 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Quality Advancement of Underwater Machine Vision with Generative Adversarial Networks
Paper and Code
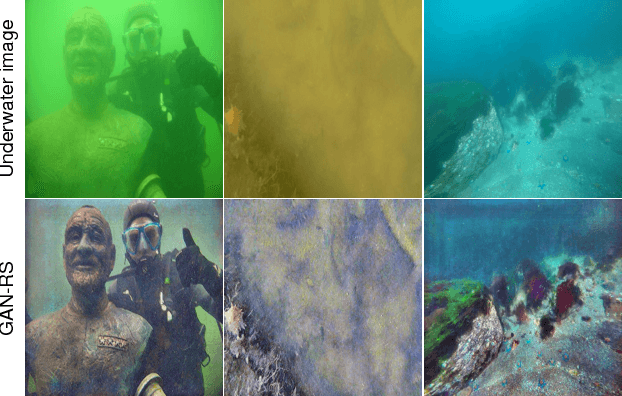
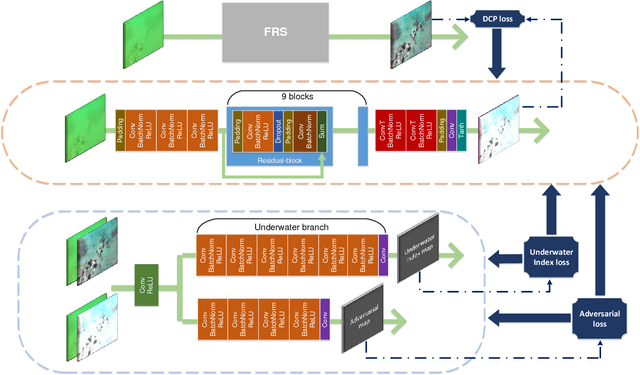
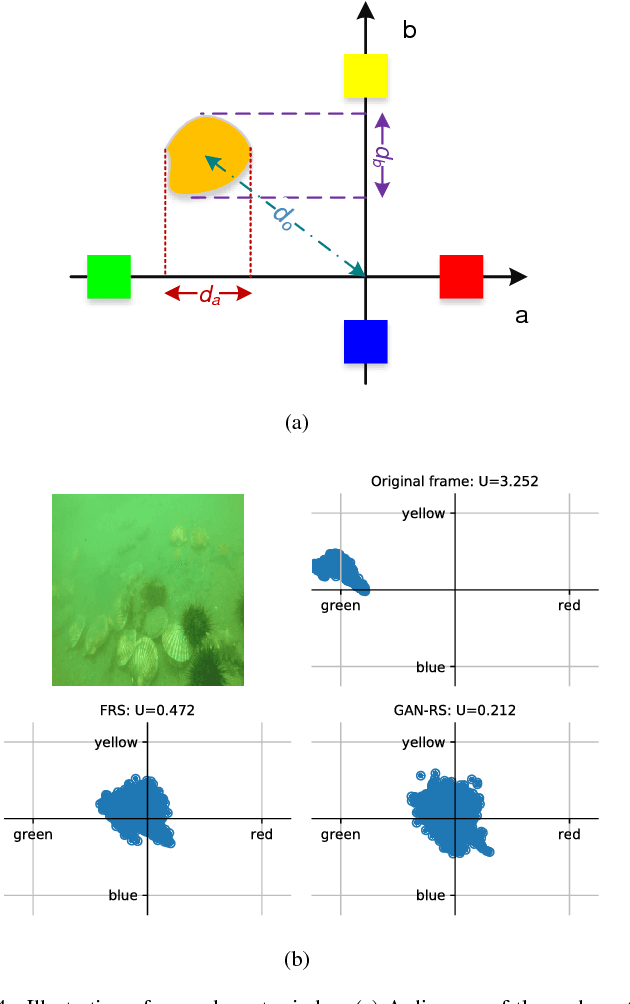
Underwater machine vision has attracted significant attention, but its low quality has prevented it from a wide range of applications. Although many different algorithms have been developed to solve this problem, real-time adaptive methods are frequently deficient. In this paper, based on filtering and the use of generative adversarial networks (GANs), two approaches are proposed for the aforementioned issue, i.e., a filtering-based restoration scheme (FRS) and a GAN-based restoration scheme (GAN-RS). Distinct from previous methods, FRS restores underwater images in the Fourier domain, which is composed of a parameter search, filtering, and enhancement. Aiming to further improve the image quality, GAN-RS can adaptively restore underwater machine vision in real time without the need for pretreatment. In particular, information in the Lab color space and the dark channel is developed as loss functions, namely, underwater index loss and dark channel prior loss, respectively. More specifically, learning from the underwater index, the discriminator is equipped with a carefully crafted underwater branch to predict the underwater probability of an image. A multi-stage loss strategy is then developed to guarantee the effective training of GANs. Through extensive comparisons on the image quality and applications, the superiority of the proposed approaches is confirmed. Consequently, the GAN-RS is considerably faster and achieves a state-of-the-art performance in terms of the color correction, contrast stretch, dehazing, and feature restoration of various underwater scenes. The source code will be made available.