonstrate the effectiveness of the proposed method, a simulated mobile manipulator scenario and experimental evaluations on a real Franka Emika Panda robot were conducted. The proposed approach exhibits safer performance compared to PD control while ensuring trajectory tracking and force monitoring. Overall, the RABIC framework provides a solid basis for future research on adaptive and learning-based impedance control for coupled mobile and fixed serially linked manipulators.
Task-Aware Bimanual Affordance Prediction via VLM-Guided Semantic-Geometric Reasoning
Apr 09, 2026Bimanual manipulation requires reasoning about where to interact with an object and which arm should perform each action, a joint affordance localization and arm allocation problem that geometry-only planners cannot resolve without semantic understanding of task intent. Existing approaches either treat affordance prediction as coarse part segmentation or rely on geometric heuristics for arm assignment, failing to jointly reason about task-relevant contact regions and arm allocation. We reframe bimanual manipulation as a joint affordance localization and arm allocation problem and propose a hierarchical framework for task-aware bimanual affordance prediction that leverages a Vision-Language Model (VLM) to generalize across object categories and task descriptions without requiring category-specific training. Our approach fuses multi-view RGB-D observations into a consistent 3D scene representation and generates global 6-DoF grasp candidates, which are then spatially and semantically filtered by querying the VLM for task-relevant affordance regions on each object, as well as for arm allocation to the individual objects, thereby ensuring geometric validity while respecting task semantics. We evaluate our method on a dual-arm platform across nine real-world manipulation tasks spanning four categories: parallel