 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTransition State Clustering for Interaction Segmentation and Learning
Feb 22, 2024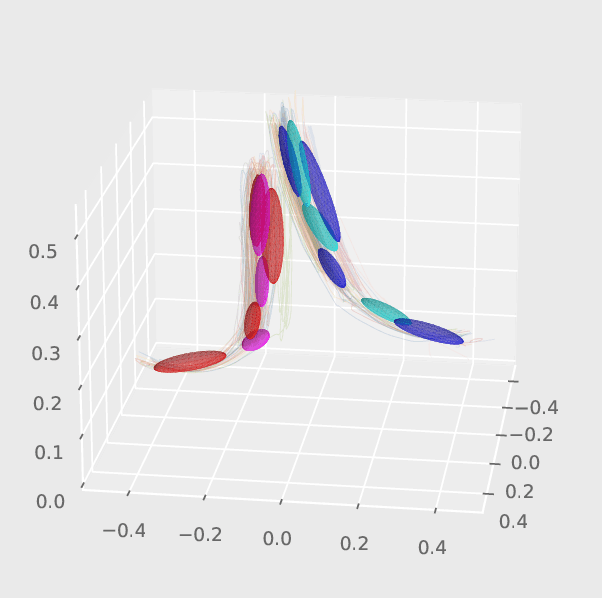

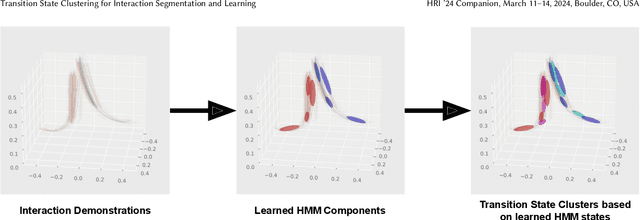
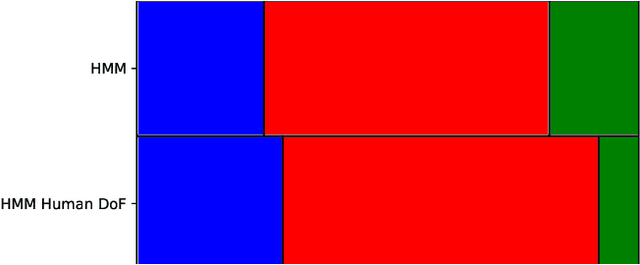
Hidden Markov Models with an underlying Mixture of Gaussian structure have proven effective in learning Human-Robot Interactions from demonstrations for various interactive tasks via Gaussian Mixture Regression. However, a mismatch occurs when segmenting the interaction using only the observed state of the human compared to the joint state of the human and the robot. To enhance this underlying segmentation and subsequently the predictive abilities of such Gaussian Mixture-based approaches, we take a hierarchical approach by learning an additional mixture distribution on the states at the transition boundary. This helps prevent misclassifications that usually occur in such states. We find that our framework improves the performance of the underlying Gaussian Mixture-based approach, which we evaluate on various interactive tasks such as handshaking and fistbumps.
Facial emotion expressions in human-robot interaction: A survey
Mar 12, 2021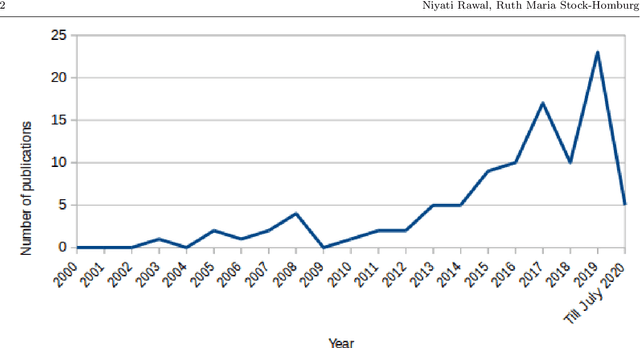
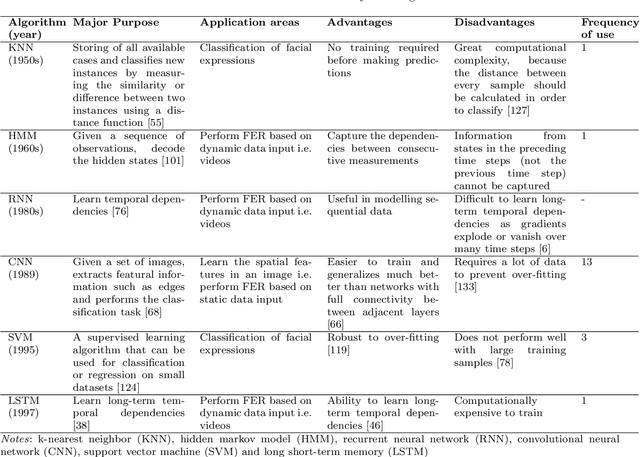
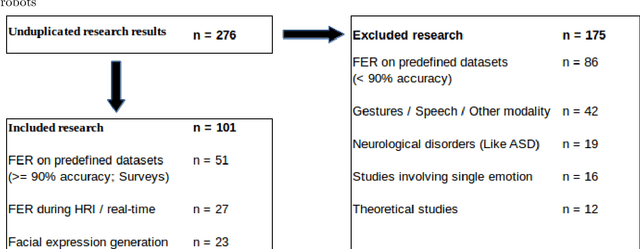
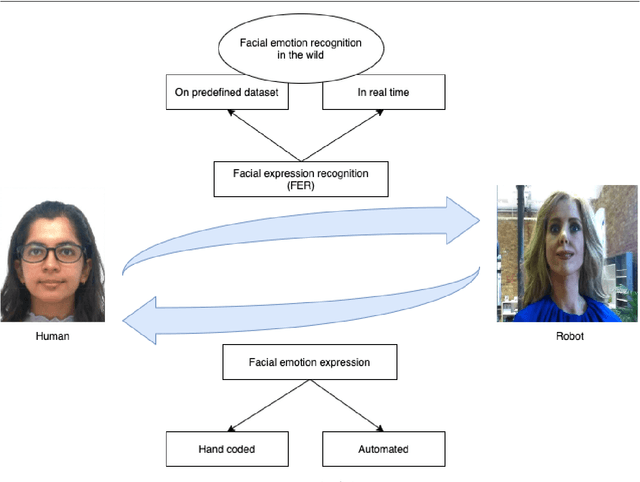
Facial expressions are an ideal means of communicating one's emotions or intentions to others. This overview will focus on human facial expression recognition as well as robotic facial expression generation. In case of human facial expression recognition, both facial expression recognition on predefined datasets as well as in real time will be covered. For robotic facial expression generation, hand coded and automated methods i.e., facial expressions of a robot are generated by moving the features (eyes, mouth) of the robot by hand coding or automatically using machine learning techniques, will also be covered. There are already plenty of studies that achieve high accuracy for emotion expression recognition on predefined datasets, but the accuracy for facial expression recognition in real time is comparatively lower. In case of expression generation in robots, while most of the robots are capable of making basic facial expressions, there are not many studies that enable robots to do so automatically.