 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHydroGym: A Reinforcement Learning Platform for Fluid Dynamics
Dec 19, 2025Modeling and controlling fluid flows is critical for several fields of science and engineering, including transportation, energy, and medicine. Effective flow control can lead to, e.g., lift increase, drag reduction, mixing enhancement, and noise reduction. However, controlling a fluid faces several significant challenges, including high-dimensional, nonlinear, and multiscale interactions in space and time. Reinforcement learning (RL) has recently shown great success in complex domains, such as robotics and protein folding, but its application to flow control is hindered by a lack of standardized benchmark platforms and the computational demands of fluid simulations. To address these challenges, we introduce HydroGym, a solver-independent RL platform for flow control research. HydroGym integrates sophisticated flow control benchmarks, scalable runtime infrastructure, and state-of-the-art RL algorithms. Our platform includes 42 validated environments spanning from canonical laminar flows to complex three-dimensional turbulent scenarios, validated over a wide range of Reynolds numbers. We provide non-differentiable solvers for traditional RL and differentiable solvers that dramatically improve sample efficiency through gradient-enhanced optimization. Comprehensive evaluation reveals that RL agents consistently discover robust control principles across configurations, such as boundary layer manipulation, acoustic feedback disruption, and wake reorganization. Transfer learning studies demonstrate that controllers learned at one Reynolds number or geometry adapt efficiently to new conditions, requiring approximately 50% fewer training episodes. The HydroGym platform is highly extensible and scalable, providing a framework for researchers in fluid dynamics, machine learning, and control to add environments, surrogate models, and control algorithms to advance science and technology.
From STLS to Projection-based Dictionary Selection in Sparse Regression for System Identification
Dec 16, 2025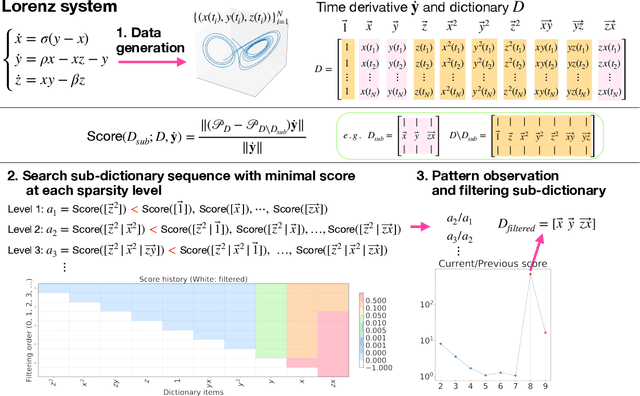
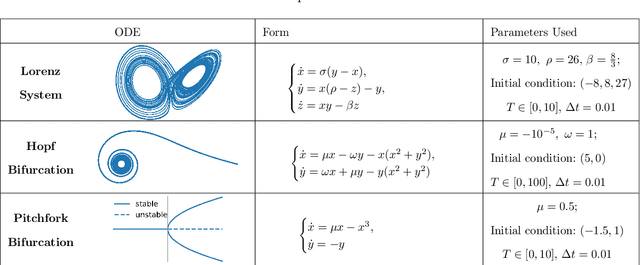
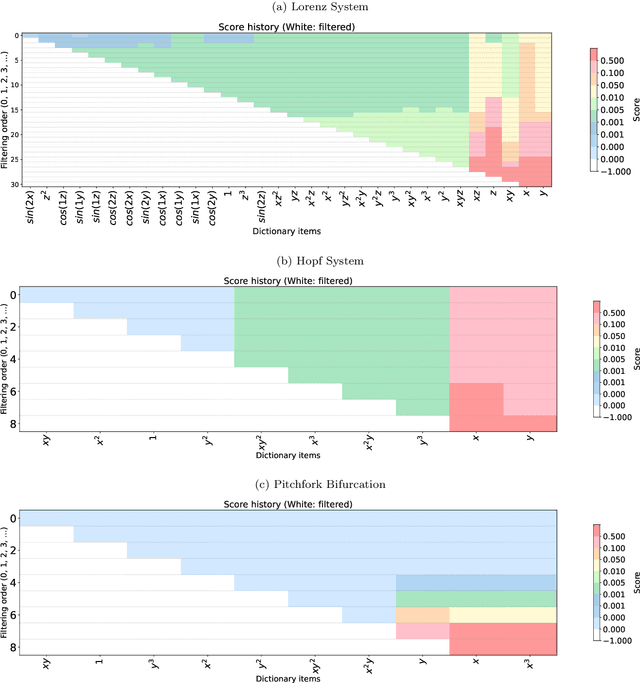
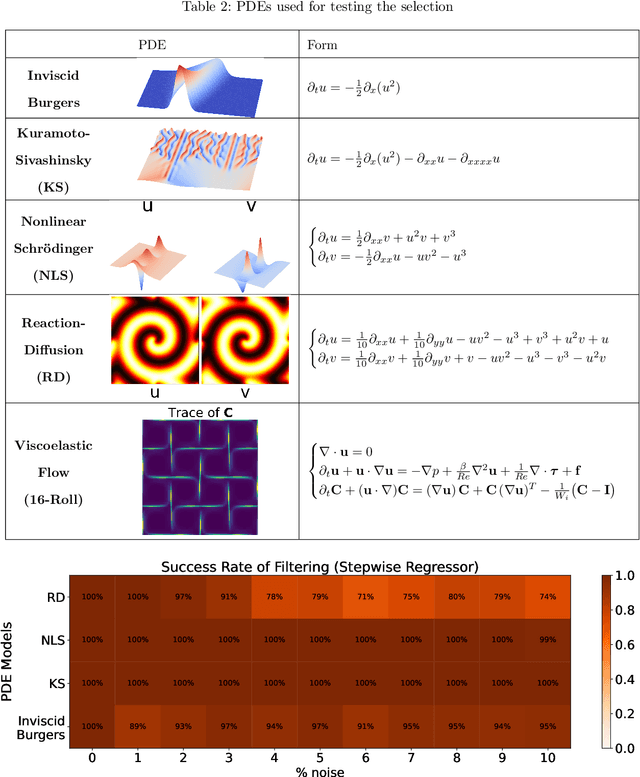