manipulation, coordinated stabilization, tool use, and human handover. Our approach achieves consistently higher task success rates than geometric and semantic baselines for task-oriented grasping, demonstrating that explicit semantic reasoning over affordances and arm allocation helps enable reliable bimanual manipulation in unstructured environments.
Investigating the Effect of LED Signals and Emotional Displays in Human-Robot Shared Workspaces
Sep 18, 2025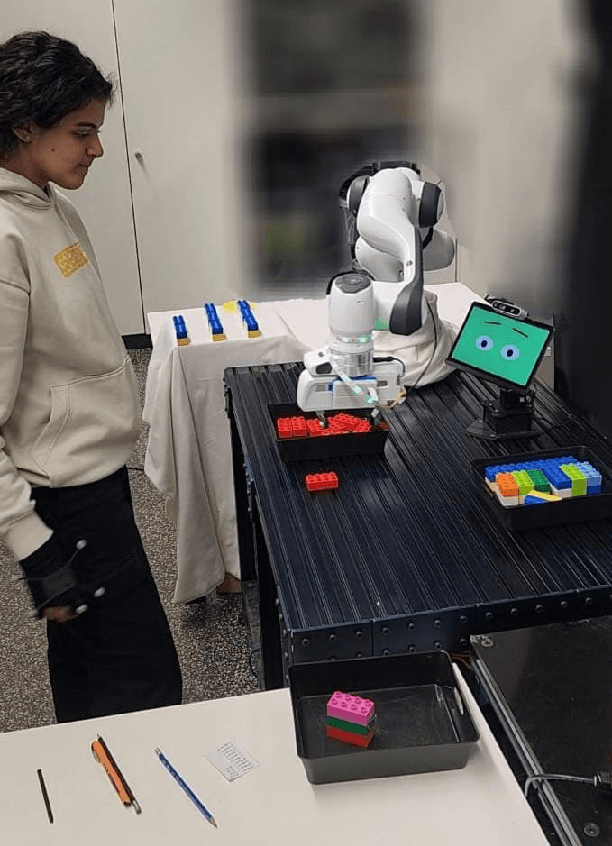
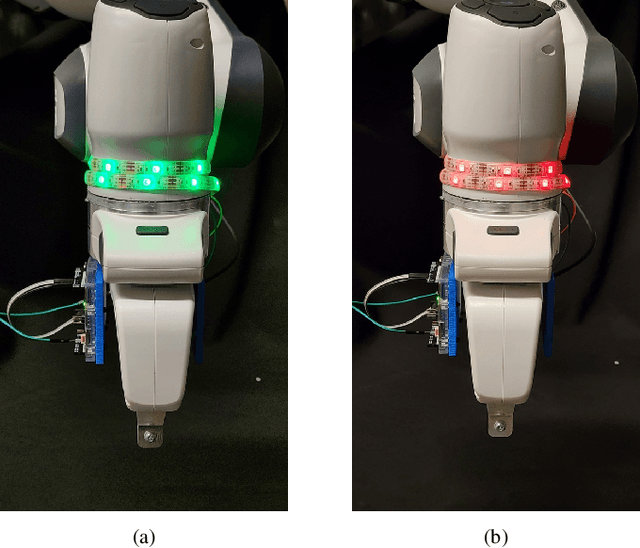
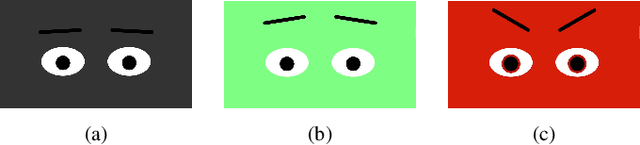
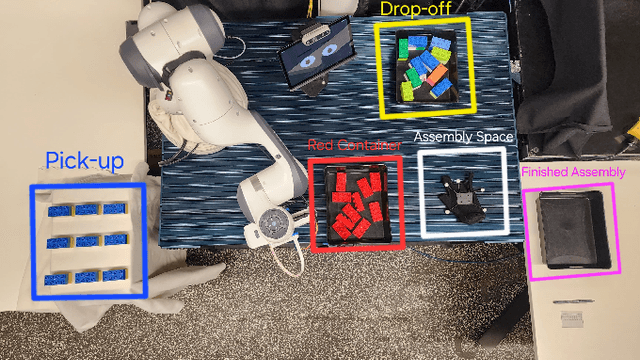
Effective communication is essential for safety and efficiency in human-robot collaboration, particularly in shared workspaces. This paper investigates the impact of nonverbal communication on human-robot interaction (HRI) by integrating reactive light signals and emotional displays into a robotic system. We equipped a Franka Emika Panda robot with an LED strip on its end effector and an animated facial display on a tablet to convey movement intent through colour-coded signals and facial expressions. We conducted a human-robot collaboration experiment with 18 participants, evaluating three conditions: LED signals alone, LED signals with reactive emotional displays, and LED signals with pre-emptive emotional displays. We collected data through questionnaires and position tracking to assess anticipation of potential collisions, perceived clarity of communication, and task performance. The results indicate that while emotional displays increased the perceived interactivity of the robot, they did not significantly improve collision anticipation, communication clarity, or task efficiency compared to LED signals alone. These findings suggest that while emotional cues can enhance user engagement, their impact on task performance in shared workspaces is limited.
