 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLong Live the Librarian! A Persistent Search Sub-Agent for Energy-Efficient Multi-Agent Software Engineering Systems
May 27, 2026Multi-agent systems (MAS) have substantially advanced autonomous software engineering (SWE), but their growing inference energy demands raise sustainability concerns. In this paper, we demonstrate that this cost is concentrated in an overlooked source: redundant output tokens generated across agents. Two empirical findings ground this claim. First, our per-token energy attribution for MAS reveals a sharp asymmetry: an output token consumes 30 to 1,000 times more energy than an input or cached token. Second, MAS inflate per-episode output because agents repeatedly re-explore overlapping repository regions. To address this inefficiency, we propose Librarian, a persistent search sub-agent that tracks repository-search history and suppresses redundant exploration actions across agents. By returning short references to file regions instead of full file excerpts, Librarian further reduces output-token volume. On SWE-Bench Verified, Librarian reduces per-episode GPU energy consumption of existing multi-agent SWE systems by up to 25% while preserving task performance.
Transductive Generalization via Optimal Transport and Its Application to Graph Node Classification
Mar 10, 2026Many existing transductive bounds rely on classical complexity measures that are computationally intractable and often misaligned with empirical behavior. In this work, we establish new representation-based generalization bounds in a distribution-free transductive setting, where learned representations are dependent, and test features are accessible during training. We derive global and class-wise bounds via optimal transport, expressed in terms of Wasserstein distances between encoded feature distributions. We demonstrate that our bounds are efficiently computable and strongly correlate with empirical generalization in graph node classification, improving upon classical complexity measures. Additionally, our analysis reveals how the GNN aggregation process transforms the representation distributions, inducing a trade-off between intra-class concentration and inter-class separation. This yields depth-dependent characterizations that capture the non-monotonic relationship between depth and generalization error observed in practice. The code is available at https://github.com/ml-postech/Transductive-OT-Gen-Bound.
Training-free Composition of Pre-trained GFlowNets for Multi-Objective Generation
Feb 25, 2026Generative Flow Networks (GFlowNets) learn to sample diverse candidates in proportion to a reward function, making them well-suited for scientific discovery, where exploring multiple promising solutions is crucial. Further extending GFlowNets to multi-objective settings has attracted growing interest since real-world applications often involve multiple, conflicting objectives. However, existing approaches require additional training for each set of objectives, limiting their applicability and incurring substantial computational overhead. We propose a training-free mixing policy that composes pre-trained GFlowNets at inference time, enabling rapid adaptation without finetuning or retraining. Importantly, our framework is flexible, capable of handling diverse reward combinations ranging from linear scalarization to complex non-linear logical operators, which are often handled separately in previous literature. We prove that our method exactly recovers the target distribution for linear scalarization and quantify the approximation quality for nonlinear operators through a distortion factor. Experiments on a synthetic 2D grid and real-world molecule-generation tasks demonstrate that our approach achieves performance comparable to baselines that require additional training.
In-Place Feedback: A New Paradigm for Guiding LLMs in Multi-Turn Reasoning
Oct 01, 2025Large language models (LLMs) are increasingly studied in the context of multi-turn reasoning, where models iteratively refine their outputs based on user-provided feedback. Such settings are crucial for tasks that require complex reasoning, yet existing feedback paradigms often rely on issuing new messages. LLMs struggle to integrate these reliably, leading to inconsistent improvements. In this work, we introduce in-place feedback, a novel interaction paradigm in which users directly edit an LLM's previous response, and the model conditions on this modified response to generate its revision. Empirical evaluations on diverse reasoning-intensive benchmarks reveal that in-place feedback achieves better performance than conventional multi-turn feedback while using $79.1\%$ fewer tokens. Complementary analyses on controlled environments further demonstrate that in-place feedback resolves a core limitation of multi-turn feedback: models often fail to apply feedback precisely to erroneous parts of the response, leaving errors uncorrected and sometimes introducing new mistakes into previously correct content. These findings suggest that in-place feedback offers a more natural and effective mechanism for guiding LLMs in reasoning-intensive tasks.
Plane Geometry Problem Solving with Multi-modal Reasoning: A Survey
May 20, 2025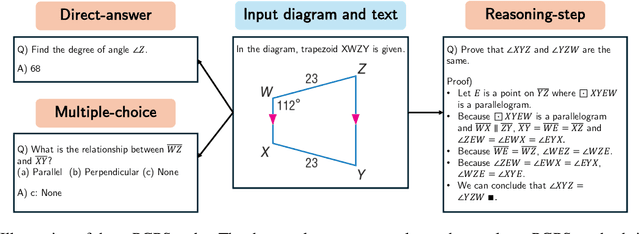
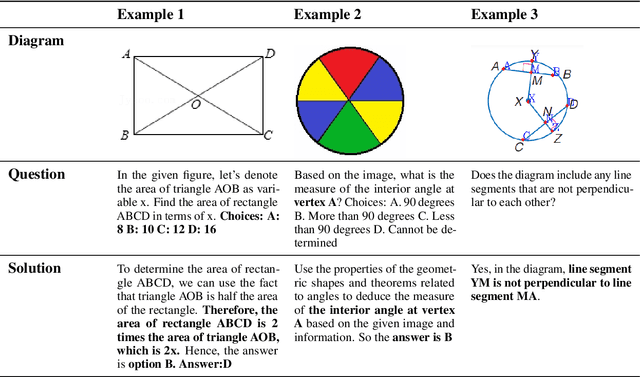
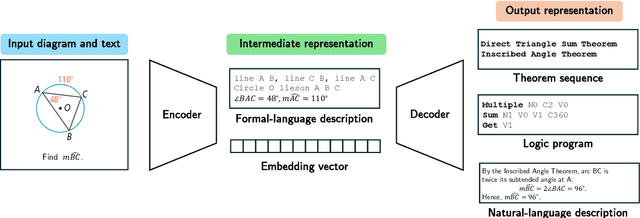
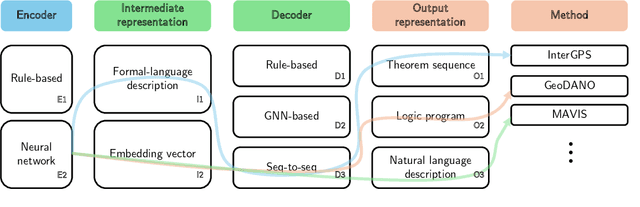
Plane geometry problem solving (PGPS) has recently gained significant attention as a benchmark to assess the multi-modal reasoning capabilities of large vision-language models. Despite the growing interest in PGPS, the research community still lacks a comprehensive overview that systematically synthesizes recent work in PGPS. To fill this gap, we present a survey of existing PGPS studies. We first categorize PGPS methods into an encoder-decoder framework and summarize the corresponding output formats used by their encoders and decoders. Subsequently, we classify and analyze these encoders and decoders according to their architectural designs. Finally, we outline major challenges and promising directions for future research. In particular, we discuss the hallucination issues arising during the encoding phase within encoder-decoder architectures, as well as the problem of data leakage in current PGPS benchmarks.
CoPL: Collaborative Preference Learning for Personalizing LLMs
Mar 03, 2025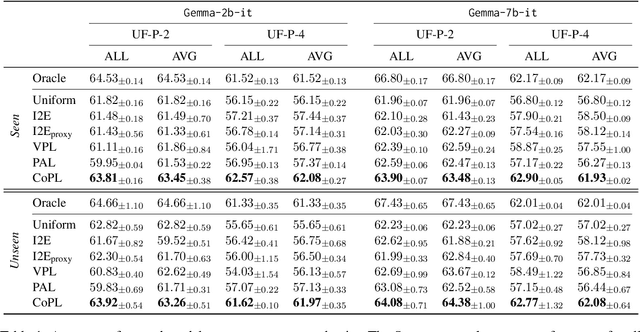