In this work, we revisit dictionary-based sparse regression, in particular, Sequential Threshold Least Squares (STLS), and propose a score-guided library selection to provide practical guidance for data-driven modeling, with emphasis on SINDy-type algorithms. STLS is an algorithm to solve the $\ell_0$ sparse least-squares problem, which relies on splitting to efficiently solve the least-squares portion while handling the sparse term via proximal methods. It produces coefficient vectors whose components depend on both the projected reconstruction errors, here referred to as the scores, and the mutual coherence of dictionary terms. The first contribution of this work is a theoretical analysis of the score and dictionary-selection strategy. This could be understood in both the original and weak SINDy regime. Second, numerical experiments on ordinary and partial differential equations highlight the effectiveness of score-based screening, improving both accuracy and interpretability in dynamical system identification. These results suggest that integrating score-guided methods to refine the dictionary more accurately may help SINDy users in some cases to enhance their robustness for data-driven discovery of governing equations.
Accelerating scientific discovery with the common task framework
Nov 06, 2025Machine learning (ML) and artificial intelligence (AI) algorithms are transforming and empowering the characterization and control of dynamic systems in the engineering, physical, and biological sciences. These emerging modeling paradigms require comparative metrics to evaluate a diverse set of scientific objectives, including forecasting, state reconstruction, generalization, and control, while also considering limited data scenarios and noisy measurements. We introduce a common task framework (CTF) for science and engineering, which features a growing collection of challenge data sets with a diverse set of practical and common objectives. The CTF is a critically enabling technology that has contributed to the rapid advance of ML/AI algorithms in traditional applications such as speech recognition, language processing, and computer vision. There is a critical need for the objective metrics of a CTF to compare the diverse algorithms being rapidly developed and deployed in practice today across science and engineering.