In-Hand Object Pose Estimation via Visual-Tactile Fusion
Jun 12, 2025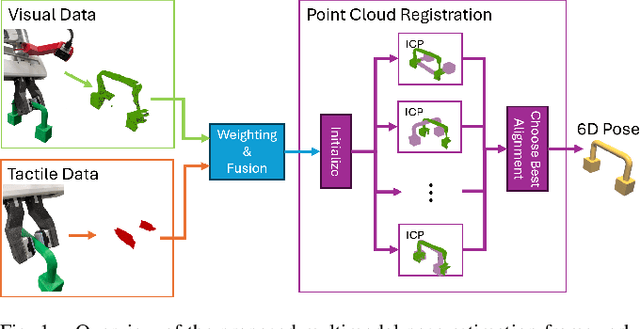
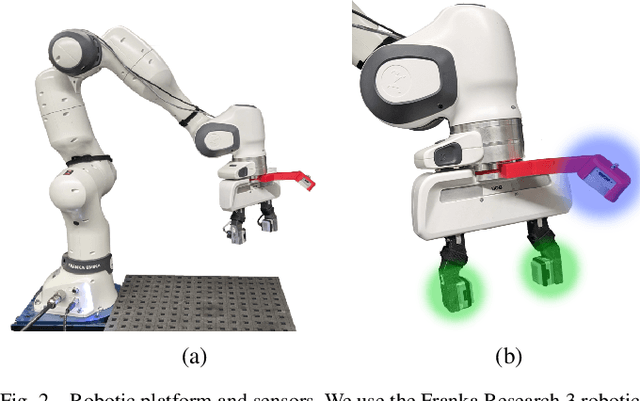
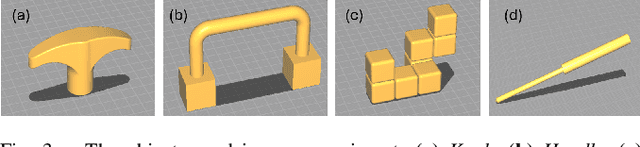
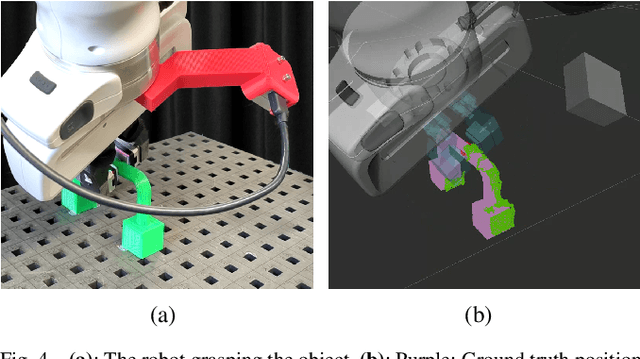
Accurate in-hand pose estimation is crucial for robotic object manipulation, but visual occlusion remains a major challenge for vision-based approaches. This paper presents an approach to robotic in-hand object pose estimation, combining visual and tactile information to accurately determine the position and orientation of objects grasped by a robotic hand. We address the challenge of visual occlusion by fusing visual information from a wrist-mounted RGB-D camera with tactile information from vision-based tactile sensors mounted on the fingertips of a robotic gripper. Our approach employs a weighting and sensor fusion module to combine point clouds from heterogeneous sensor types and control each modality's contribution to the pose estimation process. We use an augmented Iterative Closest Point (ICP) algorithm adapted for weighted point clouds to estimate the 6D object pose. Our experiments show that incorporating tactile information significantly improves pose estimation accuracy, particularly when occlusion is high. Our method achieves an average pose estimation error of 7.5 mm and 16.7 degrees, outperforming vision-only baselines by up to 20%. We also demonstrate the ability of our method to perform precise object manipulation in a real-world insertion task.
Investigating Active Sampling for Hardness Classification with Vision-Based Tactile Sensors
May 19, 2025One of the most important object properties that humans and robots perceive through touch is hardness. This paper investigates information-theoretic active sampling strategies for sample-efficient hardness classification with vision-based tactile sensors. We evaluate three probabilistic classifier models and two model-uncertainty-based sampling strategies on a robotic setup as well as on a previously published dataset of samples collected by human testers. Our findings indicate that the active sampling approaches, driven by uncertainty metrics, surpass a random sampling baseline in terms of accuracy and stability. Additionally, while in our human study, the participants achieve an average accuracy of 48.00%, our best approach achieves an average accuracy of 88.78% on the same set of objects, demonstrating the effectiveness of vision-based tactile sensors for object hardness classification.
