 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVLingNav: Embodied Navigation with Adaptive Reasoning and Visual-Assisted Linguistic Memory
Jan 13, 2026VLA models have shown promising potential in embodied navigation by unifying perception and planning while inheriting the strong generalization abilities of large VLMs. However, most existing VLA models rely on reactive mappings directly from observations to actions, lacking the explicit reasoning capabilities and persistent memory required for complex, long-horizon navigation tasks. To address these challenges, we propose VLingNav, a VLA model for embodied navigation grounded in linguistic-driven cognition. First, inspired by the dual-process theory of human cognition, we introduce an adaptive chain-of-thought mechanism, which dynamically triggers explicit reasoning only when necessary, enabling the agent to fluidly switch between fast, intuitive execution and slow, deliberate planning. Second, to handle long-horizon spatial dependencies, we develop a visual-assisted linguistic memory module that constructs a persistent, cross-modal semantic memory, enabling the agent to recall past observations to prevent repetitive exploration and infer movement trends for dynamic environments. For the training recipe, we construct Nav-AdaCoT-2.9M, the largest embodied navigation dataset with reasoning annotations to date, enriched with adaptive CoT annotations that induce a reasoning paradigm capable of adjusting both when to think and what to think about. Moreover, we incorporate an online expert-guided reinforcement learning stage, enabling the model to surpass pure imitation learning and to acquire more robust, self-explored navigation behaviors. Extensive experiments demonstrate that VLingNav achieves state-of-the-art performance across a wide range of embodied navigation benchmarks. Notably, VLingNav transfers to real-world robotic platforms in a zero-shot manner, executing various navigation tasks and demonstrating strong cross-domain and cross-task generalization.
TrackVLA++: Unleashing Reasoning and Memory Capabilities in VLA Models for Embodied Visual Tracking
Oct 08, 2025Embodied Visual Tracking (EVT) is a fundamental ability that underpins practical applications, such as companion robots, guidance robots and service assistants, where continuously following moving targets is essential. Recent advances have enabled language-guided tracking in complex and unstructured scenes. However, existing approaches lack explicit spatial reasoning and effective temporal memory, causing failures under severe occlusions or in the presence of similar-looking distractors. To address these challenges, we present TrackVLA++, a novel Vision-Language-Action (VLA) model that enhances embodied visual tracking with two key modules, a spatial reasoning mechanism and a Target Identification Memory (TIM). The reasoning module introduces a Chain-of-Thought paradigm, termed Polar-CoT, which infers the target's relative position and encodes it as a compact polar-coordinate token for action prediction. Guided by these spatial priors, the TIM employs a gated update strategy to preserve long-horizon target memory, ensuring spatiotemporal consistency and mitigating target loss during extended occlusions. Extensive experiments show that TrackVLA++ achieves state-of-the-art performance on public benchmarks across both egocentric and multi-camera settings. On the challenging EVT-Bench DT split, TrackVLA++ surpasses the previous leading approach by 5.1 and 12, respectively. Furthermore, TrackVLA++ exhibits strong zero-shot generalization, enabling robust real-world tracking in dynamic and occluded scenarios.
LET-US: Long Event-Text Understanding of Scenes
Aug 10, 2025Event cameras output event streams as sparse, asynchronous data with microsecond-level temporal resolution, enabling visual perception with low latency and a high dynamic range. While existing Multimodal Large Language Models (MLLMs) have achieved significant success in understanding and analyzing RGB video content, they either fail to interpret event streams effectively or remain constrained to very short sequences. In this paper, we introduce LET-US, a framework for long event-stream--text comprehension that employs an adaptive compression mechanism to reduce the volume of input events while preserving critical visual details. LET-US thus establishes a new frontier in cross-modal inferential understanding over extended event sequences. To bridge the substantial modality gap between event streams and textual representations, we adopt a two-stage optimization paradigm that progressively equips our model with the capacity to interpret event-based scenes. To handle the voluminous temporal information inherent in long event streams, we leverage text-guided cross-modal queries for feature reduction, augmented by hierarchical clustering and similarity computation to distill the most representative event features. Moreover, we curate and construct a large-scale event-text aligned dataset to train our model, achieving tighter alignment of event features within the LLM embedding space. We also develop a comprehensive benchmark covering a diverse set of tasks -- reasoning, captioning, classification, temporal localization and moment retrieval. Experimental results demonstrate that LET-US outperforms prior state-of-the-art MLLMs in both descriptive accuracy and semantic comprehension on long-duration event streams. All datasets, codes, and models will be publicly available.
