 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCHyLL: Learning Continuous Neural Representations of Hybrid Systems
Dec 10, 2025Learning the flows of hybrid systems that have both continuous and discrete time dynamics is challenging. The existing method learns the dynamics in each discrete mode, which suffers from the combination of mode switching and discontinuities in the flows. In this work, we propose CHyLL (Continuous Hybrid System Learning in Latent Space), which learns a continuous neural representation of a hybrid system without trajectory segmentation, event functions, or mode switching. The key insight of CHyLL is that the reset map glues the state space at the guard surface, reformulating the state space as a piecewise smooth quotient manifold where the flow becomes spatially continuous. Building upon these insights and the embedding theorems grounded in differential topology, CHyLL concurrently learns a singularity-free neural embedding in a higher-dimensional space and the continuous flow in it. We showcase that CHyLL can accurately predict the flow of hybrid systems with superior accuracy and identify the topological invariants of the hybrid systems. Finally, we apply CHyLL to the stochastic optimal control problem.
Riemannian Direct Trajectory Optimization of Rigid Bodies on Matrix Lie Groups
May 05, 2025



Designing dynamically feasible trajectories for rigid bodies is a fundamental problem in robotics. Although direct trajectory optimization is widely applied to solve this problem, inappropriate parameterizations of rigid body dynamics often result in slow convergence and violations of the intrinsic topological structure of the rotation group. This paper introduces a Riemannian optimization framework for direct trajectory optimization of rigid bodies. We first use the Lie Group Variational Integrator to formulate the discrete rigid body dynamics on matrix Lie groups. We then derive the closed-form first- and second-order Riemannian derivatives of the dynamics. Finally, this work applies a line-search Riemannian Interior Point Method (RIPM) to perform trajectory optimization with general nonlinear constraints. As the optimization is performed on matrix Lie groups, it is correct-by-construction to respect the topological structure of the rotation group and be free of singularities. The paper demonstrates that both the derivative evaluations and Newton steps required to solve the RIPM exhibit linear complexity with respect to the planning horizon and system degrees of freedom. Simulation results illustrate that the proposed method is faster than conventional methods by an order of magnitude in challenging robotics tasks.
Discrete-Time Hybrid Automata Learning: Legged Locomotion Meets Skateboarding
Mar 03, 2025This paper introduces Discrete-time Hybrid Automata Learning (DHAL), a framework using on-policy Reinforcement Learning to identify and execute mode-switching without trajectory segmentation or event function learning. Hybrid dynamical systems, which include continuous flow and discrete mode switching, can model robotics tasks like legged robot locomotion. Model-based methods usually depend on predefined gaits, while model-free approaches lack explicit mode-switching knowledge. Current methods identify discrete modes via segmentation before regressing continuous flow, but learning high-dimensional complex rigid body dynamics without trajectory labels or segmentation is a challenging open problem. Our approach incorporates a beta policy distribution and a multi-critic architecture to model contact-guided motions, exemplified by a challenging quadrupedal robot skateboard task. We validate our method through simulations and real-world tests, demonstrating robust performance in hybrid dynamical systems.
