 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKinematically Constrained Human-like Bimanual Robot-to-Human Handovers
Feb 22, 2024

Bimanual handovers are crucial for transferring large, deformable or delicate objects. This paper proposes a framework for generating kinematically constrained human-like bimanual robot motions to ensure seamless and natural robot-to-human object handovers. We use a Hidden Semi-Markov Model (HSMM) to reactively generate suitable response trajectories for a robot based on the observed human partner's motion. The trajectories are adapted with task space constraints to ensure accurate handovers. Results from a pilot study show that our approach is perceived as more human--like compared to a baseline Inverse Kinematics approach.
Plug & Play Attacks: Towards Robust and Flexible Model Inversion Attacks
Feb 02, 2022
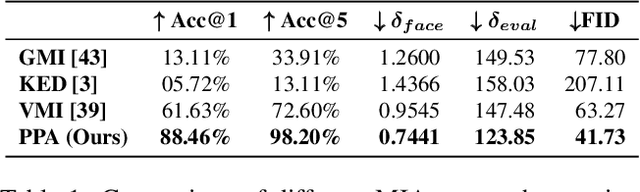

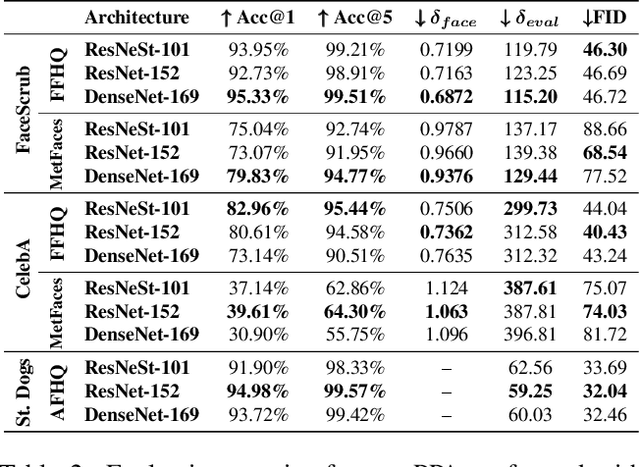
Model inversion attacks (MIAs) aim to create synthetic images that reflect the class-wise characteristics from a target classifier's training data by exploiting the model's learned knowledge. Previous research has developed generative MIAs using generative adversarial networks (GANs) as image priors that are tailored to a specific target model. This makes the attacks time- and resource-consuming, inflexible, and susceptible to distributional shifts between datasets. To overcome these drawbacks, we present Plug & Play Attacks that loosen the dependency between the target model and image prior and enable the use of a single trained GAN to attack a broad range of targets with only minor attack adjustments needed. Moreover, we show that powerful MIAs are possible even with publicly available pre-trained GANs and under strong distributional shifts, whereas previous approaches fail to produce meaningful results. Our extensive evaluation confirms the improved robustness and flexibility of Plug & Play Attacks and their ability to create high-quality images revealing sensitive class characteristics.