TrackVLA: Embodied Visual Tracking in the Wild
May 29, 2025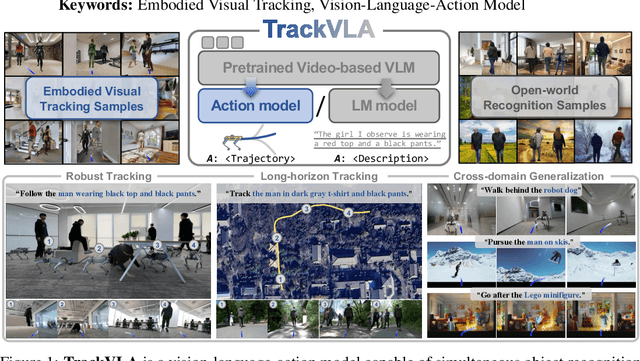
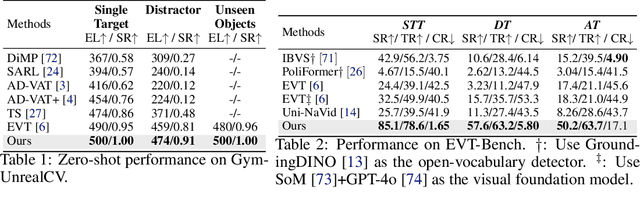
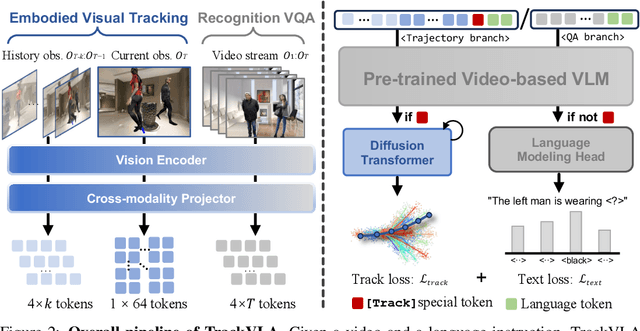
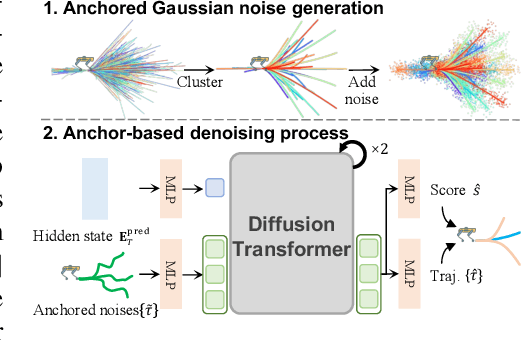
Embodied visual tracking is a fundamental skill in Embodied AI, enabling an agent to follow a specific target in dynamic environments using only egocentric vision. This task is inherently challenging as it requires both accurate target recognition and effective trajectory planning under conditions of severe occlusion and high scene dynamics. Existing approaches typically address this challenge through a modular separation of recognition and planning. In this work, we propose TrackVLA, a Vision-Language-Action (VLA) model that learns the synergy between object recognition and trajectory planning. Leveraging a shared LLM backbone, we employ a language modeling head for recognition and an anchor-based diffusion model for trajectory planning. To train TrackVLA, we construct an Embodied Visual Tracking Benchmark (EVT-Bench) and collect diverse difficulty levels of recognition samples, resulting in a dataset of 1.7 million samples. Through extensive experiments in both synthetic and real-world environments, TrackVLA demonstrates SOTA performance and strong generalizability. It significantly outperforms existing methods on public benchmarks in a zero-shot manner while remaining robust to high dynamics and occlusion in real-world scenarios at 10 FPS inference speed. Our project page is: https://pku-epic.github.io/TrackVLA-web.