Legged Robot State Estimation within Non-inertial Environments
Mar 24, 2024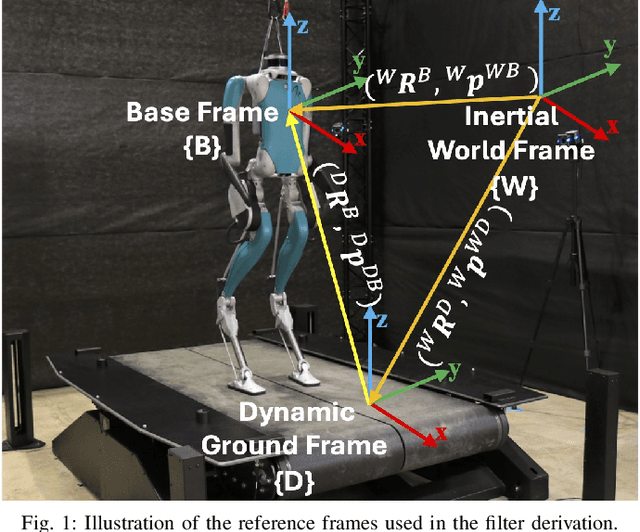
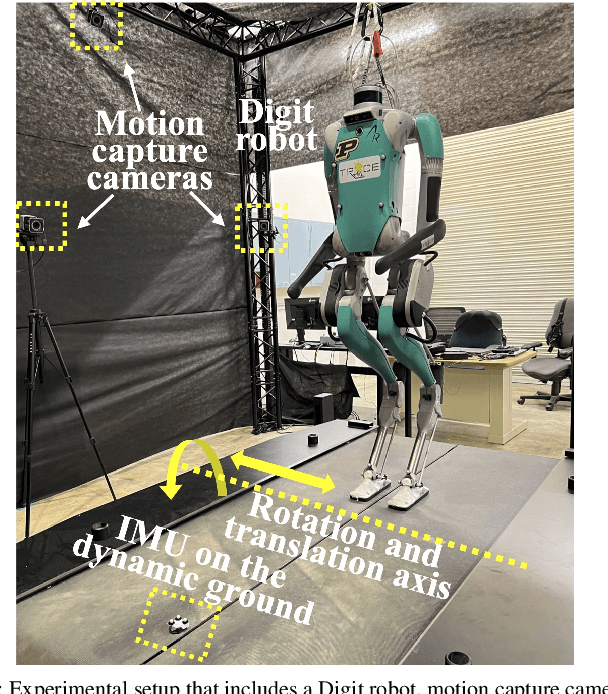
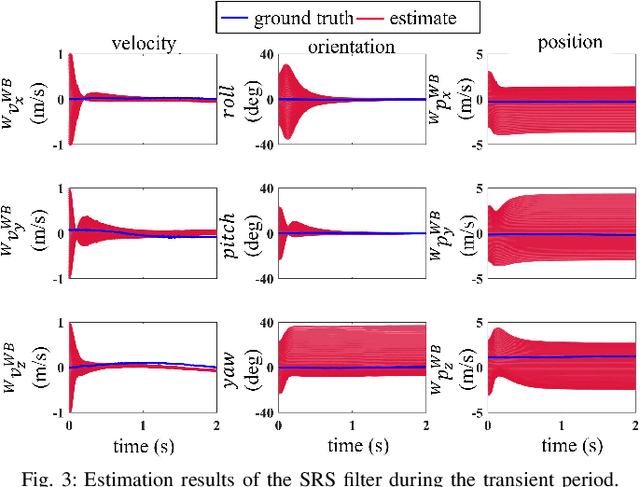
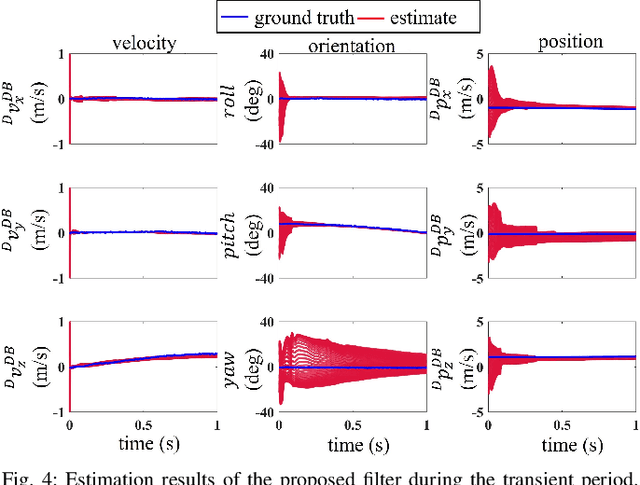
This paper investigates the robot state estimation problem within a non-inertial environment. The proposed state estimation approach relaxes the common assumption of static ground in the system modeling. The process and measurement models explicitly treat the movement of the non-inertial environments without requiring knowledge of its motion in the inertial frame or relying on GPS or sensing environmental landmarks. Further, the proposed state estimator is formulated as an invariant extended Kalman filter (InEKF) with the deterministic part of its process model obeying the group-affine property, leading to log-linear error dynamics. The observability analysis of the filter confirms that the robot's pose (i.e., position and orientation) and velocity relative to the non-inertial environment are observable. Hardware experiments on a humanoid robot moving on a rotating and translating treadmill demonstrate the high convergence rate and accuracy of the proposed InEKF even under significant treadmill pitch sway, as well as large estimation errors.
