 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHandOS: 3D Hand Reconstruction in One Stage
Dec 02, 2024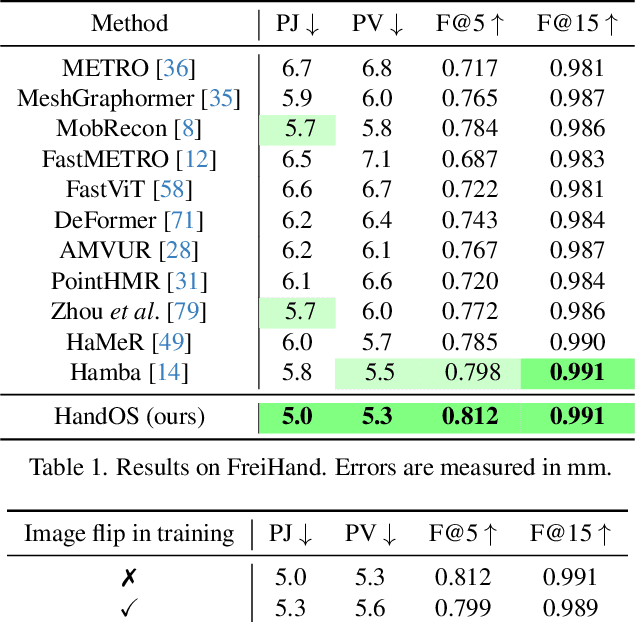
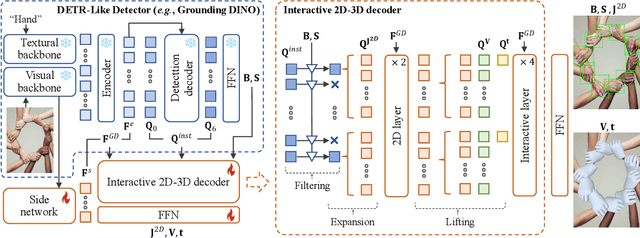
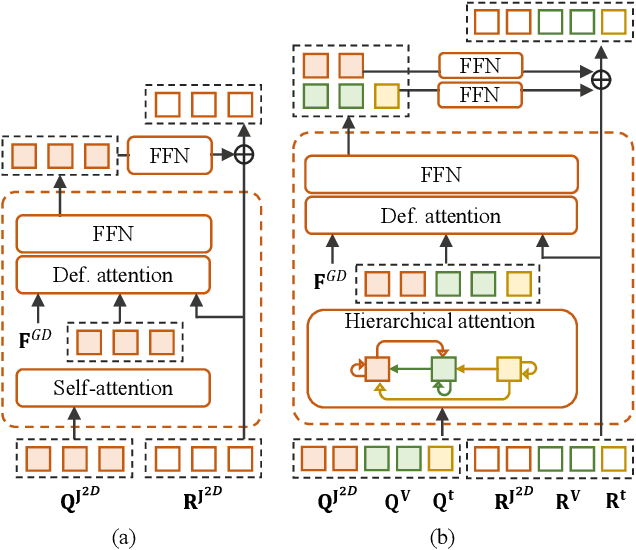
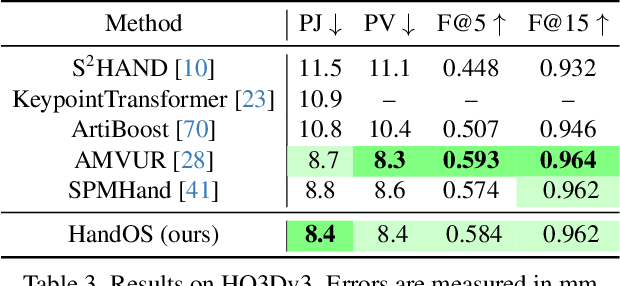
Existing approaches of hand reconstruction predominantly adhere to a multi-stage framework, encompassing detection, left-right classification, and pose estimation. This paradigm induces redundant computation and cumulative errors. In this work, we propose HandOS, an end-to-end framework for 3D hand reconstruction. Our central motivation lies in leveraging a frozen detector as the foundation while incorporating auxiliary modules for 2D and 3D keypoint estimation. In this manner, we integrate the pose estimation capacity into the detection framework, while at the same time obviating the necessity of using the left-right category as a prerequisite. Specifically, we propose an interactive 2D-3D decoder, where 2D joint semantics is derived from detection cues while 3D representation is lifted from those of 2D joints. Furthermore, hierarchical attention is designed to enable the concurrent modeling of 2D joints, 3D vertices, and camera translation. Consequently, we achieve an end-to-end integration of hand detection, 2D pose estimation, and 3D mesh reconstruction within a one-stage framework, so that the above multi-stage drawbacks are overcome. Meanwhile, the HandOS reaches state-of-the-art performances on public benchmarks, e.g., 5.0 PA-MPJPE on FreiHand and 64.6\% PCK@0.05 on HInt-Ego4D. Project page: idea-research.github.io/HandOSweb.