Uni-NaVid: A Video-based Vision-Language-Action Model for Unifying Embodied Navigation Tasks
Dec 09, 2024A practical navigation agent must be capable of handling a wide range of interaction demands, such as following instructions, searching objects, answering questions, tracking people, and more. Existing models for embodied navigation fall short of serving as practical generalists in the real world, as they are often constrained by specific task configurations or pre-defined maps with discretized waypoints. In this work, we present Uni-NaVid, the first video-based vision-language-action (VLA) model designed to unify diverse embodied navigation tasks and enable seamless navigation for mixed long-horizon tasks in unseen real-world environments. Uni-NaVid achieves this by harmonizing the input and output data configurations for all commonly used embodied navigation tasks and thereby integrating all tasks in one model. For training Uni-NaVid, we collect 3.6 million navigation data samples in total from four essential navigation sub-tasks and foster synergy in learning across them. Extensive experiments on comprehensive navigation benchmarks clearly demonstrate the advantages of unification modeling in Uni-NaVid and show it achieves state-of-the-art performance. Additionally, real-world experiments confirm the model's effectiveness and efficiency, shedding light on its strong generalizability.
EF-Calib: Spatiotemporal Calibration of Event- and Frame-Based Cameras Using Continuous-Time Trajectories
May 27, 2024Event camera, a bio-inspired asynchronous triggered camera, offers promising prospects for fusion with frame-based cameras owing to its low latency and high dynamic range. However, calibrating stereo vision systems that incorporate both event and frame-based cameras remains a significant challenge. In this letter, we present EF-Calib, a spatiotemporal calibration framework for event- and frame-based cameras using continuous-time trajectories. A novel calibration pattern applicable to both camera types and the corresponding event recognition algorithm is proposed. Leveraging the asynchronous nature of events, a derivable piece-wise B-spline to represent camera pose continuously is introduced, enabling calibration for intrinsic parameters, extrinsic parameters, and time offset, with analytical Jacobians provided. Various experiments are carried out to evaluate the calibration performance of EF-Calib, including calibration experiments for intrinsic parameters, extrinsic parameters, and time offset. Experimental results show that EF-Calib achieves the most accurate intrinsic parameters compared to current SOTA, the close accuracy of the extrinsic parameters compared to the frame-based results, and accurate time offset estimation. EF-Calib provides a convenient and accurate toolbox for calibrating the system that fuses events and frames. The code of this paper will also be open-sourced at: https://github.com/wsakobe/EF-Calib.
CylinderTag: An Accurate and Flexible Marker for Cylinder-Shape Objects Pose Estimation Based on Projective Invariants
Oct 20, 2023



High-precision pose estimation based on visual markers has been a thriving research topic in the field of computer vision. However, the suitability of traditional flat markers on curved objects is limited due to the diverse shapes of curved surfaces, which hinders the development of high-precision pose estimation for curved objects. Therefore, this paper proposes a novel visual marker called CylinderTag, which is designed for developable curved surfaces such as cylindrical surfaces. CylinderTag is a cyclic marker that can be firmly attached to objects with a cylindrical shape. Leveraging the manifold assumption, the cross-ratio in projective invariance is utilized for encoding in the direction of zero curvature on the surface. Additionally, to facilitate the usage of CylinderTag, we propose a heuristic search-based marker generator and a high-performance recognizer as well. Moreover, an all-encompassing evaluation of CylinderTag properties is conducted by means of extensive experimentation, covering detection rate, detection speed, dictionary size, localization jitter, and pose estimation accuracy. CylinderTag showcases superior detection performance from varying view angles in comparison to traditional visual markers, accompanied by higher localization accuracy. Furthermore, CylinderTag boasts real-time detection capability and an extensive marker dictionary, offering enhanced versatility and practicality in a wide range of applications. Experimental results demonstrate that the CylinderTag is a highly promising visual marker for use on cylindrical-like surfaces, thus offering important guidance for future research on high-precision visual localization of cylinder-shaped objects. The code is available at: https://github.com/wsakobe/CylinderTag.