 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLET-US: Long Event-Text Understanding of Scenes
Aug 10, 2025Event cameras output event streams as sparse, asynchronous data with microsecond-level temporal resolution, enabling visual perception with low latency and a high dynamic range. While existing Multimodal Large Language Models (MLLMs) have achieved significant success in understanding and analyzing RGB video content, they either fail to interpret event streams effectively or remain constrained to very short sequences. In this paper, we introduce LET-US, a framework for long event-stream--text comprehension that employs an adaptive compression mechanism to reduce the volume of input events while preserving critical visual details. LET-US thus establishes a new frontier in cross-modal inferential understanding over extended event sequences. To bridge the substantial modality gap between event streams and textual representations, we adopt a two-stage optimization paradigm that progressively equips our model with the capacity to interpret event-based scenes. To handle the voluminous temporal information inherent in long event streams, we leverage text-guided cross-modal queries for feature reduction, augmented by hierarchical clustering and similarity computation to distill the most representative event features. Moreover, we curate and construct a large-scale event-text aligned dataset to train our model, achieving tighter alignment of event features within the LLM embedding space. We also develop a comprehensive benchmark covering a diverse set of tasks -- reasoning, captioning, classification, temporal localization and moment retrieval. Experimental results demonstrate that LET-US outperforms prior state-of-the-art MLLMs in both descriptive accuracy and semantic comprehension on long-duration event streams. All datasets, codes, and models will be publicly available.
A Novel ViDAR Device With Visual Inertial Encoder Odometry and Reinforcement Learning-Based Active SLAM Method
