 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMorphology-Aware Graph Reinforcement Learning for Tensegrity Robot Locomotion
Oct 30, 2025Tensegrity robots combine rigid rods and elastic cables, offering high resilience and deployability but posing major challenges for locomotion control due to their underactuated and highly coupled dynamics. This paper introduces a morphology-aware reinforcement learning framework that integrates a graph neural network (GNN) into the Soft Actor-Critic (SAC) algorithm. By representing the robot's physical topology as a graph, the proposed GNN-based policy captures coupling among components, enabling faster and more stable learning than conventional multilayer perceptron (MLP) policies. The method is validated on a physical 3-bar tensegrity robot across three locomotion primitives, including straight-line tracking and bidirectional turning. It shows superior sample efficiency, robustness to noise and stiffness variations, and improved trajectory accuracy. Notably, the learned policies transfer directly from simulation to hardware without fine-tuning, achieving stable real-world locomotion. These results demonstrate the advantages of incorporating structural priors into reinforcement learning for tensegrity robot control.
Tensegrity Robot Proprioceptive State Estimation with Geometric Constraints
Oct 31, 2024Tensegrity robots, characterized by a synergistic assembly of rigid rods and elastic cables, form robust structures that are resistant to impacts. However, this design introduces complexities in kinematics and dynamics, complicating control and state estimation. This work presents a novel proprioceptive state estimator for tensegrity robots. The estimator initially uses the geometric constraints of 3-bar prism tensegrity structures, combined with IMU and motor encoder measurements, to reconstruct the robot's shape and orientation. It then employs a contact-aided invariant extended Kalman filter with forward kinematics to estimate the global position and orientation of the tensegrity robot. The state estimator's accuracy is assessed against ground truth data in both simulated environments and real-world tensegrity robot applications. It achieves an average drift percentage of 4.2%, comparable to the state estimation performance of traditional rigid robots. This state estimator advances the state of the art in tensegrity robot state estimation and has the potential to run in real-time using onboard sensors, paving the way for full autonomy of tensegrity robots in unstructured environments.
Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot
Sep 09, 2024Tensegrity robots excel in tasks requiring extreme levels of deformability and robustness. However, there are challenges in state estimation and payload versatility due to their high number of degrees of freedom and unconventional shape. This paper introduces a modular three-bar tensegrity robot featuring a customizable payload design. Our tensegrity robot employs a novel Quasi-Direct Drive (QDD) cable actuator paired with low-stretch polymer cables to achieve accurate proprioception without the need for external force or torque sensors. The design allows for on-the-fly stiffness tuning for better environment and payload adaptability. In this paper, we present the design, fabrication, assembly, and experimental results of the robot. Experimental data demonstrates the high accuracy cable length estimation (<1% error relative to bar length) and variable stiffness control of the cable actuator up to 7 times the minimum stiffness for self support. The presented tensegrity robot serves as a platform for future advancements in autonomous operation and open-source module design.
Proprioceptive Invariant Robot State Estimation
Nov 07, 2023



This paper reports on developing a real-time invariant proprioceptive robot state estimation framework called DRIFT. A didactic introduction to invariant Kalman filtering is provided to make this cutting-edge symmetry-preserving approach accessible to a broader range of robotics applications. Furthermore, this work dives into the development of a proprioceptive state estimation framework for dead reckoning that only consumes data from an onboard inertial measurement unit and kinematics of the robot, with two optional modules, a contact estimator and a gyro filter for low-cost robots, enabling a significant capability on a variety of robotics platforms to track the robot's state over long trajectories in the absence of perceptual data. Extensive real-world experiments using a legged robot, an indoor wheeled robot, a field robot, and a full-size vehicle, as well as simulation results with a marine robot, are provided to understand the limits of DRIFT.
