 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInterpretable and Efficient Data-driven Discovery and Control of Distributed Systems
Nov 06, 2024Effectively controlling systems governed by Partial Differential Equations (PDEs) is crucial in several fields of Applied Sciences and Engineering. These systems usually yield significant challenges to conventional control schemes due to their nonlinear dynamics, partial observability, high-dimensionality once discretized, distributed nature, and the requirement for low-latency feedback control. Reinforcement Learning (RL), particularly Deep RL (DRL), has recently emerged as a promising control paradigm for such systems, demonstrating exceptional capabilities in managing high-dimensional, nonlinear dynamics. However, DRL faces challenges including sample inefficiency, robustness issues, and an overall lack of interpretability. To address these issues, we propose a data-efficient, interpretable, and scalable Dyna-style Model-Based RL framework for PDE control, combining the Sparse Identification of Nonlinear Dynamics with Control (SINDy-C) algorithm and an autoencoder (AE) framework for the sake of dimensionality reduction of PDE states and actions. This novel approach enables fast rollouts, reducing the need for extensive environment interactions, and provides an interpretable latent space representation of the PDE forward dynamics. We validate our method on two PDE problems describing fluid flows - namely, the 1D Burgers equation and 2D Navier-Stokes equations - comparing it against a model-free baseline, and carrying out an extensive analysis of the learned dynamics.
Sparsifying Parametric Models with L0 Regularization
Sep 05, 2024This document contains an educational introduction to the problem of sparsifying parametric models with L0 regularization. We utilize this approach together with dictionary learning to learn sparse polynomial policies for deep reinforcement learning to control parametric partial differential equations. The code and a tutorial are provided here: https://github.com/nicob15/Sparsifying-Parametric-Models-with-L0.
Parametric PDE Control with Deep Reinforcement Learning and Differentiable L0-Sparse Polynomial Policies
Mar 22, 2024Optimal control of parametric partial differential equations (PDEs) is crucial in many applications in engineering and science. In recent years, the progress in scientific machine learning has opened up new frontiers for the control of parametric PDEs. In particular, deep reinforcement learning (DRL) has the potential to solve high-dimensional and complex control problems in a large variety of applications. Most DRL methods rely on deep neural network (DNN) control policies. However, for many dynamical systems, DNN-based control policies tend to be over-parametrized, which means they need large amounts of training data, show limited robustness, and lack interpretability. In this work, we leverage dictionary learning and differentiable L$_0$ regularization to learn sparse, robust, and interpretable control policies for parametric PDEs. Our sparse policy architecture is agnostic to the DRL method and can be used in different policy-gradient and actor-critic DRL algorithms without changing their policy-optimization procedure. We test our approach on the challenging tasks of controlling parametric Kuramoto-Sivashinsky and convection-diffusion-reaction PDEs. We show that our method (1) outperforms baseline DNN-based DRL policies, (2) allows for the derivation of interpretable equations of the learned optimal control laws, and (3) generalizes to unseen parameters of the PDE without retraining the policies.
SINDy-RL: Interpretable and Efficient Model-Based Reinforcement Learning
Mar 14, 2024



Deep reinforcement learning (DRL) has shown significant promise for uncovering sophisticated control policies that interact in environments with complicated dynamics, such as stabilizing the magnetohydrodynamics of a tokamak fusion reactor or minimizing the drag force exerted on an object in a fluid flow. However, these algorithms require an abundance of training examples and may become prohibitively expensive for many applications. In addition, the reliance on deep neural networks often results in an uninterpretable, black-box policy that may be too computationally expensive to use with certain embedded systems. Recent advances in sparse dictionary learning, such as the sparse identification of nonlinear dynamics (SINDy), have shown promise for creating efficient and interpretable data-driven models in the low-data regime. In this work we introduce SINDy-RL, a unifying framework for combining SINDy and DRL to create efficient, interpretable, and trustworthy representations of the dynamics model, reward function, and control policy. We demonstrate the effectiveness of our approaches on benchmark control environments and challenging fluids problems. SINDy-RL achieves comparable performance to state-of-the-art DRL algorithms using significantly fewer interactions in the environment and results in an interpretable control policy orders of magnitude smaller than a deep neural network policy.