Jun 16, 2025In the field of multi-sensor fusion for simultaneous localization and mapping (SLAM), monocular cameras and IMUs are widely used to build simple and effective visual-inertial systems. However, limited research has explored the integration of motor-encoder devices to enhance SLAM performance. By incorporating such devices, it is possible to significantly improve active capability and field of view (FOV) with minimal additional cost and structural complexity. This paper proposes a novel visual-inertial-encoder tightly coupled odometry (VIEO) based on a ViDAR (Video Detection and Ranging) device. A ViDAR calibration method is introduced to ensure accurate initialization for VIEO. In addition, a platform motion decoupled active SLAM method based on deep reinforcement learning (DRL) is proposed. Experimental data demonstrate that the proposed ViDAR and the VIEO algorithm significantly increase cross-frame co-visibility relationships compared to its corresponding visual-inertial odometry (VIO) algorithm, improving state estimation accuracy. Additionally, the DRL-based active SLAM algorithm, with the ability to decouple from platform motion, can increase the diversity weight of the feature points and further enhance the VIEO algorithm's performance. The proposed methodology sheds fresh insights into both the updated platform design and decoupled approach of active SLAM systems in complex environments.
* 12 pages, 13 figures
A Novel Underwater Vehicle With Orientation Adjustable Thrusters: Design and Adaptive Tracking Control
Mar 25, 2025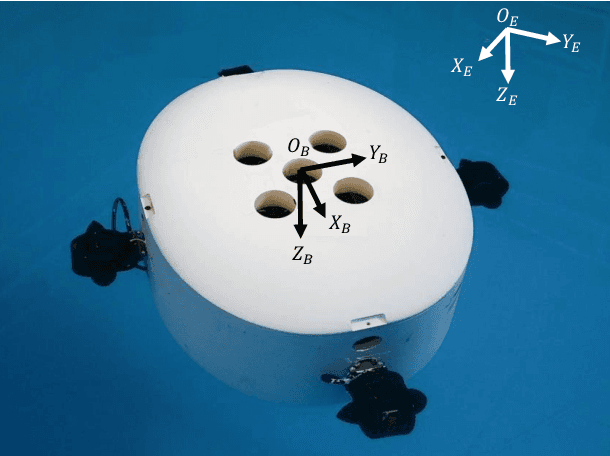


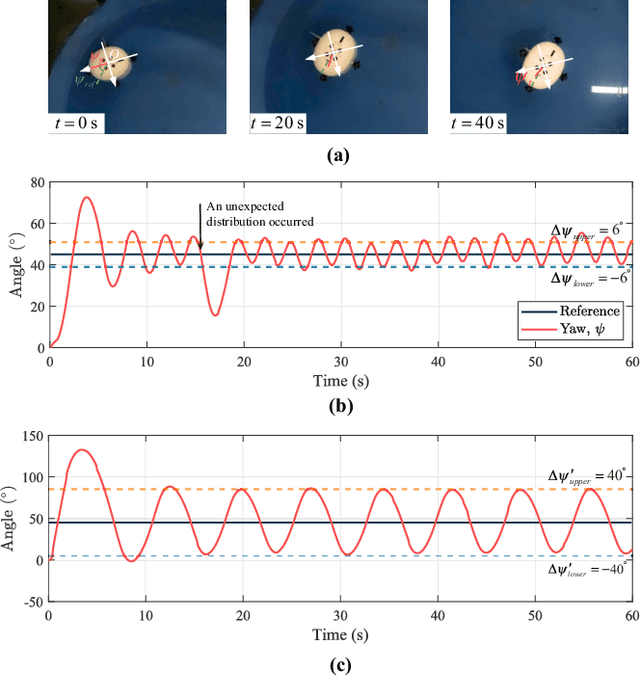
Autonomous underwater vehicles (AUVs) are essential for marine exploration and research. However, conventional designs often struggle with limited maneuverability in complex, dynamic underwater environments. This paper introduces an innovative orientation-adjustable thruster AUV (OATAUV), equipped with a redundant vector thruster configuration that enables full six-degree-of-freedom (6-DOF) motion and composite maneuvers. To overcome challenges associated with uncertain model parameters and environmental disturbances, a novel feedforward adaptive model predictive controller (FFAMPC) is