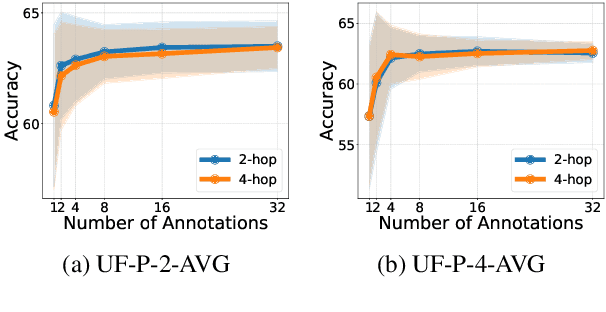
Personalizing large language models (LLMs) is important for aligning outputs with diverse user preferences, yet existing methods struggle with flexibility and generalization. We propose CoPL (Collaborative Preference Learning), a graph-based collaborative filtering framework that models user-response relationships to enhance preference estimation, particularly in sparse annotation settings. By integrating a mixture of LoRA experts, CoPL efficiently fine-tunes LLMs while dynamically balancing shared and user-specific preferences. Additionally, an optimization-free adaptation strategy enables generalization to unseen users without fine-tuning. Experiments on UltraFeedback-P demonstrate that CoPL outperforms existing personalized reward models, effectively capturing both common and controversial preferences, making it a scalable solution for personalized LLM alignment.
GeoDANO: Geometric VLM with Domain Agnostic Vision Encoder
Feb 17, 2025We introduce GeoDANO, a geometric vision-language model (VLM) with a domain-agnostic vision encoder, for solving plane geometry problems. Although VLMs have been employed for solving geometry problems, their ability to recognize geometric features remains insufficiently analyzed. To address this gap, we propose a benchmark that evaluates the recognition of visual geometric features, including primitives such as dots and lines, and relations such as orthogonality. Our preliminary study shows that vision encoders often used in general-purpose VLMs, e.g., OpenCLIP, fail to detect these features and struggle to generalize across domains. We develop GeoCLIP, a CLIP based model trained on synthetic geometric diagram-caption pairs to overcome the limitation. Benchmark results show that GeoCLIP outperforms existing vision encoders in recognizing geometric features. We then propose our VLM, GeoDANO, which augments GeoCLIP with a domain adaptation strategy for unseen diagram styles. GeoDANO outperforms specialized methods for plane geometry problems and GPT-4o on MathVerse.
Curve Your Attention: Mixed-Curvature Transformers for Graph Representation Learning
Sep 08, 2023Real-world graphs naturally exhibit hierarchical or cyclical structures that are unfit for the typical Euclidean space. While there exist graph neural networks that leverage hyperbolic or spherical spaces to learn representations that embed such structures more accurately, these methods are confined under the message-passing paradigm, making the models vulnerable against side-effects such as oversmoothing and oversquashing. More recent work have proposed global attention-based graph Transformers that can easily model long-range interactions, but their extensions towards non-Euclidean geometry are yet unexplored. To bridge this gap, we propose Fully Product-Stereographic Transformer, a generalization of Transformers towards operating entirely on the product of constant curvature spaces. When combined with tokenized graph Transformers, our model can learn the curvature appropriate for the input graph in an end-to-end fashion, without the need of additional tuning on different curvature initializations. We also provide a kernelized approach to non-Euclidean attention, which enables our model to run in time and memory cost linear to the number of nodes and edges while respecting the underlying geometry. Experiments on graph reconstruction and node classification demonstrate the benefits of generalizing Transformers to the non-Euclidean domain.
Feature Unlearning for Generative Models via Implicit Feedback
Mar 10, 2023