PySensors 2.0: A Python Package for Sparse Sensor Placement
Sep 09, 2025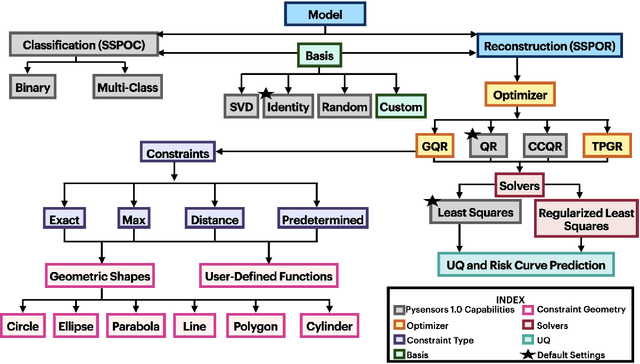
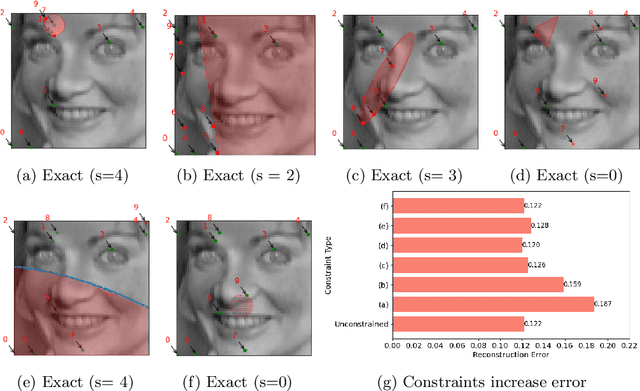
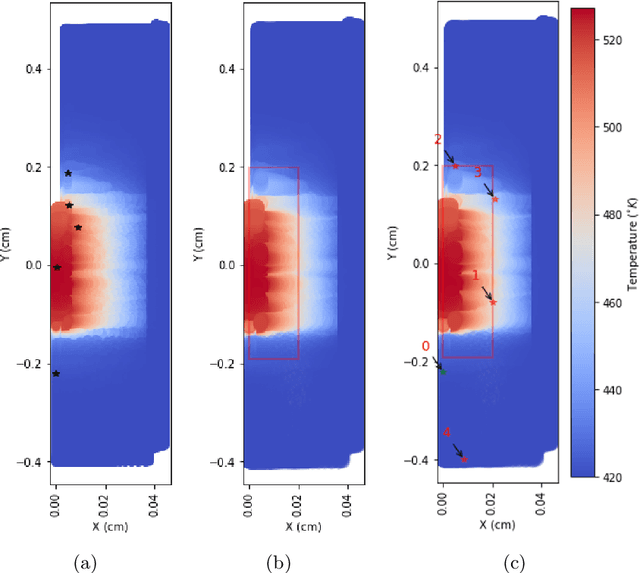
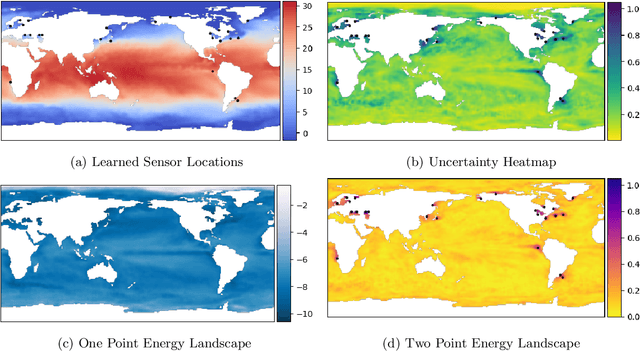
PySensors is a Python package for selecting and placing a sparse set of sensors for reconstruction and classification tasks. In this major update to \texttt{PySensors}, we introduce spatially constrained sensor placement capabilities, allowing users to enforce constraints such as maximum or exact sensor counts in specific regions, incorporate predetermined sensor locations, and maintain minimum distances between sensors. We extend functionality to support custom basis inputs, enabling integration of any data-driven or spectral basis. We also propose a thermodynamic approach that goes beyond a single ``optimal'' sensor configuration and maps the complete landscape of sensor interactions induced by the training data. This comprehensive view facilitates integration with external selection criteria and enables assessment of sensor replacement impacts. The new optimization technique also accounts for over- and under-sampling of sensors, utilizing a regularized least squares approach for robust reconstruction. Additionally, we incorporate noise-induced uncertainty quantification of the estimation error and provide visual uncertainty heat maps to guide deployment decisions. To highlight these additions, we provide a brief description of the mathematical algorithms and theory underlying these new capabilities. We demonstrate the usage of new features with illustrative code examples and include practical advice for implementation across various application domains. Finally, we outline a roadmap of potential extensions to further enhance the package's functionality and applicability to emerging sensing challenges.