TacEx: GelSight Tactile Simulation in Isaac Sim -- Combining Soft-Body and Visuotactile Simulators
Nov 07, 2024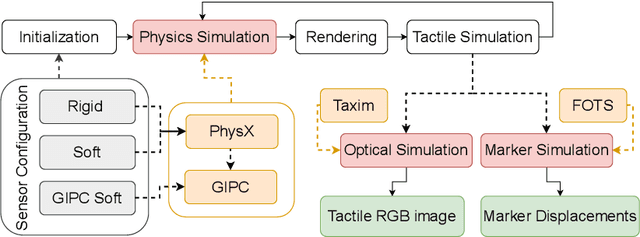
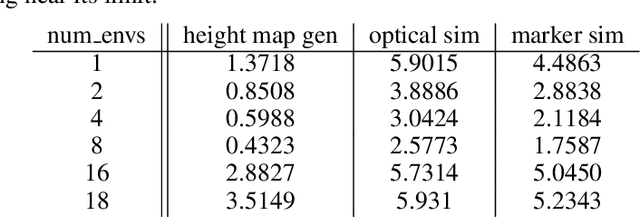
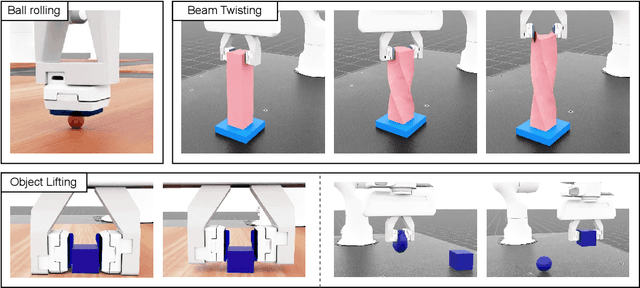

Training robot policies in simulation is becoming increasingly popular; nevertheless, a precise, reliable, and easy-to-use tactile simulator for contact-rich manipulation tasks is still missing. To close this gap, we develop TacEx -- a modular tactile simulation framework. We embed a state-of-the-art soft-body simulator for contacts named GIPC and vision-based tactile simulators Taxim and FOTS into Isaac Sim to achieve robust and plausible simulation of the visuotactile sensor GelSight Mini. We implement several Isaac Lab environments for Reinforcement Learning (RL) leveraging our TacEx simulation, including object pushing, lifting, and pole balancing. We validate that the simulation is stable and that the high-dimensional observations, such as the gel deformation and the RGB images from the GelSight camera, can be used for training. The code, videos, and additional results will be released online https://sites.google.com/view/tacex.
MoVEInt: Mixture of Variational Experts for Learning Human-Robot Interactions from Demonstrations
Jul 10, 2024Shared dynamics models are important for capturing the complexity and variability inherent in Human-Robot Interaction (HRI). Therefore, learning such shared dynamics models can enhance coordination and adaptability to enable successful reactive interactions with a human partner. In this work, we propose a novel approach for learning a shared latent space representation for HRIs from demonstrations in a Mixture of Experts fashion for reactively generating robot actions from human observations. We train a Variational Autoencoder (VAE) to learn robot motions regularized using an informative latent space prior that captures the multimodality of the human observations via a Mixture Density Network (MDN). We show how our formulation derives from a Gaussian Mixture Regression formulation that is typically used approaches for learning HRI from demonstrations such as using an HMM/GMM for learning a joint distribution over the actions of the human and the robot. We further incorporate an additional regularization to prevent "mode collapse", a common phenomenon when using latent space mixture models with VAEs. We find that our approach of using an informative MDN prior from human observations for a VAE generates more accurate robot motions compared to previous HMM-based or recurrent approaches of learning shared latent representations, which we validate on various HRI datasets involving interactions such as handshakes, fistbumps, waving, and handovers. Further experiments in a real-world human-to-robot handover scenario show the efficacy of our approach for generating successful interactions with four different human interaction partners.
What Matters for Active Texture Recognition With Vision-Based Tactile Sensors
Mar 20, 2024This paper explores active sensing strategies that employ vision-based tactile sensors for robotic perception and classification of fabric textures. We formalize the active sampling problem in the context of tactile fabric recognition and provide an implementation of information-theoretic exploration strategies based on minimizing predictive entropy and variance of probabilistic models. Through ablation studies and human experiments, we investigate which components are crucial for quick and reliable texture recognition. Along with the active sampling strategies, we evaluate neural network architectures, representations of uncertainty, influence of data augmentation, and dataset variability. By evaluating our method on a previously published Active Clothing Perception Dataset and on a real robotic system, we establish that the choice of the active exploration strategy has only a minor influence on the recognition accuracy, whereas data augmentation and dropout rate play a significantly larger role. In a comparison study, while humans achieve 66.9% recognition accuracy, our best approach reaches 90.0% in under 5 touches, highlighting that vision-based tactile sensors are highly effective for fabric texture recognition.