Fully Proprioceptive Slip-Velocity-Aware State Estimation for Mobile Robots via Invariant Kalman Filtering and Disturbance Observer
Sep 29, 2022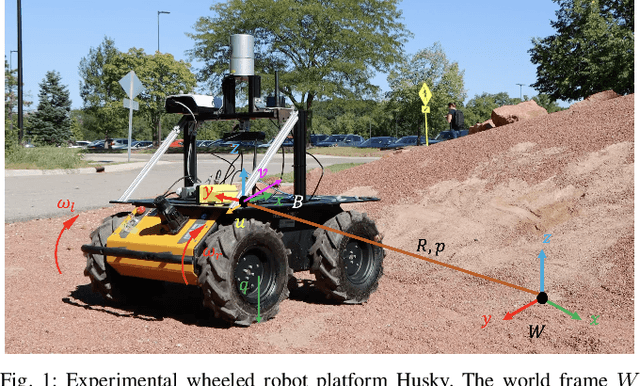
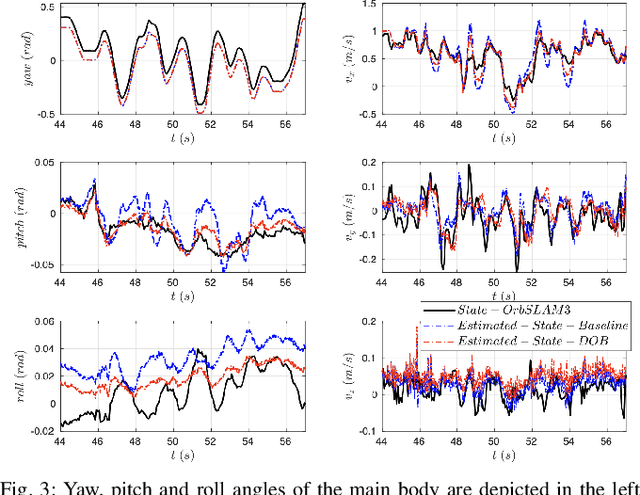
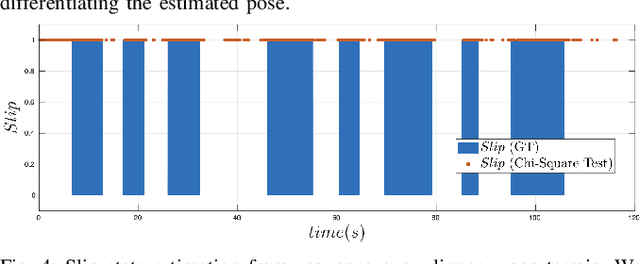

This paper develops a novel slip estimator using the invariant observer design theory and Disturbance Observer (DOB). The proposed state estimator for mobile robots is fully proprioceptive and combines data from an inertial measurement unit and body velocity within a Right Invariant Extended Kalman Filter (RI-EKF). By embedding the slip velocity into $\mathrm{SE}_3(3)$ Lie group, the developed DOB-based RI-EKF provides real-time accurate velocity and slip velocity estimates on different terrains. Experimental results using a Husky wheeled robot confirm the mathematical derivations and show better performance than a standard RI-EKF baseline. Open source software is available for download and reproducing the presented results.
Robotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction
Mar 26, 2021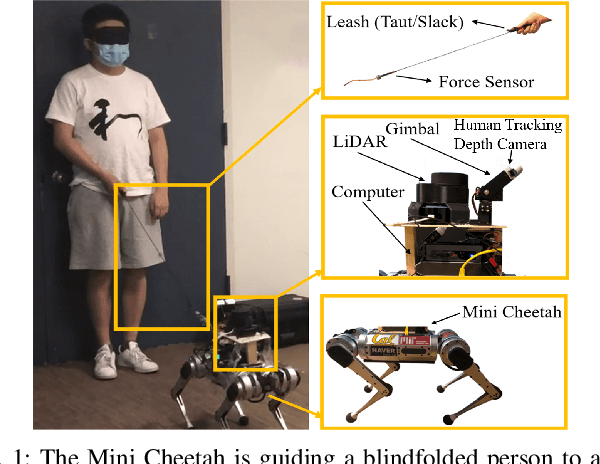
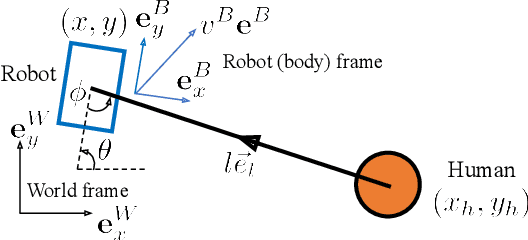
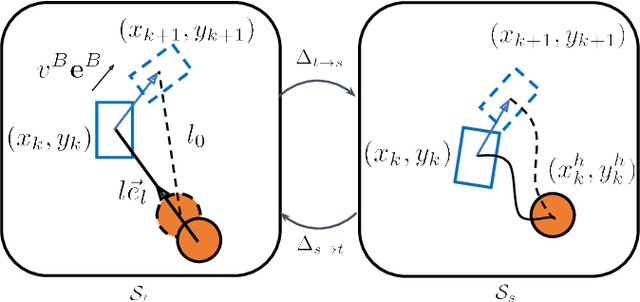
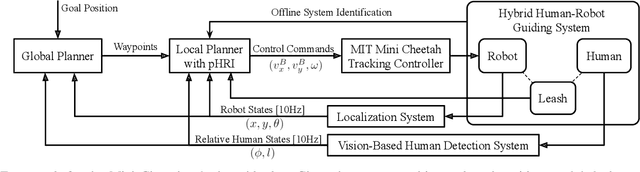
An autonomous robot that is able to physically guide humans through narrow and cluttered spaces could be a big boon to the visually-impaired. Most prior robotic guiding systems are based on wheeled platforms with large bases with actuated rigid guiding canes. The large bases and the actuated arms limit these prior approaches from operating in narrow and cluttered environments. We propose a method that introduces a quadrupedal robot with a leash to enable the robot-guiding human system to change its intrinsic dimension (by letting the leash go slack) in order to fit into narrow spaces. We propose a hybrid physical Human-Robot Interaction model that involves leash tension to describe the dynamical relationship in the robot-guiding human system. This hybrid model is utilized in a mixed-integer programming problem to develop a reactive planner that is able to utilize slack-taut switching to guide a blind-folded person to safely travel in a confined space. The proposed leash-guided robot framework is deployed on a Mini Cheetah quadrupedal robot and validated in experiments.