Computed tomography using meta-optics
Nov 13, 2024



Computer vision tasks require processing large amounts of data to perform image classification, segmentation, and feature extraction. Optical preprocessors can potentially reduce the number of floating point operations required by computer vision tasks, enabling low-power and low-latency operation. However, existing optical preprocessors are mostly learned and hence strongly depend on the training data, and thus lack universal applicability. In this paper, we present a metaoptic imager, which implements the Radon transform obviating the need for training the optics. High quality image reconstruction with a large compression ratio of 0.6% is presented through the use of the Simultaneous Algebraic Reconstruction Technique. Image classification with 90% accuracy is presented on an experimentally measured Radon dataset through neural network trained on digitally transformed images.
A deep learning approach to wall-shear stress quantification: From numerical training to zero-shot experimental application
Sep 05, 2024The accurate quantification of wall-shear stress dynamics is of substantial importance for various applications in fundamental and applied research, spanning areas from human health to aircraft design and optimization. Despite significant progress in experimental measurement techniques and post-processing algorithms, temporally resolved wall-shear stress dynamics with adequate spatial resolution and within a suitable spatial domain remain an elusive goal. To address this gap, we introduce a deep learning architecture that ingests wall-parallel velocity fields from the logarithmic layer of turbulent wall-bounded flows and outputs the corresponding 2D wall-shear stress fields with identical spatial resolution and domain size. From a physical perspective, our framework acts as a surrogate model encapsulating the various mechanisms through which highly energetic outer-layer flow structures influence the governing wall-shear stress dynamics. The network is trained in a supervised fashion on a unified dataset comprising direct numerical simulations of statistically 1D turbulent channel and spatially developing turbulent boundary layer flows at friction Reynolds numbers ranging from 390 to 1,500. We demonstrate a zero-shot applicability to experimental velocity fields obtained from Particle-Image Velocimetry measurements and verify the physical accuracy of the wall-shear stress estimates with synchronized wall-shear stress measurements using the Micro-Pillar Shear-Stress Sensor for Reynolds numbers up to 2,000. In summary, the presented framework lays the groundwork for extracting inaccessible experimental wall-shear stress information from readily available velocity measurements and thus, facilitates advancements in a variety of experimental applications.
Estimating Dynamic Flow Features in Groups of Tracked Objects
Aug 29, 2024



Interpreting motion captured in image sequences is crucial for a wide range of computer vision applications. Typical estimation approaches include optical flow (OF), which approximates the apparent motion instantaneously in a scene, and multiple object tracking (MOT), which tracks the motion of subjects over time. Often, the motion of objects in a scene is governed by some underlying dynamical system which could be inferred by analyzing the motion of groups of objects. Standard motion analyses, however, are not designed to intuit flow dynamics from trajectory data, making such measurements difficult in practice. The goal of this work is to extend gradient-based dynamical systems analyses to real-world applications characterized by complex, feature-rich image sequences with imperfect tracers. The tracer trajectories are tracked using deep vision networks and gradients are approximated using Lagrangian gradient regression (LGR), a tool designed to estimate spatial gradients from sparse data. From gradients, dynamical features such as regions of coherent rotation and transport barriers are identified. The proposed approach is affordably implemented and enables advanced studies including the motion analysis of two distinct object classes in a single image sequence. Two examples of the method are presented on data sets for which standard gradient-based analyses do not apply.