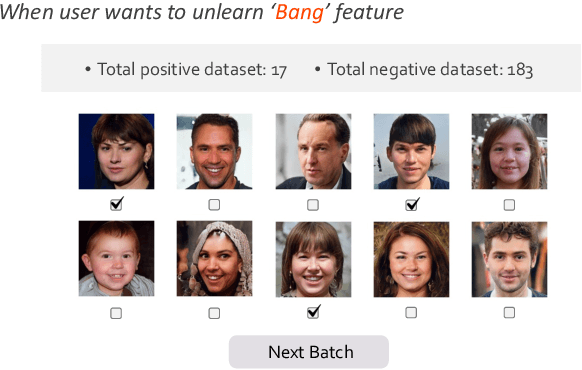

We tackle the problem of feature unlearning from a pretrained image generative model. Unlike a common unlearning task where an unlearning target is a subset of the training set, we aim to unlearn a specific feature, such as hairstyle from facial images, from the pretrained generative models. As the target feature is only presented in a local region of an image, unlearning the entire image from the pretrained model may result in losing other details in the remaining region of the image. To specify which features to unlearn, we develop an implicit feedback mechanism where a user can select images containing the target feature. From the implicit feedback, we identify a latent representation corresponding to the target feature and then use the representation to unlearn the generative model. Our framework is generalizable for the two well-known families of generative models: GANs and VAEs. Through experiments on MNIST and CelebA datasets, we show that target features are successfully removed while keeping the fidelity of the original models.
GM-VAE: Representation Learning with VAE on Gaussian Manifold
Sep 30, 2022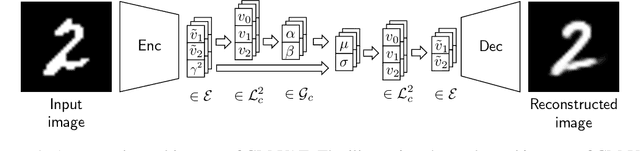

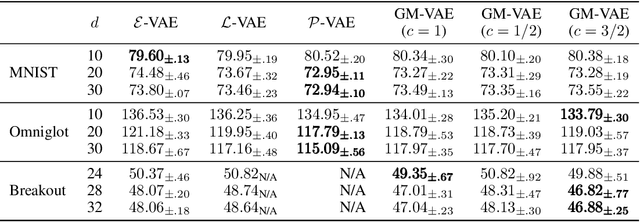

We propose a Gaussian manifold variational auto-encoder (GM-VAE) whose latent space consists of a set of diagonal Gaussian distributions. It is known that the set of the diagonal Gaussian distributions with the Fisher information metric forms a product hyperbolic space, which we call a Gaussian manifold. To learn the VAE endowed with the Gaussian manifold, we first propose a pseudo Gaussian manifold normal distribution based on the Kullback-Leibler divergence, a local approximation of the squared Fisher-Rao distance, to define a density over the latent space. With the newly proposed distribution, we introduce geometric transformations at the last and the first of the encoder and the decoder of VAE, respectively to help the transition between the Euclidean and Gaussian manifolds. Through the empirical experiments, we show competitive generalization performance of GM-VAE against other variants of hyperbolic- and Euclidean-VAEs. Our model achieves strong numerical stability, which is a common limitation reported with previous hyperbolic-VAEs.