GMKF: Generalized Moment Kalman Filter for Polynomial Systems with Arbitrary Noise
Mar 08, 2024



This paper develops a new filtering approach for state estimation in polynomial systems corrupted by arbitrary noise, which commonly arise in robotics. We first consider a batch setup where we perform state estimation using all data collected from the initial to the current time. We formulate the batch state estimation problem as a Polynomial Optimization Problem (POP) and relax the assumption of Gaussian noise by specifying a finite number of moments of the noise. We solve the resulting POP using a moment relaxation and prove that under suitable conditions on the rank of the relaxation, (i) we can extract a provably optimal estimate from the moment relaxation, and (ii) we can obtain a belief representation from the dual (sum-of-squares) relaxation. We then turn our attention to the filtering setup and apply similar insights to develop a GMKF for recursive state estimation in polynomial systems with arbitrary noise. The GMKF formulates the prediction and update steps as POPs and solves them using moment relaxations, carrying over a possibly non-Gaussian belief. In the linear-Gaussian case, GMKF reduces to the standard Kalman Filter. We demonstrate that GMKF performs well under highly non-Gaussian noise and outperforms common alternatives, including the Extended and Unscented Kalman Filter, and their variants on matrix Lie group.
Convex Geometric Motion Planning on Lie Groups via Moment Relaxation
May 23, 2023This paper reports a novel result: with proper robot models on matrix Lie groups, one can formulate the kinodynamic motion planning problem for rigid body systems as \emph{exact} polynomial optimization problems that can be relaxed as semidefinite programming (SDP). Due to the nonlinear rigid body dynamics, the motion planning problem for rigid body systems is nonconvex. Existing global optimization-based methods do not properly deal with the configuration space of the 3D rigid body; thus, they do not scale well to long-horizon planning problems. We use Lie groups as the configuration space in our formulation and apply the variational integrator to formulate the forced rigid body systems as quadratic polynomials. Then we leverage Lasserre's hierarchy to obtain the globally optimal solution via SDP. By constructing the motion planning problem in a sparse manner, the results show that the proposed algorithm has \emph{linear} complexity with respect to the planning horizon. This paper demonstrates the proposed method can provide rank-one optimal solutions at relaxation order two for most of the testing cases of 1) 3D drone landing using the full dynamics model and 2) inverse kinematics for serial manipulators.
Convex Geometric Trajectory Tracking using Lie Algebraic MPC for Autonomous Marine Vehicles
May 15, 2023



Controlling marine vehicles in challenging environments is a complex task due to the presence of nonlinear hydrodynamics and uncertain external disturbances. Despite nonlinear model predictive control (MPC) showing potential in addressing these issues, its practical implementation is often constrained by computational limitations. In this paper, we propose an efficient controller for trajectory tracking of marine vehicles by employing a convex error-state MPC on the Lie group. By leveraging the inherent geometric properties of the Lie group, we can construct globally valid error dynamics and formulate a quadratic programming-based optimization problem. Our proposed MPC demonstrates effectiveness in trajectory tracking through extensive-numerical simulations, including scenarios involving ocean currents. Notably, our method substantially reduces computation time compared to nonlinear MPC, making it well-suited for real-time control applications with long prediction horizons or involving small marine vehicles.