VENI, VINDy, VICI: a variational reduced-order modeling framework with uncertainty quantification
May 31, 2024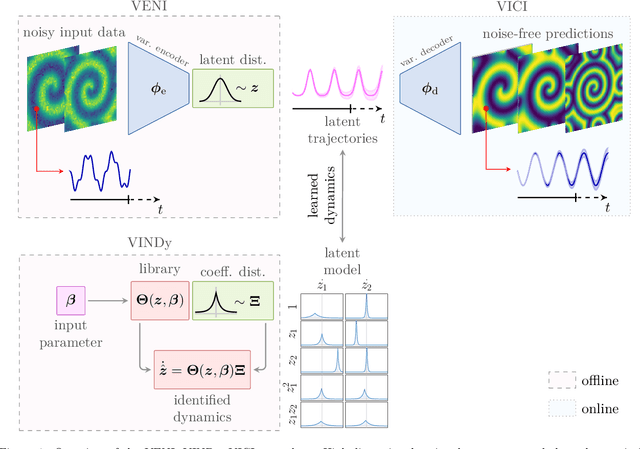
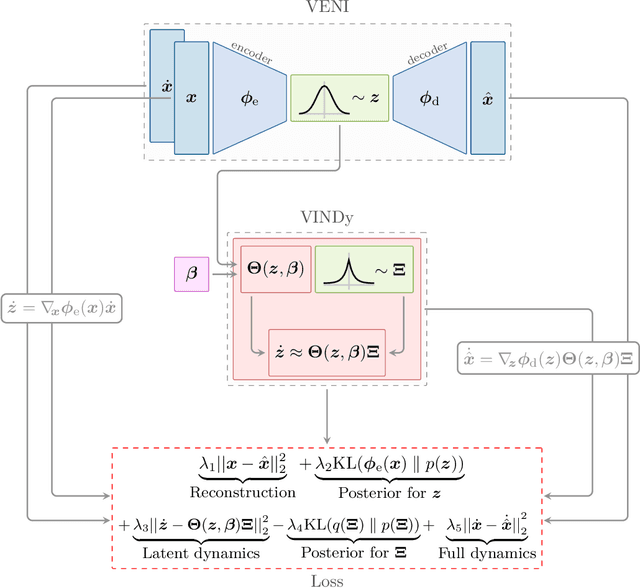
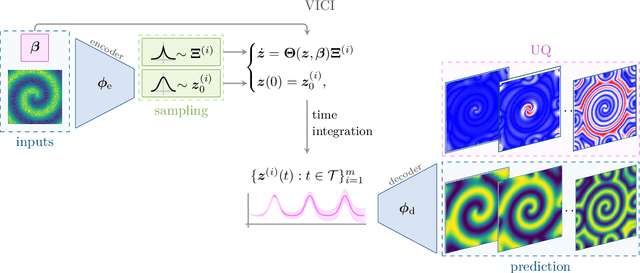
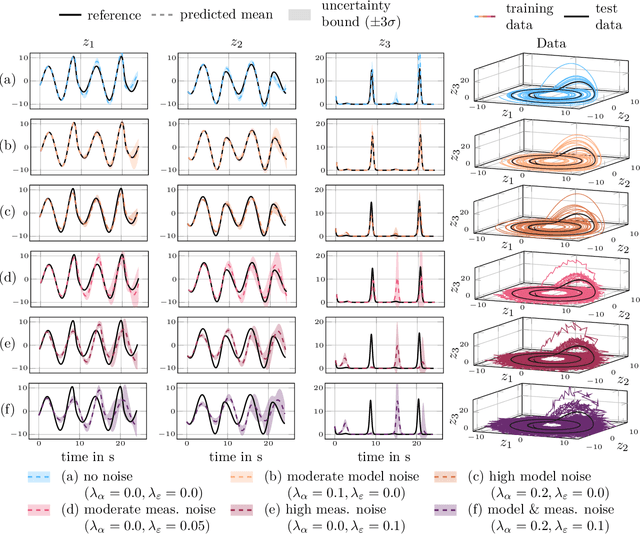
The simulation of many complex phenomena in engineering and science requires solving expensive, high-dimensional systems of partial differential equations (PDEs). To circumvent this, reduced-order models (ROMs) have been developed to speed up computations. However, when governing equations are unknown or partially known, typically ROMs lack interpretability and reliability of the predicted solutions. In this work we present a data-driven, non-intrusive framework for building ROMs where the latent variables and dynamics are identified in an interpretable manner and uncertainty is quantified. Starting from a limited amount of high-dimensional, noisy data the proposed framework constructs an efficient ROM by leveraging variational autoencoders for dimensionality reduction along with a newly introduced, variational version of sparse identification of nonlinear dynamics (SINDy), which we refer to as Variational Identification of Nonlinear Dynamics (VINDy). In detail, the method consists of Variational Encoding of Noisy Inputs (VENI) to identify the distribution of reduced coordinates. Simultaneously, we learn the distribution of the coefficients of a pre-determined set of candidate functions by VINDy. Once trained offline, the identified model can be queried for new parameter instances and new initial conditions to compute the corresponding full-time solutions. The probabilistic setup enables uncertainty quantification as the online testing consists of Variational Inference naturally providing Certainty Intervals (VICI). In this work we showcase the effectiveness of the newly proposed VINDy method in identifying interpretable and accurate dynamical system for the R\"ossler system with different noise intensities and sources. Then the performance of the overall method - named VENI, VINDy, VICI - is tested on PDE benchmarks including structural mechanics and fluid dynamics.
Opportunities for machine learning in scientific discovery