EF-Calib: Spatiotemporal Calibration of Event- and Frame-Based Cameras Using Continuous-Time Trajectories
May 27, 2024Event camera, a bio-inspired asynchronous triggered camera, offers promising prospects for fusion with frame-based cameras owing to its low latency and high dynamic range. However, calibrating stereo vision systems that incorporate both event and frame-based cameras remains a significant challenge. In this letter, we present EF-Calib, a spatiotemporal calibration framework for event- and frame-based cameras using continuous-time trajectories. A novel calibration pattern applicable to both camera types and the corresponding event recognition algorithm is proposed. Leveraging the asynchronous nature of events, a derivable piece-wise B-spline to represent camera pose continuously is introduced, enabling calibration for intrinsic parameters, extrinsic parameters, and time offset, with analytical Jacobians provided. Various experiments are carried out to evaluate the calibration performance of EF-Calib, including calibration experiments for intrinsic parameters, extrinsic parameters, and time offset. Experimental results show that EF-Calib achieves the most accurate intrinsic parameters compared to current SOTA, the close accuracy of the extrinsic parameters compared to the frame-based results, and accurate time offset estimation. EF-Calib provides a convenient and accurate toolbox for calibrating the system that fuses events and frames. The code of this paper will also be open-sourced at: https://github.com/wsakobe/EF-Calib.
CylinderTag: An Accurate and Flexible Marker for Cylinder-Shape Objects Pose Estimation Based on Projective Invariants
Oct 20, 2023



High-precision pose estimation based on visual markers has been a thriving research topic in the field of computer vision. However, the suitability of traditional flat markers on curved objects is limited due to the diverse shapes of curved surfaces, which hinders the development of high-precision pose estimation for curved objects. Therefore, this paper proposes a novel visual marker called CylinderTag, which is designed for developable curved surfaces such as cylindrical surfaces. CylinderTag is a cyclic marker that can be firmly attached to objects with a cylindrical shape. Leveraging the manifold assumption, the cross-ratio in projective invariance is utilized for encoding in the direction of zero curvature on the surface. Additionally, to facilitate the usage of CylinderTag, we propose a heuristic search-based marker generator and a high-performance recognizer as well. Moreover, an all-encompassing evaluation of CylinderTag properties is conducted by means of extensive experimentation, covering detection rate, detection speed, dictionary size, localization jitter, and pose estimation accuracy. CylinderTag showcases superior detection performance from varying view angles in comparison to traditional visual markers, accompanied by higher localization accuracy. Furthermore, CylinderTag boasts real-time detection capability and an extensive marker dictionary, offering enhanced versatility and practicality in a wide range of applications. Experimental results demonstrate that the CylinderTag is a highly promising visual marker for use on cylindrical-like surfaces, thus offering important guidance for future research on high-precision visual localization of cylinder-shaped objects. The code is available at: https://github.com/wsakobe/CylinderTag.