proposed to ensure robust trajectory tracking, which integrates real-time state feedback with adaptive parameter updates. Extensive experiments, including closed-loop tracking and composite motion tests in a laboratory pool, validate the enhanced performance of the OAT-AUV. The results demonstrate that the OAT-AUV's redundant vector thruster configuration enables 23.8% cost reduction relative to common vehicles, while the FF-AMPC controller achieves 68.6% trajectory tracking improvement compared to PID controllers. Uniquely, the system executes composite helical/spiral trajectories unattainable by similar vehicles.
Towards Real-Time Accurate Object Detection in Both Images and Videos Based on Dual Refinement
Dec 17, 2018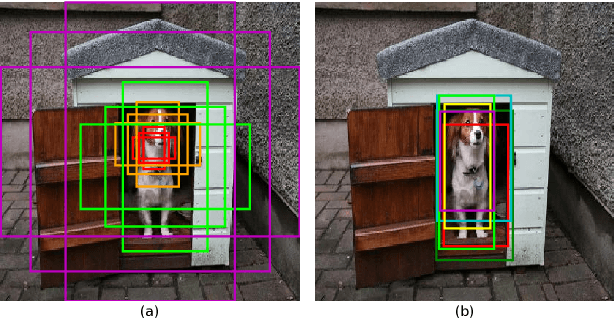
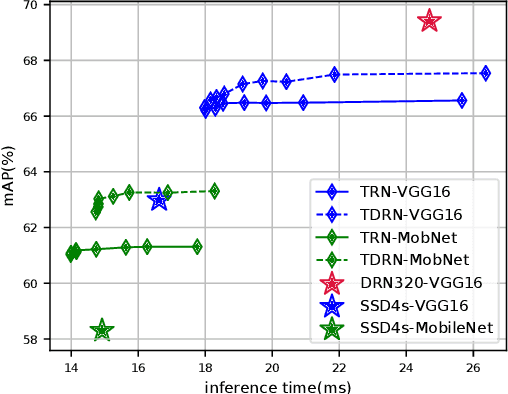
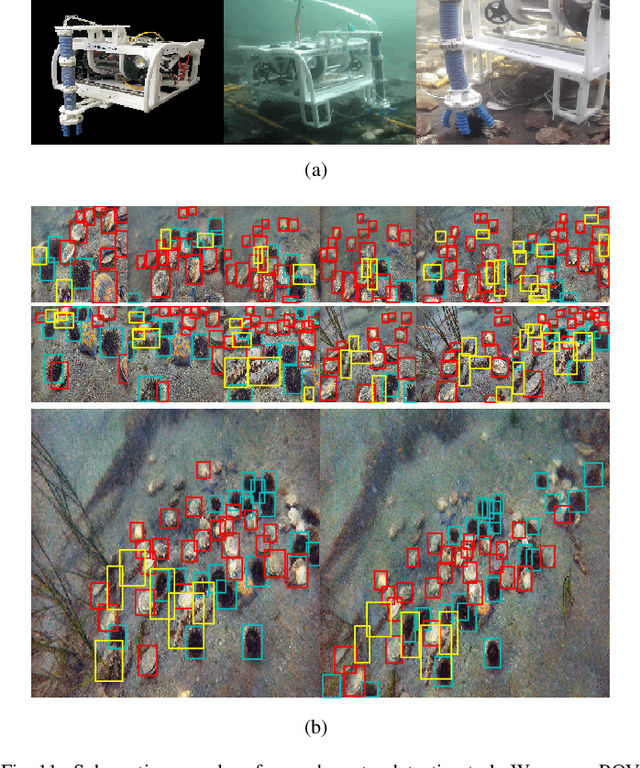
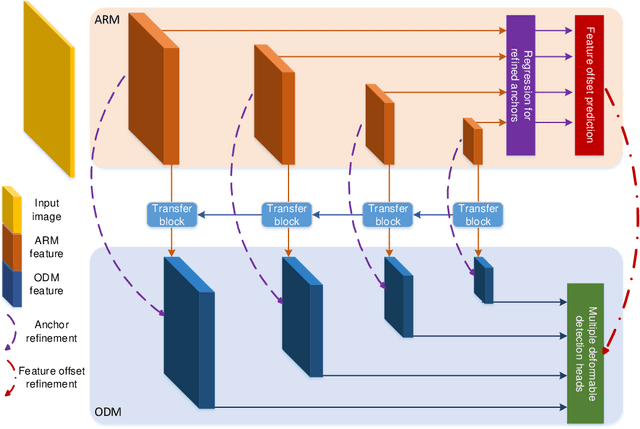
Object detection has been vigorously studied for years but fast accurate detection for real-world applications remains a very challenging problem: i) Most existing methods have either high accuracy or fast speed; ii) Most prior-art approaches focus on static images, ignoring temporal information in real-world scenes. Overcoming drawbacks of single-stage detectors, we take aim at precisely detecting objects in both images and videos in real time. Firstly, as a dual refinement mechanism, a novel anchor-offset detection including an anchor refinement, a feature offset refinement, and a deformable detection head is designed for two-step regression and capturing accurate detection features. Based on the anchor-offset detection, a dual refinement network (DRN) is developed for high-performance static detection, where a multi-deformable head is further designed to leverage contextual information for describing objects. As for video detection, temporal refinement networks (TRN) and temporal dual refinement networks (TDRN) are developed by propagating the refinement information across time. Our proposed methods are evaluated on PASCAL VOC, COCO, and ImageNet VID datasets. Extensive comparison on static and temporal detection validate the superiority of the DRN, TRN and TDRN. Consequently, our developed approaches achieve a significantly enhanced detection accuracy and make prominent progress in accuracy vs. speed trade-off. Codes will be publicly available.
