 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-Place Feedback: A New Paradigm for Guiding LLMs in Multi-Turn Reasoning
Oct 01, 2025Large language models (LLMs) are increasingly studied in the context of multi-turn reasoning, where models iteratively refine their outputs based on user-provided feedback. Such settings are crucial for tasks that require complex reasoning, yet existing feedback paradigms often rely on issuing new messages. LLMs struggle to integrate these reliably, leading to inconsistent improvements. In this work, we introduce in-place feedback, a novel interaction paradigm in which users directly edit an LLM's previous response, and the model conditions on this modified response to generate its revision. Empirical evaluations on diverse reasoning-intensive benchmarks reveal that in-place feedback achieves better performance than conventional multi-turn feedback while using $79.1\%$ fewer tokens. Complementary analyses on controlled environments further demonstrate that in-place feedback resolves a core limitation of multi-turn feedback: models often fail to apply feedback precisely to erroneous parts of the response, leaving errors uncorrected and sometimes introducing new mistakes into previously correct content. These findings suggest that in-place feedback offers a more natural and effective mechanism for guiding LLMs in reasoning-intensive tasks.
Plane Geometry Problem Solving with Multi-modal Reasoning: A Survey
May 20, 2025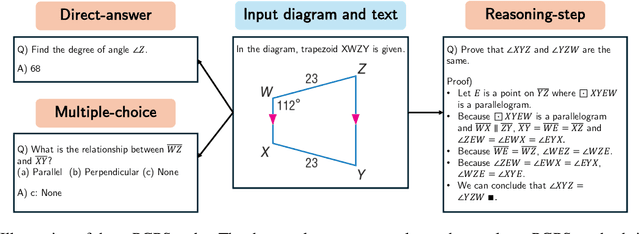
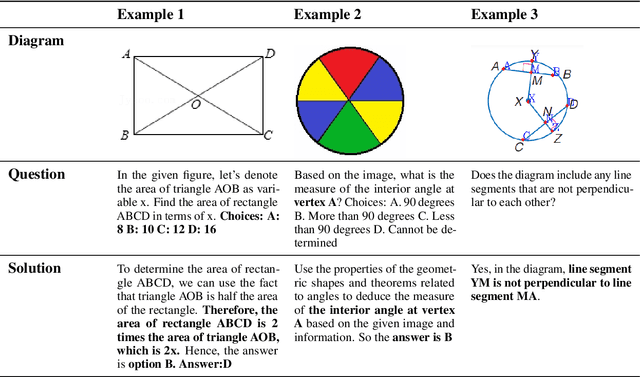
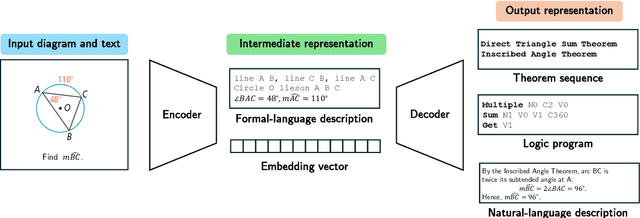
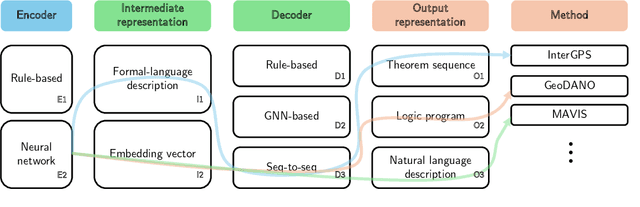
Plane geometry problem solving (PGPS) has recently gained significant attention as a benchmark to assess the multi-modal reasoning capabilities of large vision-language models. Despite the growing interest in PGPS, the research community still lacks a comprehensive overview that systematically synthesizes recent work in PGPS. To fill this gap, we present a survey of existing PGPS studies. We first categorize PGPS methods into an encoder-decoder framework and summarize the corresponding output formats used by their encoders and decoders. Subsequently, we classify and analyze these encoders and decoders according to their architectural designs. Finally, we outline major challenges and promising directions for future research. In particular, we discuss the hallucination issues arising during the encoding phase within encoder-decoder architectures, as well as the problem of data leakage in current PGPS benchmarks.