Rapid Bayesian identification of sparse nonlinear dynamics from scarce and noisy data
Feb 23, 2024We propose a fast probabilistic framework for identifying differential equations governing the dynamics of observed data. We recast the SINDy method within a Bayesian framework and use Gaussian approximations for the prior and likelihood to speed up computation. The resulting method, Bayesian-SINDy, not only quantifies uncertainty in the parameters estimated but also is more robust when learning the correct model from limited and noisy data. Using both synthetic and real-life examples such as Lynx-Hare population dynamics, we demonstrate the effectiveness of the new framework in learning correct model equations and compare its computational and data efficiency with existing methods. Because Bayesian-SINDy can quickly assimilate data and is robust against noise, it is particularly suitable for biological data and real-time system identification in control. Its probabilistic framework also enables the calculation of information entropy, laying the foundation for an active learning strategy.
Benchmarking sparse system identification with low-dimensional chaos
Feb 04, 2023Sparse system identification is the data-driven process of obtaining parsimonious differential equations that describe the evolution of a dynamical system, balancing model complexity and accuracy. There has been rapid innovation in system identification across scientific domains, but there remains a gap in the literature for large-scale methodological comparisons that are evaluated on a variety of dynamical systems. In this work, we systematically benchmark sparse regression variants by utilizing the dysts standardized database of chaotic systems. In particular, we demonstrate how this open-source tool can be used to quantitatively compare different methods of system identification. To illustrate how this benchmark can be utilized, we perform a large comparison of four algorithms for solving the sparse identification of nonlinear dynamics (SINDy) optimization problem, finding strong performance of the original algorithm and a recent mixed-integer discrete algorithm. In all cases, we used ensembling to improve the noise robustness of SINDy and provide statistical comparisons. In addition, we show very compelling evidence that the weak SINDy formulation provides significant improvements over the traditional method, even on clean data. Lastly, we investigate how Pareto-optimal models generated from SINDy algorithms depend on the properties of the equations, finding that the performance shows no significant dependence on a set of dynamical properties that quantify the amount of chaos, scale separation, degree of nonlinearity, and the syntactic complexity.
Convergence of uncertainty estimates in Ensemble and Bayesian sparse model discovery
Jan 30, 2023Sparse model identification enables nonlinear dynamical system discovery from data. However, the control of false discoveries for sparse model identification is challenging, especially in the low-data and high-noise limit. In this paper, we perform a theoretical study on ensemble sparse model discovery, which shows empirical success in terms of accuracy and robustness to noise. In particular, we analyse the bootstrapping-based sequential thresholding least-squares estimator. We show that this bootstrapping-based ensembling technique can perform a provably correct variable selection procedure with an exponential convergence rate of the error rate. In addition, we show that the ensemble sparse model discovery method can perform computationally efficient uncertainty estimation, compared to expensive Bayesian uncertainty quantification methods via MCMC. We demonstrate the convergence properties and connection to uncertainty quantification in various numerical studies on synthetic sparse linear regression and sparse model discovery. The experiments on sparse linear regression support that the bootstrapping-based sequential thresholding least-squares method has better performance for sparse variable selection compared to LASSO, thresholding least-squares, and bootstrapping-based LASSO. In the sparse model discovery experiment, we show that the bootstrapping-based sequential thresholding least-squares method can provide valid uncertainty quantification, converging to a delta measure centered around the true value with increased sample sizes. Finally, we highlight the improved robustness to hyperparameter selection under shifting noise and sparsity levels of the bootstrapping-based sequential thresholding least-squares method compared to other sparse regression methods.