May 07, 2024Technological advancements have substantially increased computational power and data availability, enabling the application of powerful machine-learning (ML) techniques across various fields. However, our ability to leverage ML methods for scientific discovery, {\it i.e.} to obtain fundamental and formalized knowledge about natural processes, is still in its infancy. In this review, we explore how the scientific community can increasingly leverage ML techniques to achieve scientific discoveries. We observe that the applicability and opportunity of ML depends strongly on the nature of the problem domain, and whether we have full ({\it e.g.}, turbulence), partial ({\it e.g.}, computational biochemistry), or no ({\it e.g.}, neuroscience) {\it a-priori} knowledge about the governing equations and physical properties of the system. Although challenges remain, principled use of ML is opening up new avenues for fundamental scientific discoveries. Throughout these diverse fields, there is a theme that ML is enabling researchers to embrace complexity in observational data that was previously intractable to classic analysis and numerical investigations.
SINDy-RL: Interpretable and Efficient Model-Based Reinforcement Learning
Mar 14, 2024



Deep reinforcement learning (DRL) has shown significant promise for uncovering sophisticated control policies that interact in environments with complicated dynamics, such as stabilizing the magnetohydrodynamics of a tokamak fusion reactor or minimizing the drag force exerted on an object in a fluid flow. However, these algorithms require an abundance of training examples and may become prohibitively expensive for many applications. In addition, the reliance on deep neural networks often results in an uninterpretable, black-box policy that may be too computationally expensive to use with certain embedded systems. Recent advances in sparse dictionary learning, such as the sparse identification of nonlinear dynamics (SINDy), have shown promise for creating efficient and interpretable data-driven models in the low-data regime. In this work we introduce SINDy-RL, a unifying framework for combining SINDy and DRL to create efficient, interpretable, and trustworthy representations of the dynamics model, reward function, and control policy. We demonstrate the effectiveness of our approaches on benchmark control environments and challenging fluids problems. SINDy-RL achieves comparable performance to state-of-the-art DRL algorithms using significantly fewer interactions in the environment and results in an interpretable control policy orders of magnitude smaller than a deep neural network policy.