 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Scene Change Modeling With Consistent Multi-View Aggregation
Dec 28, 2025Change detection plays a vital role in scene monitoring, exploration, and continual reconstruction. Existing 3D change detection methods often exhibit spatial inconsistency in the detected changes and fail to explicitly separate pre- and post-change states. To address these limitations, we propose SCaR-3D, a novel 3D scene change detection framework that identifies object-level changes from a dense-view pre-change image sequence and sparse-view post-change images. Our approach consists of a signed-distance-based 2D differencing module followed by multi-view aggregation with voting and pruning, leveraging the consistent nature of 3DGS to robustly separate pre- and post-change states. We further develop a continual scene reconstruction strategy that selectively updates dynamic regions while preserving the unchanged areas. We also contribute CCS3D, a challenging synthetic dataset that allows flexible combinations of 3D change types to support controlled evaluations. Extensive experiments demonstrate that our method achieves both high accuracy and efficiency, outperforming existing methods.
Reaching Consensus in Cooperative Multi-Agent Reinforcement Learning with Goal Imagination
Mar 05, 2024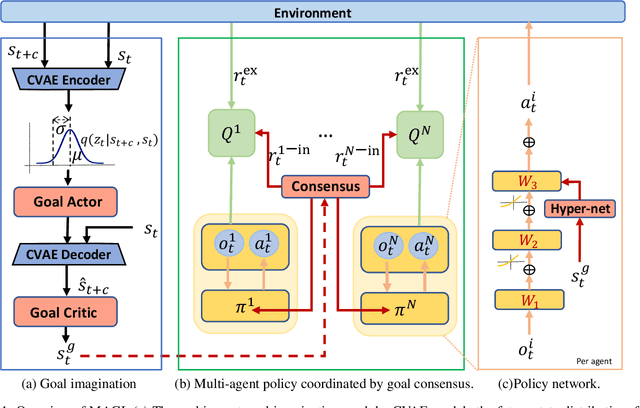
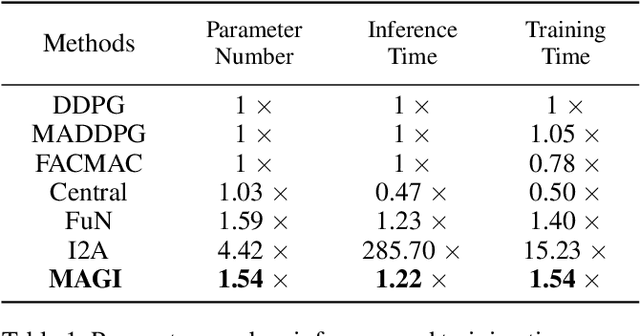
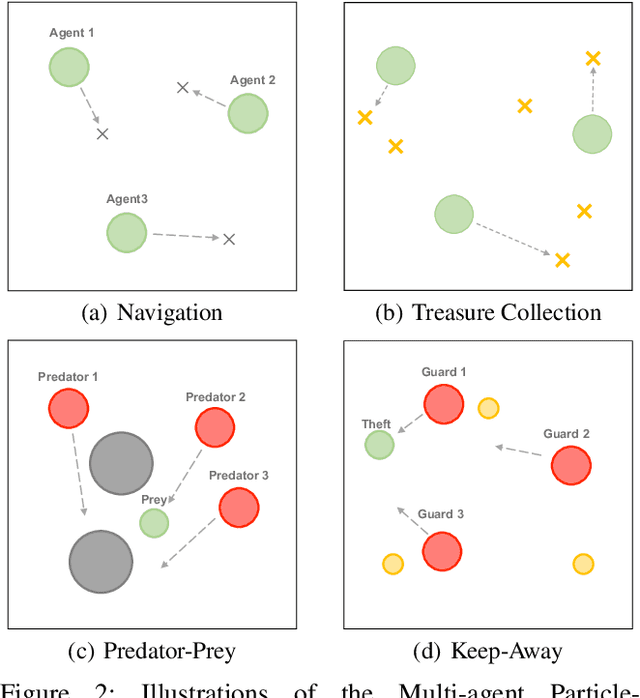
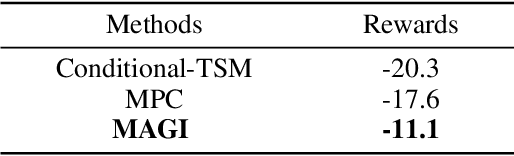
Reaching consensus is key to multi-agent coordination. To accomplish a cooperative task, agents need to coherently select optimal joint actions to maximize the team reward. However, current cooperative multi-agent reinforcement learning (MARL) methods usually do not explicitly take consensus into consideration, which may cause miscoordination problem. In this paper, we propose a model-based consensus mechanism to explicitly coordinate multiple agents. The proposed Multi-agent Goal Imagination (MAGI) framework guides agents to reach consensus with an Imagined common goal. The common goal is an achievable state with high value, which is obtained by sampling from the distribution of future states. We directly model this distribution with a self-supervised generative model, thus alleviating the "curse of dimensinality" problem induced by multi-agent multi-step policy rollout commonly used in model-based methods. We show that such efficient consensus mechanism can guide all agents cooperatively reaching valuable future states. Results on Multi-agent Particle-Environments and Google Research Football environment demonstrate the superiority of MAGI in both sample efficiency and performance.