Robust, High-Rate Trajectory Tracking on Insect-Scale Soft-Actuated Aerial Robots with Deep-Learned Tube MPC
Sep 26, 2022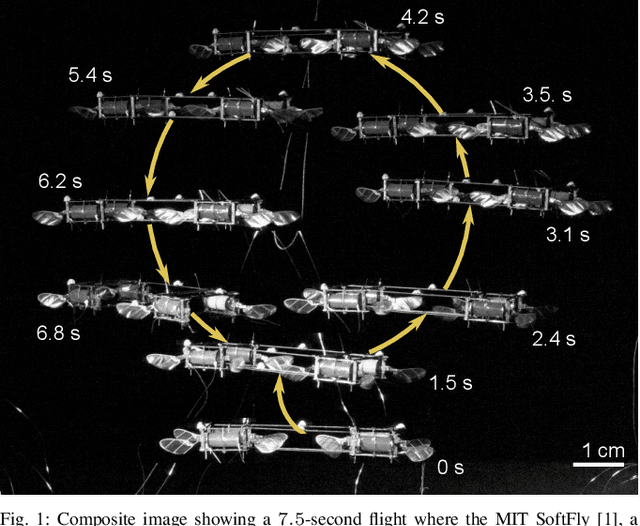
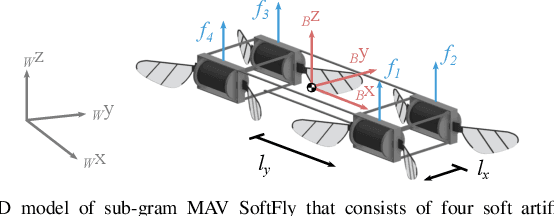
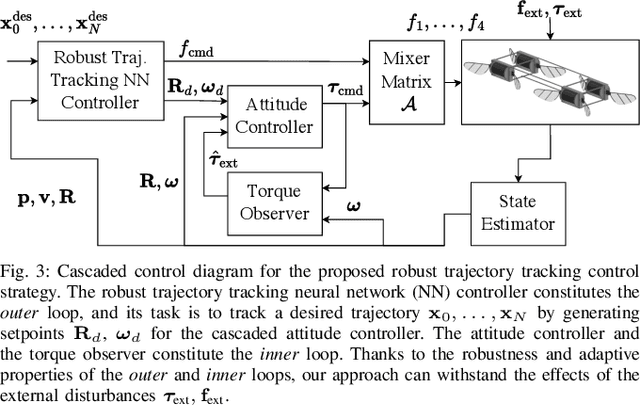
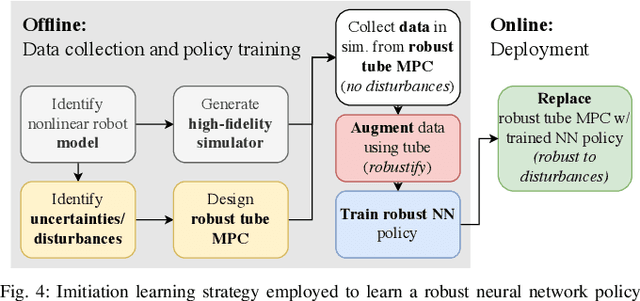
Accurate and agile trajectory tracking in sub-gram Micro Aerial Vehicles (MAVs) is challenging, as the small scale of the robot induces large model uncertainties, demanding robust feedback controllers, while the fast dynamics and computational constraints prevent the deployment of computationally expensive strategies. In this work, we present an approach for agile and computationally efficient trajectory tracking on the MIT SoftFly, a sub-gram MAV (0.7 grams). Our strategy employs a cascaded control scheme, where an adaptive attitude controller is combined with a neural network policy trained to imitate a trajectory tracking robust tube model predictive controller (RTMPC). The neural network policy is obtained using our recent work, which enables the policy to preserve the robustness of RTMPC, but at a fraction of its computational cost. We experimentally evaluate our approach, achieving position Root Mean Square Errors lower than 1.8 cm even in the more challenging maneuvers, obtaining a 60% reduction in maximum position error compared to our previous work, and demonstrating robustness to large external disturbances
The Experimental Multi-Arm Pendulum on a Cart: A Benchmark System for Chaos, Learning, and Control
May 12, 2022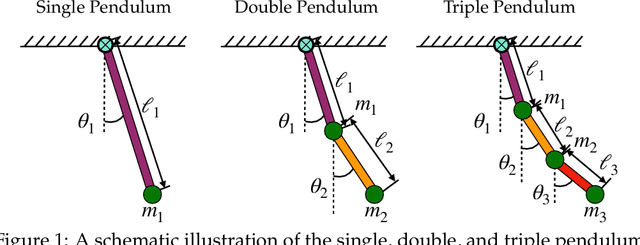
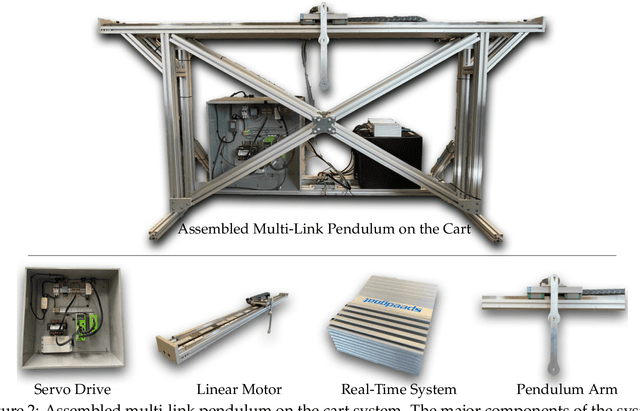
The single, double, and triple pendulum has served as an illustrative experimental benchmark system for scientists to study dynamical behavior for more than four centuries. The pendulum system exhibits a wide range of interesting behaviors, from simple harmonic motion in the single pendulum to chaotic dynamics in multi-arm pendulums. Under forcing, even the single pendulum may exhibit chaos, providing a simple example of a damped-driven system. All multi-armed pendulums are characterized by the existence of index-one saddle points, which mediate the transport of trajectories in the system, providing a simple mechanical analog of various complex transport phenomena, from biolocomotion to transport within the solar system. Further, pendulum systems