 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEmergent Transfer of a Physics Foundation Model from Simulation to Laboratory Turbulence
May 31, 2026Whether physics foundation models can be usefully deployed on laboratory experiments remains an open question for scientific machine learning (ML). We test this question on the Rayleigh-Taylor instability (RTI), a ubiquitous and demanding fluid instability seen from tabletop flows to supernova explosions, in which small perturbations at a density interface grow into chaotic, multiscale mixing as a lighter fluid accelerates into a heavier one. Standard ML models struggle with RTI, and despite over a century of theoretical, numerical, and experimental work, it carries an unresolved discrepancy between simulation and experiment: the late-time mixing growth rate, $α$, measured in most laboratory experiments ($\sim$ 0.06-0.07), is roughly three times the value from idealized direct numerical simulations (DNS, $\sim$ 0.02). The gap's origin remains debated. These properties make RTI a stringent test for a question that matters well beyond RTI: can foundation models trained only on simulations generalise to sparse, messy, and noisy laboratory settings? We finetune Walrus, a foundation model for continuum dynamics, on three or fewer DNS realizations and recover key RTI physics over long rollouts. Applied zero-shot to sliding-barrier laboratory data, the finetuned model leaves the DNS-like regime and enters the observed growth band, having never seen a single experimental sample. These results provide independent, data-driven evidence that initial conditions play a crucial role in the longstanding sim-experiment gap in $α$. The model also generalises zero-shot to stable stratification, a buoyancy regime absent from training, correctly slowing mixing-layer growth. Together, our results show that foundation models can generalise well beyond their training data, predicting laboratory behavior and unseen physical regimes, opening new ways to probe longstanding simulation-experiment gaps.
MIMIC: A Generative Multimodal Foundation Model for Biomolecules
Apr 27, 2026Biological function emerges from coupled constraints across sequence, structure, regulation, evolution, and cellular context, yet most foundation models in biology are trained within one modality or for a fixed forward task. We present MIMIC, a generative multimodal foundation model trained on our newly curated and aligned dataset, LORE, linking nucleic acid, protein, evolutionary, structural, regulatory, and semantic/contextual modalities within partially observed biomolecular states. MIMIC uses a split-track encoder-decoder architecture to condition on arbitrary subsets of observed modalities and reconstruct or generate missing components of molecular state across the genome, transcriptome, and proteome. Multimodal conditioning consistently improves MIMIC's sequence reconstruction relative to sequence-only inputs, while its learned representations enable state-of-the-art performance on RNA and protein downstream tasks. MIMIC achieves state-of-the-art splicing prediction, and its joint generative formulation enables isoform-aware inference that further improves performance. Beyond prediction, the same generative framework supports constrained design. For RNA, MIMIC identifies corrective edits in a clinically relevant HBB splice-disrupting mutation without reverting it by using evolutionary and structural signals. For proteins, jointly conditioning on shape and surface chemistry of PD-L1 and hACE2 binding sites produces diverse, high-confidence sequences with strong in silico support for target binding. Finally, MIMIC uses experimental context as semantic conditioning to model assay-dependent RNA chemical probing, rather than treating context as a fixed output. Together, these results position MIMIC's aligned multimodal generative modeling as a strong foundation for unifying representation learning, conditional prediction, and constrained biomolecular design within a single model.
Protein Design with Agent Rosetta: A Case Study for Specialized Scientific Agents
Mar 16, 2026Large language models (LLMs) are capable of emulating reasoning and using tools, creating opportunities for autonomous agents that execute complex scientific tasks. Protein design provides a natural testbed: although machine learning (ML) methods achieve strong results, these are largely restricted to canonical amino acids and narrow objectives, leaving unfilled need for a generalist tool for broad design pipelines. We introduce Agent Rosetta, an LLM agent paired with a structured environment for operating Rosetta, the leading physics-based heteropolymer design software, capable of modeling non-canonical building blocks and geometries. Agent Rosetta iteratively refines designs to achieve user-defined objectives, combining LLM reasoning with Rosetta's generality. We evaluate Agent Rosetta on design with canonical amino acids, matching specialized models and expert baselines, and with non-canonical residues -- where ML approaches fail -- achieving comparable performance. Critically, prompt engineering alone often fails to generate Rosetta actions, demonstrating that environment design is essential for integrating LLM agents with specialized software. Our results show that properly designed environments enable LLM agents to make scientific software accessible while matching specialized tools and human experts.
