 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDevelopment of a Compliant Gripper for Safe Robot-Assisted Trouser Dressing-Undressing
Dec 10, 2025In recent years, many countries, including Japan, have rapidly aging populations, making the preservation of seniors' quality of life a significant concern. For elderly people with impaired physical abilities, support for toileting is one of the most important issues. This paper details the design, development, experimental assessment, and potential application of the gripper system, with a focus on the unique requirements and obstacles involved in aiding elderly or hemiplegic individuals in dressing and undressing trousers. The gripper we propose seeks to find the right balance between compliance and grasping forces, ensuring precise manipulation while maintaining a safe and compliant interaction with the users. The gripper's integration into a custom--built robotic manipulator system provides a comprehensive solution for assisting hemiplegic individuals in their dressing and undressing tasks. Experimental evaluations and comparisons with existing studies demonstrate the gripper's ability to successfully assist in both dressing and dressing of trousers in confined spaces with a high success rate. This research contributes to the advancement of assistive robotics, empowering elderly, and physically impaired individuals to maintain their independence and improve their quality of life.
LLMs-guided adaptive compensator: Bringing Adaptivity to Automatic Control Systems with Large Language Models
Jul 28, 2025With rapid advances in code generation, reasoning, and problem-solving, Large Language Models (LLMs) are increasingly applied in robotics. Most existing work focuses on high-level tasks such as task decomposition. A few studies have explored the use of LLMs in feedback controller design; however, these efforts are restricted to overly simplified systems, fixed-structure gain tuning, and lack real-world validation. To further investigate LLMs in automatic control, this work targets a key subfield: adaptive control. Inspired by the framework of model reference adaptive control (MRAC), we propose an LLM-guided adaptive compensator framework that avoids designing controllers from scratch. Instead, the LLMs are prompted using the discrepancies between an unknown system and a reference system to design a compensator that aligns the response of the unknown system with that of the reference, thereby achieving adaptivity. Experiments evaluate five methods: LLM-guided adaptive compensator, LLM-guided adaptive controller, indirect adaptive control, learning-based adaptive control, and MRAC, on soft and humanoid robots in both simulated and real-world environments. Results show that the LLM-guided adaptive compensator outperforms traditional adaptive controllers and significantly reduces reasoning complexity compared to the LLM-guided adaptive controller. The Lyapunov-based analysis and reasoning-path inspection demonstrate that the LLM-guided adaptive compensator enables a more structured design process by transforming mathematical derivation into a reasoning task, while exhibiting strong generalizability, adaptability, and robustness. This study opens a new direction for applying LLMs in the field of automatic control, offering greater deployability and practicality compared to vision-language models.
A Comprehensive Survey on Physical Risk Control in the Era of Foundation Model-enabled Robotics
May 19, 2025Recent Foundation Model-enabled robotics (FMRs) display greatly improved general-purpose skills, enabling more adaptable automation than conventional robotics. Their ability to handle diverse tasks thus creates new opportunities to replace human labor. However, unlike general foundation models, FMRs interact with the physical world, where their actions directly affect the safety of humans and surrounding objects, requiring careful deployment and control. Based on this proposition, our survey comprehensively summarizes robot control approaches to mitigate physical risks by covering all the lifespan of FMRs ranging from pre-deployment to post-accident stage. Specifically, we broadly divide the timeline into the following three phases: (1) pre-deployment phase, (2) pre-incident phase, and (3) post-incident phase. Throughout this survey, we find that there is much room to study (i) pre-incident risk mitigation strategies, (ii) research that assumes physical interaction with humans, and (iii) essential issues of foundation models themselves. We hope that this survey will be a milestone in providing a high-resolution analysis of the physical risks of FMRs and their control, contributing to the realization of a good human-robot relationship.
Enhancing the LLM-Based Robot Manipulation Through Human-Robot Collaboration
Jun 20, 2024Large Language Models (LLMs) are gaining popularity in the field of robotics. However, LLM-based robots are limited to simple, repetitive motions due to the poor integration between language models, robots, and the environment. This paper proposes a novel approach to enhance the performance of LLM-based autonomous manipulation through Human-Robot Collaboration (HRC). The approach involves using a prompted GPT-4 language model to decompose high-level language commands into sequences of motions that can be executed by the robot. The system also employs a YOLO-based perception algorithm, providing visual cues to the LLM, which aids in planning feasible motions within the specific environment. Additionally, an HRC method is proposed by combining teleoperation and Dynamic Movement Primitives (DMP), allowing the LLM-based robot to learn from human guidance. Real-world experiments have been conducted using the Toyota Human Support Robot for manipulation tasks. The outcomes indicate that tasks requiring complex trajectory planning and reasoning over environments can be efficiently accomplished through the incorporation of human demonstrations.