have long been used to design and test both linear and nonlinear control strategies, with the addition of more arms making the problem more challenging. In this work, we provide extensive designs for the construction and operation of a high-performance, multi-link pendulum on a cart system. Although many experimental setups have been built to study the behavior of pendulum systems, such an extensive documentation on the design, construction, and operation is missing from the literature. The resulting experimental system is highly flexible, enabling a wide range of benchmark problems in dynamical systems modeling, system identification and learning, and control. To promote reproducible research, we have made our entire system open-source, including 3D CAD drawings, basic tutorial code, and data. Moreover, we discuss the possibility of extending our system capability to be operated remotely to enable researchers all around the world to use it, thus increasing access.
PySINDy: A comprehensive Python package for robust sparse system identification
Nov 12, 2021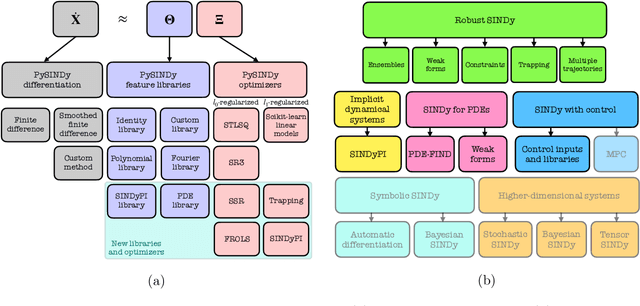
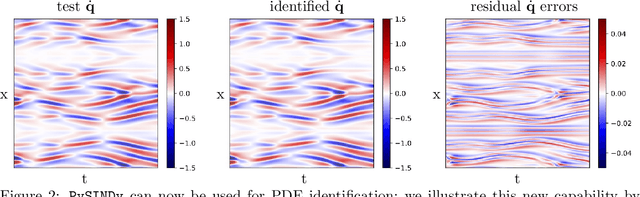
Automated data-driven modeling, the process of directly discovering the governing equations of a system from data, is increasingly being used across the scientific community. PySINDy is a Python package that provides tools for applying the sparse identification of nonlinear dynamics (SINDy) approach to data-driven model discovery. In this major update to PySINDy, we implement several advanced features that enable the discovery of more general differential equations from noisy and limited data. The library of candidate terms is extended for the identification of actuated systems, partial differential equations (PDEs), and implicit differential equations. Robust formulations, including the integral form of SINDy and ensembling techniques, are also implemented to improve performance for real-world data. Finally, we provide a range of new optimization algorithms, including several sparse regression techniques and algorithms to enforce and promote inequality constraints and stability. Together, these updates enable entirely new SINDy model discovery capabilities that have not been reported in the literature, such as constrained PDE identification and ensembling with different sparse regression optimizers.