Kinematically Constrained Human-like Bimanual Robot-to-Human Handovers
Feb 22, 2024

Bimanual handovers are crucial for transferring large, deformable or delicate objects. This paper proposes a framework for generating kinematically constrained human-like bimanual robot motions to ensure seamless and natural robot-to-human object handovers. We use a Hidden Semi-Markov Model (HSMM) to reactively generate suitable response trajectories for a robot based on the observed human partner's motion. The trajectories are adapted with task space constraints to ensure accurate handovers. Results from a pilot study show that our approach is perceived as more human--like compared to a baseline Inverse Kinematics approach.
Transition State Clustering for Interaction Segmentation and Learning
Feb 22, 2024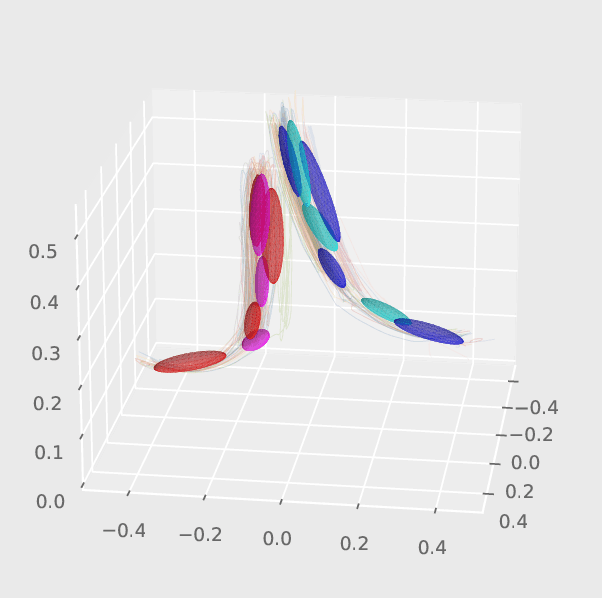

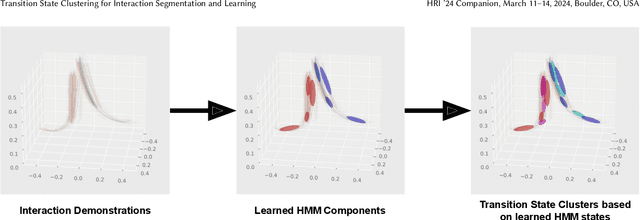
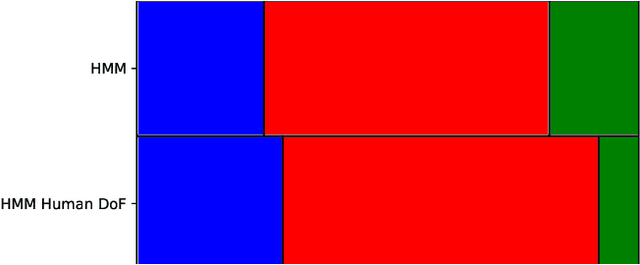
Hidden Markov Models with an underlying Mixture of Gaussian structure have proven effective in learning Human-Robot Interactions from demonstrations for various interactive tasks via Gaussian Mixture Regression. However, a mismatch occurs when segmenting the interaction using only the observed state of the human compared to the joint state of the human and the robot. To enhance this underlying segmentation and subsequently the predictive abilities of such Gaussian Mixture-based approaches, we take a hierarchical approach by learning an additional mixture distribution on the states at the transition boundary. This helps prevent misclassifications that usually occur in such states. We find that our framework improves the performance of the underlying Gaussian Mixture-based approach, which we evaluate on various interactive tasks such as handshaking and fistbumps.