Walrus: A Cross-Domain Foundation Model for Continuum Dynamics
Nov 19, 2025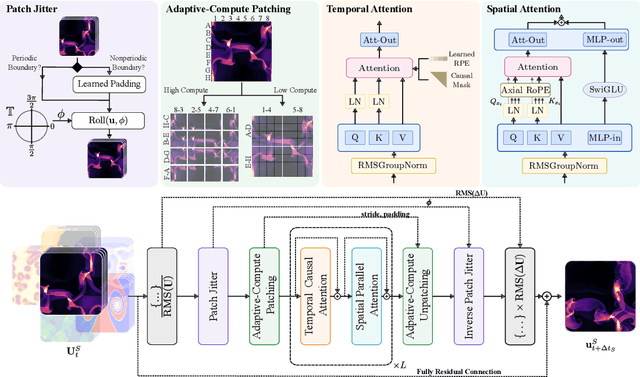


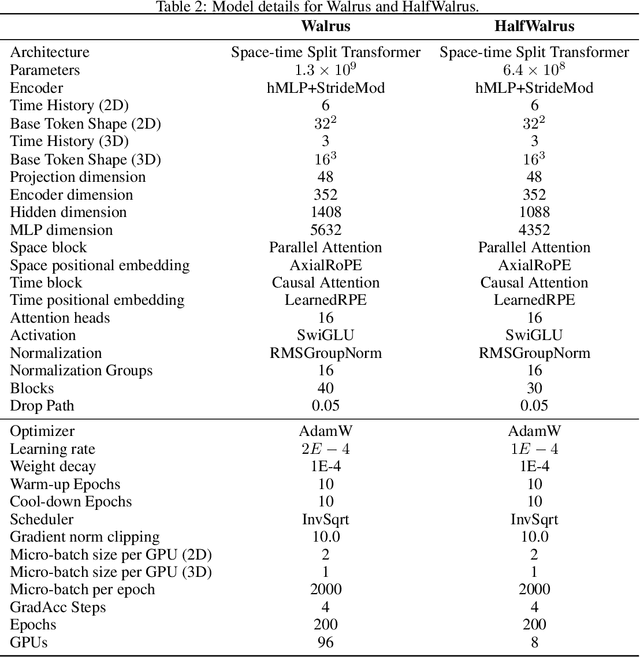
Foundation models have transformed machine learning for language and vision, but achieving comparable impact in physical simulation remains a challenge. Data heterogeneity and unstable long-term dynamics inhibit learning from sufficiently diverse dynamics, while varying resolutions and dimensionalities challenge efficient training on modern hardware. Through empirical and theoretical analysis, we incorporate new approaches to mitigate these obstacles, including a harmonic-analysis-based stabilization method, load-balanced distributed 2D and 3D training strategies, and compute-adaptive tokenization. Using these tools, we develop Walrus, a transformer-based foundation model developed primarily for fluid-like continuum dynamics. Walrus is pretrained on nineteen diverse scenarios spanning astrophysics, geoscience, rheology, plasma physics, acoustics, and classical fluids. Experiments show that Walrus outperforms prior foundation models on both short and long term prediction horizons on downstream tasks and across the breadth of pretraining data, while ablation studies confirm the value of our contributions to forecast stability, training throughput, and transfer performance over conventional approaches. Code and weights are released for community use.