OCHID-Fi: Occlusion-Robust Hand Pose Estimation in 3D via RF-Vision
Aug 20, 2023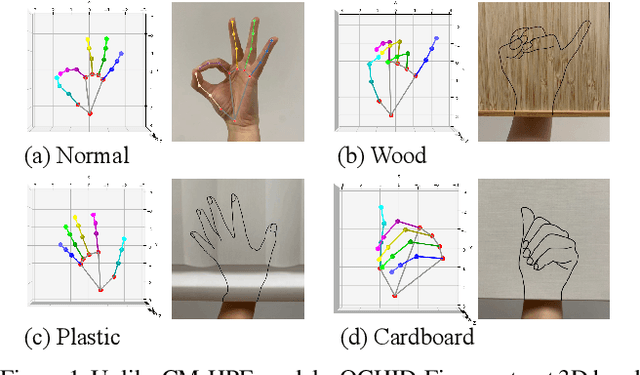
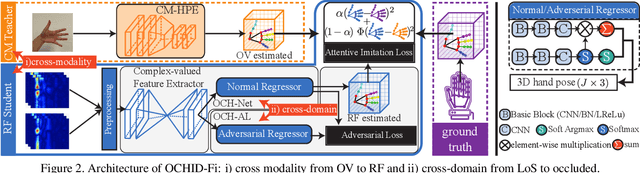
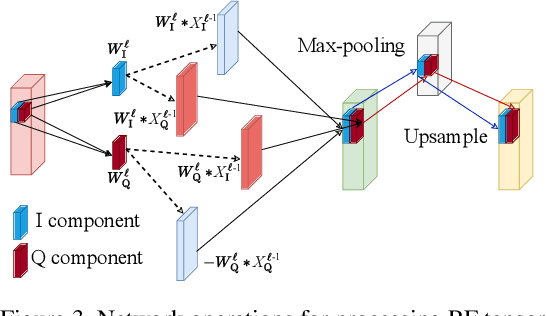
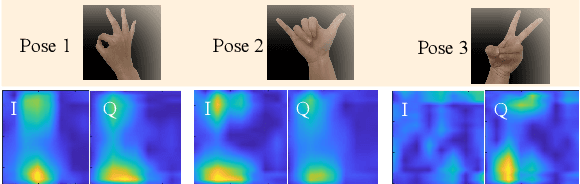
Hand Pose Estimation (HPE) is crucial to many applications, but conventional cameras-based CM-HPE methods are completely subject to Line-of-Sight (LoS), as cameras cannot capture occluded objects. In this paper, we propose to exploit Radio-Frequency-Vision (RF-vision) capable of bypassing obstacles for achieving occluded HPE, and we introduce OCHID-Fi as the first RF-HPE method with 3D pose estimation capability. OCHID-Fi employs wideband RF sensors widely available on smart devices (e.g., iPhones) to probe 3D human hand pose and extract their skeletons behind obstacles. To overcome the challenge in labeling RF imaging given its human incomprehensible nature, OCHID-Fi employs a cross-modality and cross-domain training process. It uses a pre-trained CM-HPE network and a synchronized CM/RF dataset, to guide the training of its complex-valued RF-HPE network under LoS conditions. It further transfers knowledge learned from labeled LoS domain to unlabeled occluded domain via adversarial learning, enabling OCHID-Fi to generalize to unseen occluded scenarios. Experimental results demonstrate the superiority of OCHID-Fi: it achieves comparable accuracy to CM-HPE under normal conditions while maintaining such accuracy even in occluded scenarios, with empirical evidence for its generalizability to new domains.