Integrating Visuo-tactile Sensing with Haptic Feedback for Teleoperated Robot Manipulation
Apr 30, 2024
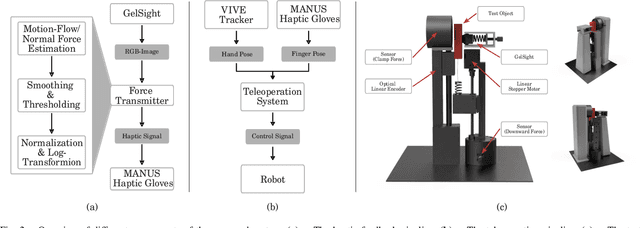
Telerobotics enables humans to overcome spatial constraints and allows them to physically interact with the environment in remote locations. However, the sensory feedback provided by the system to the operator is often purely visual, limiting the operator's dexterity in manipulation tasks. In this work, we address this issue by equipping the robot's end-effector with high-resolution visuotactile GelSight sensors. Using low-cost MANUS-Gloves, we provide the operator with haptic feedback about forces acting at the points of contact in the form of vibration signals. We propose two different methods for estimating these forces; one based on estimating the movement of markers on the sensor surface and one deep-learning approach. Additionally, we integrate our system into a virtual-reality teleoperation pipeline in which a human operator controls both arms of a Tiago robot while receiving visual and haptic feedback. We believe that integrating haptic feedback is a crucial step for dexterous manipulation in teleoperated robotic systems.
LLM-Based Human-Robot Collaboration Framework for Manipulation Tasks
Aug 29, 2023This paper presents a novel approach to enhance autonomous robotic manipulation using the Large Language Model (LLM) for logical inference, converting high-level language commands into sequences of executable motion functions. The proposed system combines the advantage of LLM with YOLO-based environmental perception to enable robots to autonomously make reasonable decisions and task planning based on the given commands. Additionally, to address the potential inaccuracies or illogical actions arising from LLM, a combination of teleoperation and Dynamic Movement Primitives (DMP) is employed for action correction. This integration aims to improve the practicality and generalizability of the LLM-based human-robot collaboration system.
Human Preferences and Robot Constraints Aware Shared Control for Smooth Follower Motion Execution
Jul 31, 2023With the continuous advancement of robot teleoperation technology, shared control is used to reduce the physical and mental load of the operator in teleoperation system. This paper proposes an alternating shared control framework for object grasping that considers both operator's preferences through their manual manipulation and the constraints of the follower robot. The switching between manual mode and automatic mode enables the operator to intervene the task according to their wishes. The generation of the grasping pose takes into account the current state of the operator's hand pose, as well as the manipulability of the robot. The object grasping experiment indicates that the use of the proposed grasping pose selection strategy leads to smoother follower movements when switching from manual mode to automatic mode.
Cutaneous Feedback Interface for Teleoperated In-Hand Manipulation
Mar 06, 2023



In-hand pivoting is one of the important manipulation skills that leverage robot grippers' extrinsic dexterity to perform repositioning tasks to compensate for environmental uncertainties and imprecise motion execution. Although many researchers have been trying to solve pivoting problems using mathematical modeling or learning-based approaches, the problems remain as open challenges. On the other hand, humans perform in-hand manipulation with remarkable precision and speed. Hence, the solution could be provided by making full use of this intrinsic human skill through dexterous teleoperation. For dexterous teleoperation to be successful, interfaces that enhance and complement haptic feedback are of great necessity. In this paper, we propose a cutaneous feedback interface that complements the somatosensory information humans rely on when performing dexterous skills. The interface is designed based on five-bar link mechanisms and provides two contact points in the index finger and thumb for cutaneous feedback. By integrating the interface with a commercially available haptic device, the system can display information such as grasping force, shear force, friction, and grasped object's pose. Passive pivoting tasks inside a numerical simulator Isaac Sim is conducted to evaluate the effect of the proposed cutaneous feedback interface.
* 7 pages, 10 figures, Accepted at 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
Visual Tactile Sensor Based Force Estimation for Position-Force Teleoperation
Dec 26, 2022Vision-based tactile sensors have gained extensive attention in the robotics community. The sensors are highly expected to be capable of extracting contact information i.e. haptic information during in-hand manipulation. This nature of tactile sensors makes them a perfect match for haptic feedback applications. In this paper, we propose a contact force estimation method using the vision-based tactile sensor DIGIT, and apply it to a position-force teleoperation architecture for force feedback. The force estimation is done by building a depth map for DIGIT gel surface deformation measurement and applying a regression algorithm on estimated depth data and ground truth force data to get the depth-force relationship. The experiment is performed by constructing a grasping force feedback system with a haptic device as a leader robot and a parallel robot gripper as a follower robot, where the DIGIT sensor is attached to the tip of the robot gripper to estimate the contact force. The preliminary results show the capability of using the low-cost vision-based sensor for force feedback applications.