Fully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer
Sep 29, 2022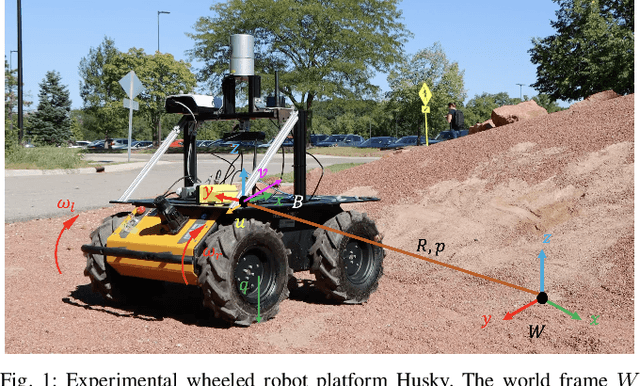
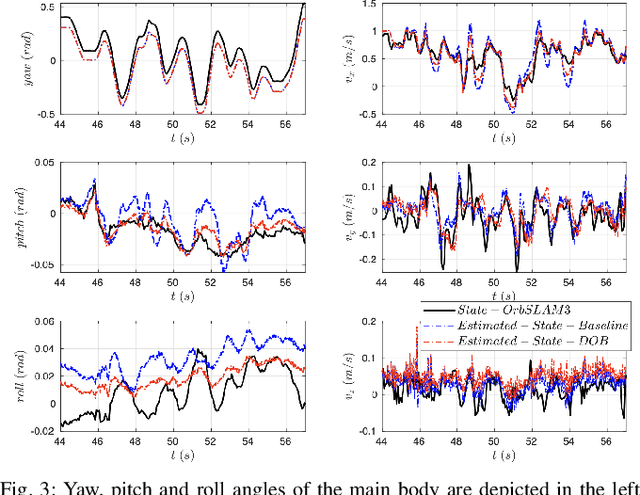
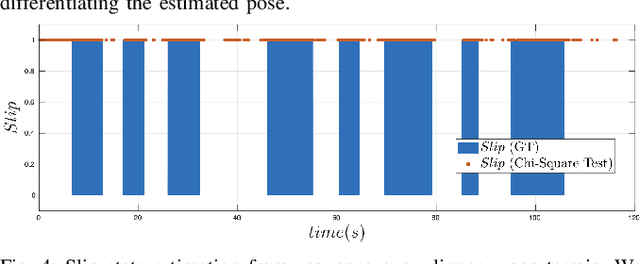

This paper develops a novel slip estimator using the invariant observer design theory and Disturbance Observer (DOB). The proposed state estimator for mobile robots is fully proprioceptive and combines data from an inertial measurement unit and body velocity within a Right Invariant Extended Kalman Filter (RI-EKF). By embedding the slip velocity into $\mathrm{SE}_3(3)$ Lie group, the developed DOB-based RI-EKF provides real-time accurate velocity and slip velocity estimates on different terrains. Experimental results using a Husky wheeled robot confirm the mathematical derivations and show better performance than a standard RI-EKF baseline. Open source software is available for download and reproducing the presented results.
Lie Algebraic Cost Function Design for Control on Lie Groups
Apr 20, 2022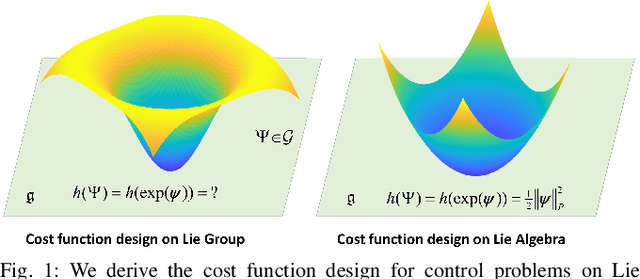
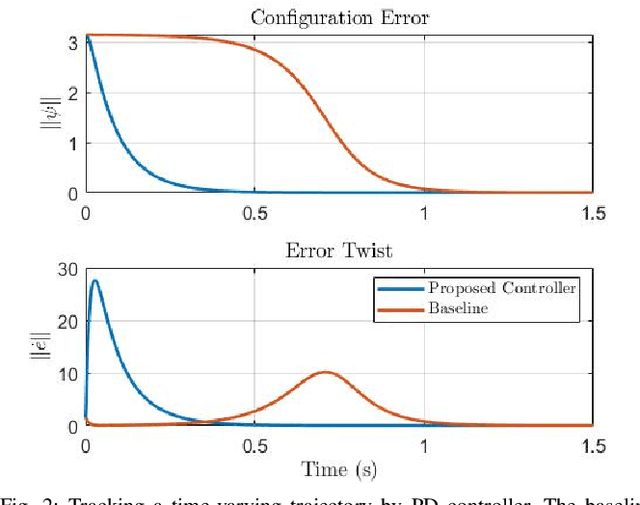
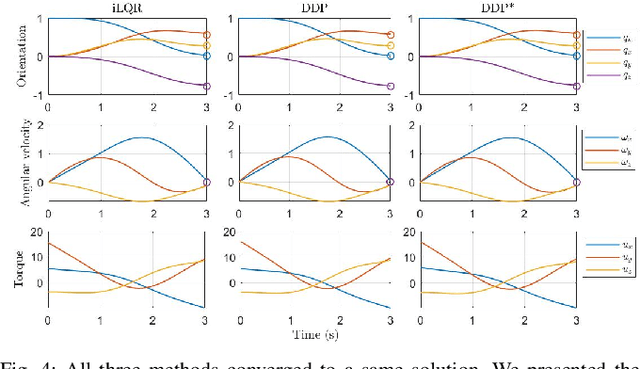
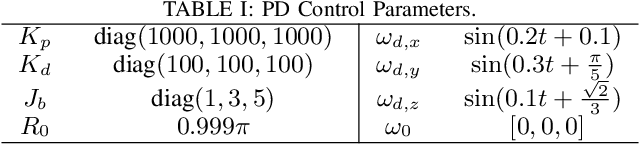
This paper presents a control framework on Lie groups by designing the control objective in its Lie algebra. Control on Lie groups is challenging due to its nonlinear nature and difficulties in system parameterization. Existing methods to design the control objective on a Lie group and then derive the gradient for controller design are non-trivial and can result in slow convergence in tracking control. We show that with a proper left-invariant metric, setting the gradient of the cost function as the tracking error in the Lie algebra leads to a quadratic Lyapunov function that enables globally exponential convergence. In the PD control case, we show that our controller can