MoRe-Fi: Motion-robust and Fine-grained Respiration Monitoring via Deep-Learning UWB Radar
Nov 16, 2021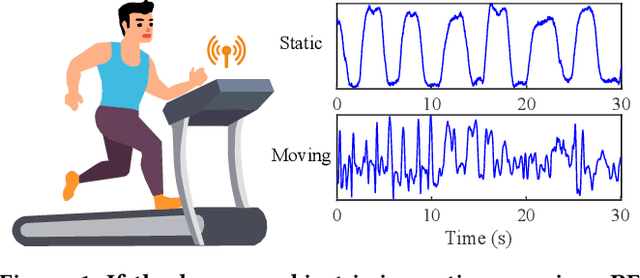
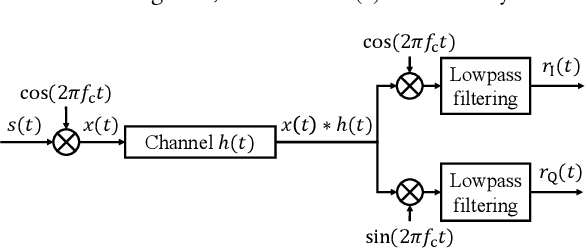
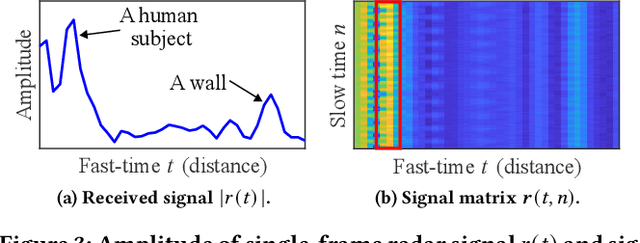
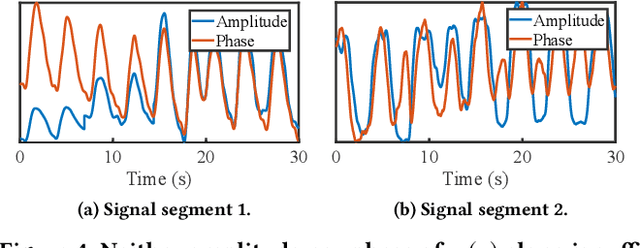
Crucial for healthcare and biomedical applications, respiration monitoring often employs wearable sensors in practice, causing inconvenience due to their direct contact with human bodies. Therefore, researchers have been constantly searching for contact-free alternatives. Nonetheless, existing contact-free designs mostly require human subjects to remain static, largely confining their adoptions in everyday environments where body movements are inevitable. Fortunately, radio-frequency (RF) enabled contact-free sensing, though suffering motion interference inseparable by conventional filtering, may offer a potential to distill respiratory waveform with the help of deep learning. To realize this potential, we introduce MoRe-Fi to conduct fine-grained respiration monitoring under body movements. MoRe-Fi leverages an IR-UWB radar to achieve contact-free sensing, and it fully exploits the complex radar signal for data augmentation. The core of MoRe-Fi is a novel variational encoder-decoder network; it aims to single out the respiratory waveforms that are modulated by body movements in a non-linear manner. Our experiments with 12 subjects and 66-hour data demonstrate that MoRe-Fi accurately recovers respiratory waveform despite the interference caused by body movements. We also discuss potential applications of MoRe-Fi for pulmonary disease diagnoses.
* 14 pages
BigDataBench: A Dwarf-based Big Data and AI Benchmark Suite
Feb 23, 2018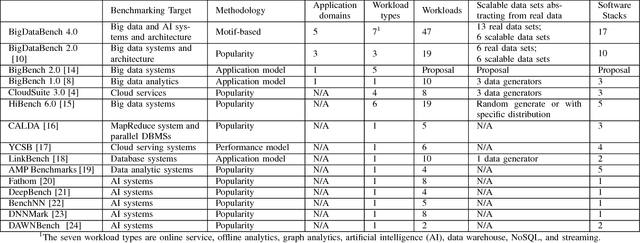
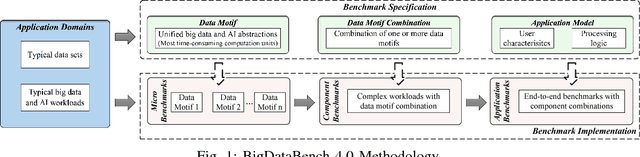
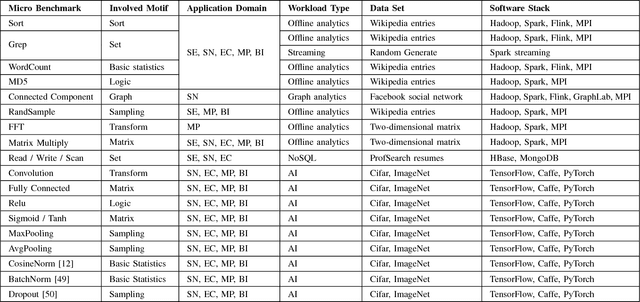
As architecture, system, data management, and machine learning communities pay greater attention to innovative big data and data-driven artificial intelligence (in short, AI) algorithms, architecture, and systems, the pressure of benchmarking rises. However, complexity, diversity, frequently changed workloads, and rapid evolution of big data, especially AI systems raise great challenges in benchmarking. First, for the sake of conciseness, benchmarking scalability, portability cost, reproducibility, and better interpretation of performance data, we need understand what are the abstractions of frequently-appearing units of computation, which we call dwarfs, among big data and AI workloads. Second, for the sake of fairness, the benchmarks must include diversity of data and workloads. Third, for co-design of software and hardware, the benchmarks should be consistent across different communities. Other than creating a new benchmark or proxy for every possible workload, we propose using dwarf-based benchmarks--the combination of eight dwarfs--to represent diversity of big data and AI workloads. The current version--BigDataBench 4.0 provides 13 representative real-world data sets and 47 big data and AI benchmarks, including seven workload types: online service, offline analytics, graph analytics, AI, data warehouse, NoSQL, and streaming. BigDataBench 4.0 is publicly available from http://prof.ict.ac.cn/BigDataBench. Also, for the first time, we comprehensively characterize the benchmarks of seven workload types in BigDataBench 4.0 in addition to traditional benchmarks like SPECCPU, PARSEC and HPCC in a hierarchical manner and drill down on five levels, using the Top-Down analysis from an architecture perspective.