What's In Your Field? Mapping Scientific Research with Knowledge Graphs and Large Language Models
Mar 12, 2025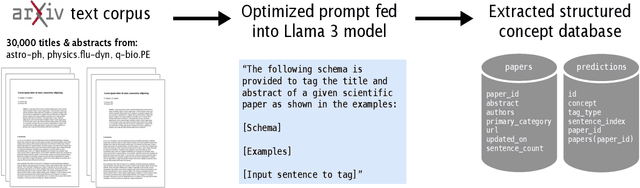
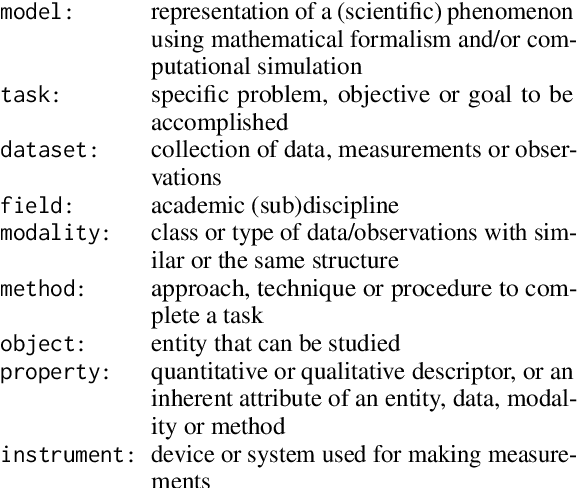
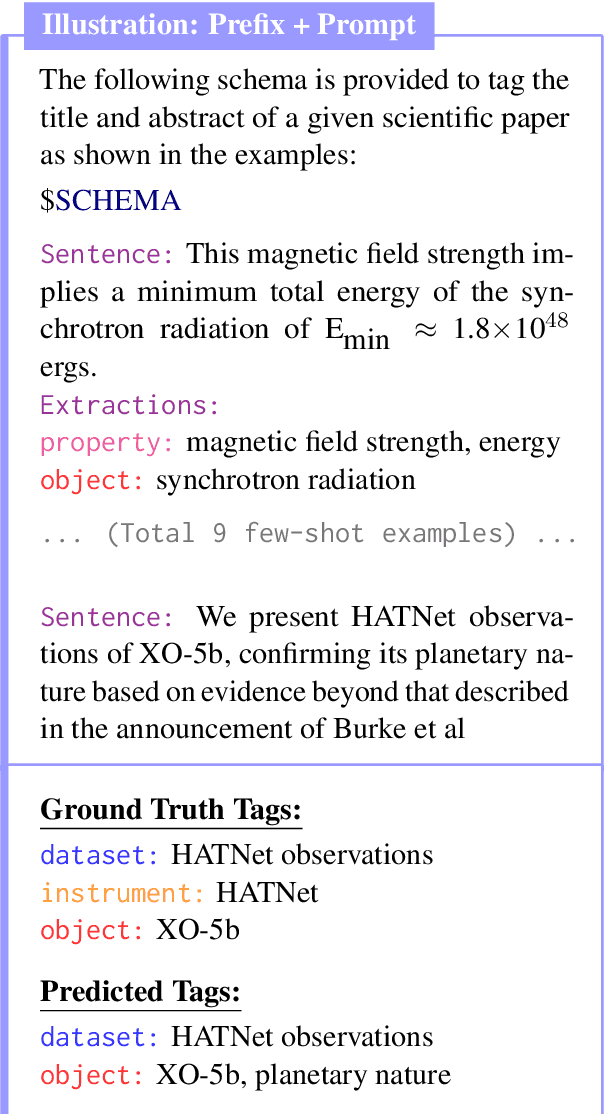
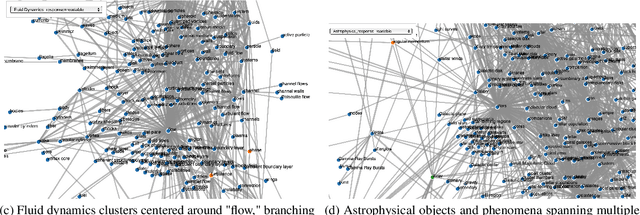
The scientific literature's exponential growth makes it increasingly challenging to navigate and synthesize knowledge across disciplines. Large language models (LLMs) are powerful tools for understanding scientific text, but they fail to capture detailed relationships across large bodies of work. Unstructured approaches, like retrieval augmented generation, can sift through such corpora to recall relevant facts; however, when millions of facts influence the answer, unstructured approaches become cost prohibitive. Structured representations offer a natural complement -- enabling systematic analysis across the whole corpus. Recent work enhances LLMs with unstructured or semistructured representations of scientific concepts; to complement this, we try extracting structured representations using LLMs. By combining LLMs' semantic understanding with a schema of scientific concepts, we prototype a system that answers precise questions about the literature as a whole. Our schema applies across scientific fields and we extract concepts from it using only 20 manually annotated abstracts. To demonstrate the system, we extract concepts from 30,000 papers on arXiv spanning astrophysics, fluid dynamics, and evolutionary biology. The resulting database highlights emerging trends and, by visualizing the knowledge graph, offers new ways to explore the ever-growing landscape of scientific knowledge. Demo: abby101/surveyor-0 on HF Spaces. Code: https://github.com/chiral-carbon/kg-for-science.