Towards Quality Advancement of Underwater Machine Vision with Generative Adversarial Networks
Jan 16, 2018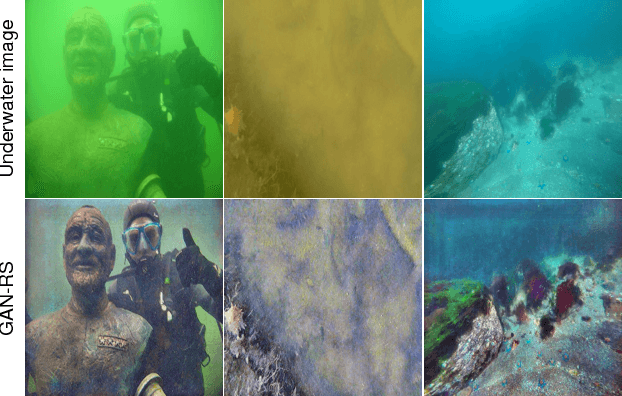
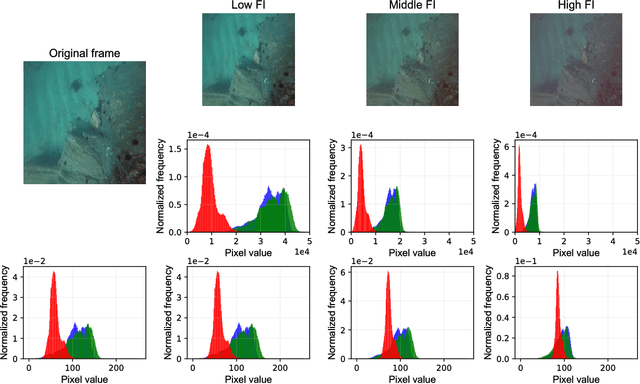
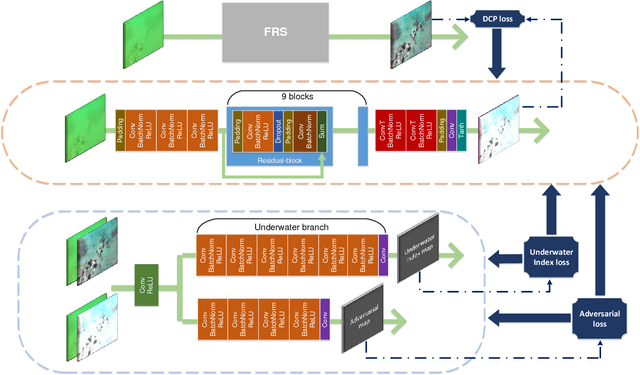
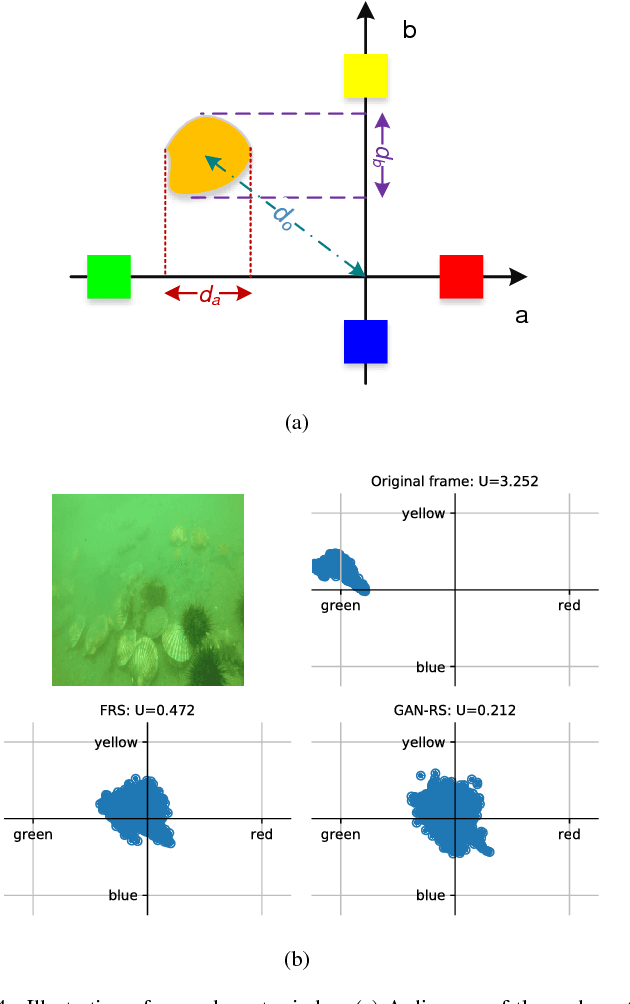
Underwater machine vision has attracted significant attention, but its low quality has prevented it from a wide range of applications. Although many different algorithms have been developed to solve this problem, real-time adaptive methods are frequently deficient. In this paper, based on filtering and the use of generative adversarial networks (GANs), two approaches are proposed for the aforementioned issue, i.e., a filtering-based restoration scheme (FRS) and a GAN-based restoration scheme (GAN-RS). Distinct from previous methods, FRS restores underwater images in the Fourier domain, which is composed of a parameter search, filtering, and enhancement. Aiming to further improve the image quality, GAN-RS can adaptively restore underwater machine vision in real time without the need for pretreatment. In particular, information in the Lab color space and the dark channel is developed as loss functions, namely, underwater index loss and dark channel prior loss, respectively. More specifically, learning from the underwater index, the discriminator is equipped with a carefully crafted underwater branch to predict the underwater probability of an image. A multi-stage loss strategy is then developed to guarantee the effective training of GANs. Through extensive comparisons on the image quality and applications, the superiority of the proposed approaches is confirmed. Consequently, the GAN-RS is considerably faster and achieves a state-of-the-art performance in terms of the color correction, contrast stretch, dehazing, and feature restoration of various underwater scenes. The source code will be made available.