 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Novel ViDAR Device With Visual Inertial Encoder Odometry and Reinforcement Learning-Based Active SLAM Method
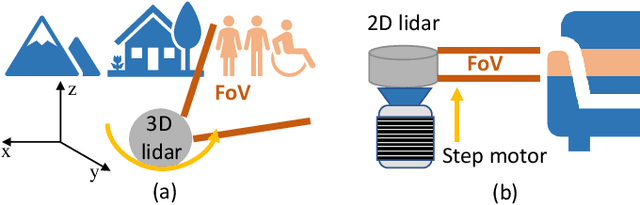
Jun 16, 2025In the field of multi-sensor fusion for simultaneous localization and mapping (SLAM), monocular cameras and IMUs are widely used to build simple and effective visual-inertial systems. However, limited research has explored the integration of motor-encoder devices to enhance SLAM performance. By incorporating such devices, it is possible to significantly improve active capability and field of view (FOV) with minimal additional cost and structural complexity. This paper proposes a novel visual-inertial-encoder tightly coupled odometry (VIEO) based on a ViDAR (Video Detection and Ranging) device. A ViDAR calibration method is introduced to ensure accurate initialization for VIEO. In addition, a platform motion decoupled active SLAM method based on deep reinforcement learning (DRL) is proposed. Experimental data demonstrate that the proposed ViDAR and the VIEO algorithm significantly increase cross-frame co-visibility relationships compared to its corresponding visual-inertial odometry (VIO) algorithm, improving state estimation accuracy. Additionally, the DRL-based active SLAM algorithm, with the ability to decouple from platform motion, can increase the diversity weight of the feature points and further enhance the VIEO algorithm's performance. The proposed methodology sheds fresh insights into both the updated platform design and decoupled approach of active SLAM systems in complex environments.
* 12 pages, 13 figures
JANUS: A Difference-Oriented Analyzer For Financial Centralization Risks in Smart Contracts
Dec 05, 2024Some smart contracts violate decentralization principles by defining privileged accounts that manage other users' assets without permission, introducing centralization risks that have caused financial losses. Existing methods, however, face challenges in accurately detecting diverse centralization risks due to their dependence on predefined behavior patterns. In this paper, we propose JANUS, an automated analyzer for Solidity smart contracts that detects financial centralization risks independently of their specific behaviors. JANUS identifies differences between states reached by privileged and ordinary accounts, and analyzes whether these differences are finance-related. Focusing on the impact of risks rather than behaviors, JANUS achieves improved accuracy compared to existing tools and can uncover centralization risks with unknown patterns. To evaluate JANUS's performance, we compare it with other tools using a dataset of 540 contracts. Our evaluation demonstrates that JANUS outperforms representative tools in terms of detection accuracy for financial centralization risks . Additionally, we evaluate JANUS on a real-world dataset of 33,151 contracts, successfully identifying two types of risks that other tools fail to detect. We also prove that the state traversal method and variable summaries, which are used in JANUS to reduce the number of states to be compared, do not introduce false alarms or omissions in detection.
An Adjustable Farthest Point Sampling Method for Approximately-sorted Point Cloud Data
Aug 18, 2022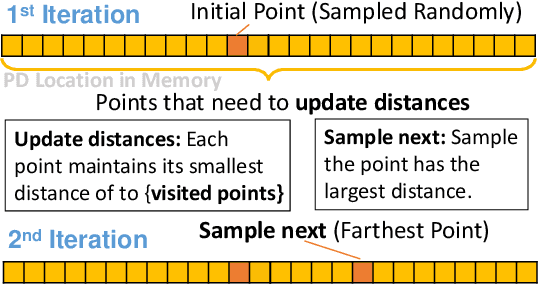
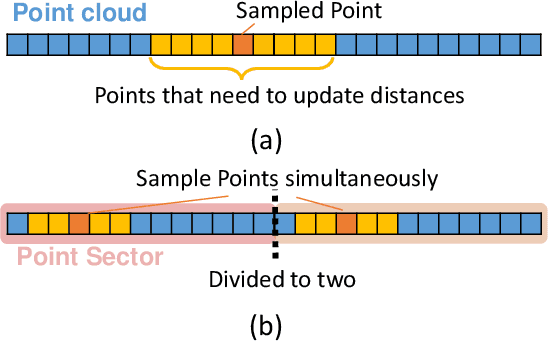
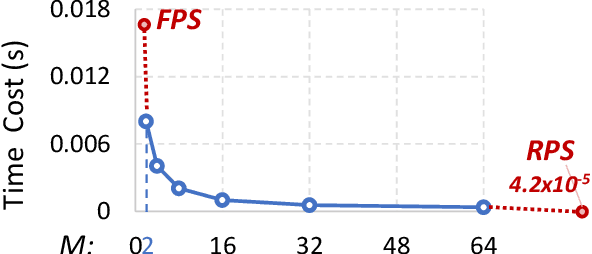
Sampling is an essential part of raw point cloud data processing such as in the popular PointNet++ scheme. Farthest Point Sampling (FPS), which iteratively samples the farthest point and performs distance updating, is one of the most popular sampling schemes. Unfortunately it suffers from low efficiency and can become the bottleneck of point cloud applications. We propose adjustable FPS (AFPS), parameterized by M, to aggressively reduce the complexity of FPS without compromising on the sampling performance. Specifically, it divides the original point cloud into M small point clouds and samples M points simultaneously. It exploits the dimensional locality of an approximately sorted point cloud data to minimize its performance degradation. AFPS method can achieve 22 to 30x speedup over original FPS. Furthermore, we propose the nearest-point-distance-updating (NPDU) method to limit the number of distance updates to a constant number. The combined NPDU on AFPS method can achieve a 34-280x speedup on a point cloud with 2K-32K points with algorithmic performance that is comparable to the original FPS. For instance, for the ShapeNet part segmentation task, it achieves 0.8490 instance average mIoU (mean Intersection of Union), which is only 0.0035 drop compared to the original FPS.