Contextual Counting: A Mechanistic Study of Transformers on a Quantitative Task
May 30, 2024Transformers have revolutionized machine learning across diverse domains, yet understanding their behavior remains crucial, particularly in high-stakes applications. This paper introduces the contextual counting task, a novel toy problem aimed at enhancing our understanding of Transformers in quantitative and scientific contexts. This task requires precise localization and computation within datasets, akin to object detection or region-based scientific analysis. We present theoretical and empirical analysis using both causal and non-causal Transformer architectures, investigating the influence of various positional encodings on performance and interpretability. In particular, we find that causal attention is much better suited for the task, and that no positional embeddings lead to the best accuracy, though rotary embeddings are competitive and easier to train. We also show that out of distribution performance is tightly linked to which tokens it uses as a bias term.
Neuronal Temporal Filters as Normal Mode Extractors
Jan 06, 2024To generate actions in the face of physiological delays, the brain must predict the future. Here we explore how prediction may lie at the core of brain function by considering a neuron predicting the future of a scalar time series input. Assuming that the dynamics of the lag vector (a vector composed of several consecutive elements of the time series) are locally linear, Normal Mode Decomposition decomposes the dynamics into independently evolving (eigen-)modes allowing for straightforward prediction. We propose that a neuron learns the top mode and projects its input onto the associated subspace. Under this interpretation, the temporal filter of a neuron corresponds to the left eigenvector of a generalized eigenvalue problem. We mathematically analyze the operation of such an algorithm on noisy observations of synthetic data generated by a linear system. Interestingly, the shape of the temporal filter varies with the signal-to-noise ratio (SNR): a noisy input yields a monophasic filter and a growing SNR leads to multiphasic filters with progressively greater number of phases. Such variation in the temporal filter with input SNR resembles that observed experimentally in biological neurons.
Multiple Physics Pretraining for Physical Surrogate Models
Oct 04, 2023


We introduce multiple physics pretraining (MPP), an autoregressive task-agnostic pretraining approach for physical surrogate modeling. MPP involves training large surrogate models to predict the dynamics of multiple heterogeneous physical systems simultaneously by learning features that are broadly useful across diverse physical tasks. In order to learn effectively in this setting, we introduce a shared embedding and normalization strategy that projects the fields of multiple systems into a single shared embedding space. We validate the efficacy of our approach on both pretraining and downstream tasks over a broad fluid mechanics-oriented benchmark. We show that a single MPP-pretrained transformer is able to match or outperform task-specific baselines on all pretraining sub-tasks without the need for finetuning. For downstream tasks, we demonstrate that finetuning MPP-trained models results in more accurate predictions across multiple time-steps on new physics compared to training from scratch or finetuning pretrained video foundation models. We open-source our code and model weights trained at multiple scales for reproducibility and community experimentation.
AstroCLIP: Cross-Modal Pre-Training for Astronomical Foundation Models
Oct 04, 2023We present AstroCLIP, a strategy to facilitate the construction of astronomical foundation models that bridge the gap between diverse observational modalities. We demonstrate that a cross-modal contrastive learning approach between images and optical spectra of galaxies yields highly informative embeddings of both modalities. In particular, we apply our method on multi-band images and optical spectra from the Dark Energy Spectroscopic Instrument (DESI), and show that: (1) these embeddings are well-aligned between modalities and can be used for accurate cross-modal searches, and (2) these embeddings encode valuable physical information about the galaxies -- in particular redshift and stellar mass -- that can be used to achieve competitive zero- and few- shot predictions without further finetuning. Additionally, in the process of developing our approach, we also construct a novel, transformer-based model and pretraining approach for processing galaxy spectra.
xVal: A Continuous Number Encoding for Large Language Models
Oct 04, 2023Large Language Models have not yet been broadly adapted for the analysis of scientific datasets due in part to the unique difficulties of tokenizing numbers. We propose xVal, a numerical encoding scheme that represents any real number using just a single token. xVal represents a given real number by scaling a dedicated embedding vector by the number value. Combined with a modified number-inference approach, this strategy renders the model end-to-end continuous when considered as a map from the numbers of the input string to those of the output string. This leads to an inductive bias that is generally more suitable for applications in scientific domains. We empirically evaluate our proposal on a number of synthetic and real-world datasets. Compared with existing number encoding schemes, we find that xVal is more token-efficient and demonstrates improved generalization.