maintain an exponential convergence rate even when the initial error is approaching $\pi$ in SO(3). We also show the merit of this proposed framework in trajectory optimization. The proposed cost function enables the iterative Linear Quadratic Regulator (iLQR) to converge much faster than the Differential Dynamic Programming (DDP) with a well-adopted cost function when the initial trajectory is poorly initialized on SO(3).
Input Influence Matrix Design for MIMO Discrete-Time Ultra-Local Model
Mar 16, 2022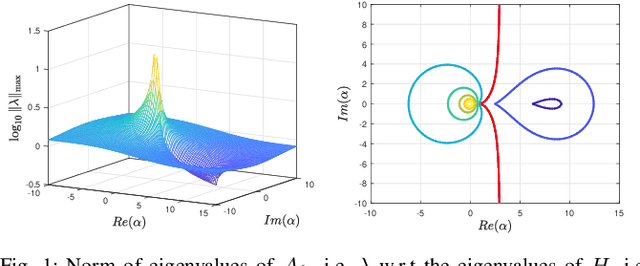
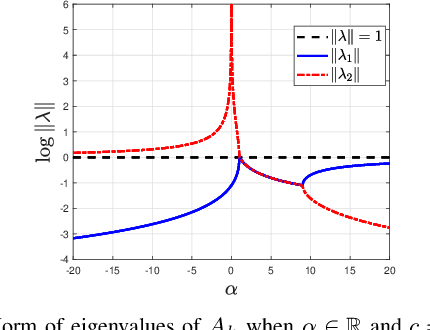
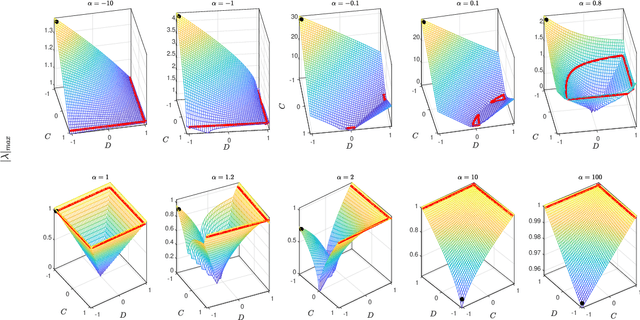
Ultra-Local Models (ULM) have been applied to perform model-free control of nonlinear systems with unknown or partially known dynamics. Unfortunately, extending these methods to MIMO systems requires designing a dense input influence matrix which is challenging. This paper presents guidelines for designing an input influence matrix for discrete-time, control-affine MIMO systems using an ULM-based controller. This paper analyzes the case that uses ULM and a model-free control scheme: the H\"older-continuous Finite-Time Stable (FTS) control. By comparing the ULM with the actual system dynamics, the paper describes how to extract the input-dependent part from the lumped ULM dynamics and finds that the tracking and state estimation error are coupled. The stability of the ULM-FTS error dynamics is affected by the eigenvalues of the difference (defined by matrix multiplication) between the actual and designed input influence matrix. Finally, the paper shows that a wide range of input influence matrix designs can keep the ULM-FTS error dynamics (at least locally) asymptotically stable. A numerical simulation is included to verify the result. The analysis can also be extended to other ULM-based controllers.