CoPL: Collaborative Preference Learning for Personalizing LLMs
Mar 03, 2025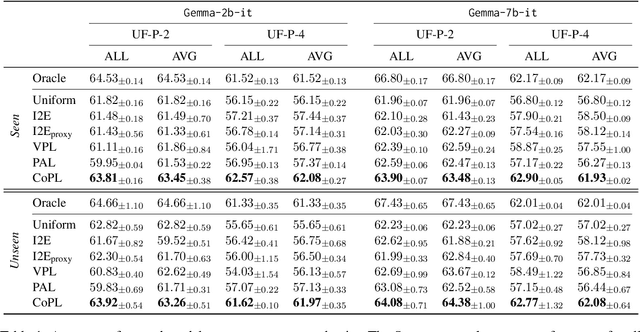


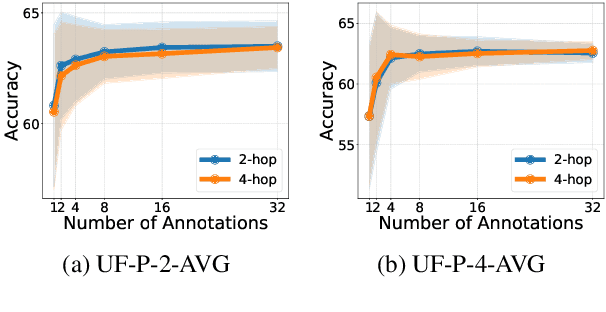
Personalizing large language models (LLMs) is important for aligning outputs with diverse user preferences, yet existing methods struggle with flexibility and generalization. We propose CoPL (Collaborative Preference Learning), a graph-based collaborative filtering framework that models user-response relationships to enhance preference estimation, particularly in sparse annotation settings. By integrating a mixture of LoRA experts, CoPL efficiently fine-tunes LLMs while dynamically balancing shared and user-specific preferences. Additionally, an optimization-free adaptation strategy enables generalization to unseen users without fine-tuning. Experiments on UltraFeedback-P demonstrate that CoPL outperforms existing personalized reward models, effectively capturing both common and controversial preferences, making it a scalable solution for personalized LLM alignment.
GeoDANO: Geometric VLM with Domain Agnostic Vision Encoder
Feb 17, 2025We introduce GeoDANO, a geometric vision-language model (VLM) with a domain-agnostic vision encoder, for solving plane geometry problems. Although VLMs have been employed for solving geometry problems, their ability to recognize geometric features remains insufficiently analyzed. To address this gap, we propose a benchmark that evaluates the recognition of visual geometric features, including primitives such as dots and lines, and relations such as orthogonality. Our preliminary study shows that vision encoders often used in general-purpose VLMs, e.g., OpenCLIP, fail to detect these features and struggle to generalize across domains. We develop GeoCLIP, a CLIP based model trained on synthetic geometric diagram-caption pairs to overcome the limitation. Benchmark results show that GeoCLIP outperforms existing vision encoders in recognizing geometric features. We then propose our VLM, GeoDANO, which augments GeoCLIP with a domain adaptation strategy for unseen diagram styles. GeoDANO outperforms specialized methods for plane geometry problems and GPT-4o on MathVerse.
SpReME: Sparse Regression for Multi-Environment Dynamic Systems
Feb 12, 2023



Learning dynamical systems is a promising avenue for scientific discoveries. However, capturing the governing dynamics in multiple environments still remains a challenge: model-based approaches rely on the fidelity of assumptions made for a single environment, whereas data-driven approaches based on neural networks are often fragile on extrapolating into the future. In this work, we develop a method of sparse regression dubbed SpReME to discover the major dynamics that underlie multiple environments. Specifically, SpReME shares a sparse structure of ordinary differential equation (ODE) across different environments in common while allowing each environment to keep the coefficients of ODE terms independently. We demonstrate that the proposed model captures the correct dynamics from multiple environments over four different dynamic systems with improved prediction performance.