 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeREFINE-CONTROL: A Semi-supervised Distillation Method For Conditional Image Generation
Sep 26, 2025Conditional image generation models have achieved remarkable results by leveraging text-based control to generate customized images. However, the high resource demands of these models and the scarcity of well-annotated data have hindered their deployment on edge devices, leading to enormous costs and privacy concerns, especially when user data is sent to a third party. To overcome these challenges, we propose Refine-Control, a semi-supervised distillation framework. Specifically, we improve the performance of the student model by introducing a tri-level knowledge fusion loss to transfer different levels of knowledge. To enhance generalization and alleviate dataset scarcity, we introduce a semi-supervised distillation method utilizing both labeled and unlabeled data. Our experiments reveal that Refine-Control achieves significant reductions in computational cost and latency, while maintaining high-fidelity generation capabilities and controllability, as quantified by comparative metrics.
COPU: Conformal Prediction for Uncertainty Quantification in Natural Language Generation
Feb 18, 2025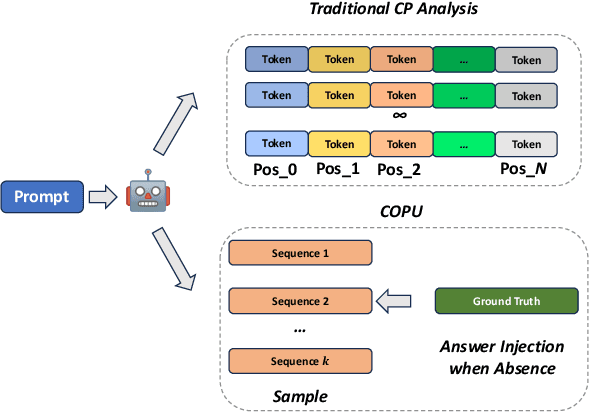
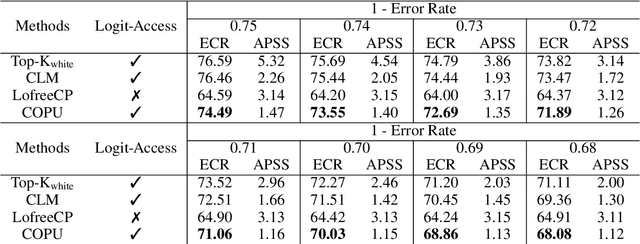


Uncertainty Quantification (UQ) for Natural Language Generation (NLG) is crucial for assessing the performance of Large Language Models (LLMs), as it reveals confidence in predictions, identifies failure modes, and gauges output reliability. Conformal Prediction (CP), a model-agnostic method that generates prediction sets with a specified error rate, has been adopted for UQ in classification tasks, where the size of the prediction set indicates the model's uncertainty. However, when adapting CP to NLG, the sampling-based method for generating candidate outputs cannot guarantee the inclusion of the ground truth, limiting its applicability across a wide range of error rates. To address this, we propose \ourmethod, a method that explicitly adds the ground truth to the candidate outputs and uses logit scores to measure nonconformity. Our experiments with six LLMs on four NLG tasks show that \ourmethod outperforms baseline methods in calibrating error rates and empirical cover rates, offering accurate UQ across a wide range of user-specified error rates.
Tensegrity Robot Proprioceptive State Estimation with Geometric Constraints
Oct 31, 2024Tensegrity robots, characterized by a synergistic assembly of rigid rods and elastic cables, form robust structures that are resistant to impacts. However, this design introduces complexities in kinematics and dynamics, complicating control and state estimation. This work presents a novel proprioceptive state estimator for tensegrity robots. The estimator initially uses the geometric constraints of 3-bar prism tensegrity structures, combined with IMU and motor encoder measurements, to reconstruct the robot's shape and orientation. It then employs a contact-aided invariant extended Kalman filter with forward kinematics to estimate the global position and orientation of the tensegrity robot. The state estimator's accuracy is assessed against ground truth data in both simulated environments and real-world tensegrity robot applications. It achieves an average drift percentage of 4.2%, comparable to the state estimation performance of traditional rigid robots. This state estimator advances the state of the art in tensegrity robot state estimation and has the potential to run in real-time using onboard sensors, paving the way for full autonomy of tensegrity robots in unstructured environments.
Hepatocellular Carcinoma Segmentation fromDigital Subtraction Angiography Videos usingLearnable Temporal Difference
Jul 09, 2021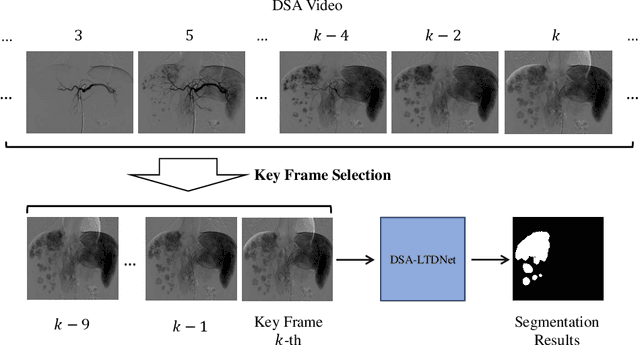

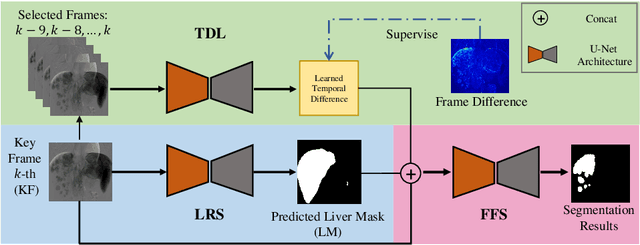

Automatic segmentation of hepatocellular carcinoma (HCC)in Digital Subtraction Angiography (DSA) videos can assist radiologistsin efficient diagnosis of HCC and accurate evaluation of tumors in clinical practice. Few studies have investigated HCC segmentation from DSAvideos. It shows great challenging due to motion artifacts in filming, ambiguous boundaries of tumor regions and high similarity in imaging toother anatomical tissues. In this paper, we raise the problem of HCCsegmentation in DSA videos, and build our own DSA dataset. We alsopropose a novel segmentation network called DSA-LTDNet, including asegmentation sub-network, a temporal difference learning (TDL) moduleand a liver region segmentation (LRS) sub-network for providing additional guidance. DSA-LTDNet is preferable for learning the latent motioninformation from DSA videos proactively and boosting segmentation performance. All of experiments are conducted on our self-collected dataset.Experimental results show that DSA-LTDNet increases the DICE scoreby nearly 4% compared to the U-Net baseline.