 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLayer-adaptive Expert Pruning for Pre-Training of Mixture-of-Experts Large Language Models
Jan 20, 2026Although Mixture-of-Experts (MoE) Large Language Models (LLMs) deliver superior accuracy with a reduced number of active parameters, their pre-training represents a significant computationally bottleneck due to underutilized experts and limited training efficiency. This work introduces a Layer-Adaptive Expert Pruning (LAEP) algorithm designed for the pre-training stage of MoE LLMs. In contrast to previous expert pruning approaches that operate primarily in the post-training phase, the proposed algorithm enhances training efficiency by selectively pruning underutilized experts and reorganizing experts across computing devices according to token distribution statistics. Comprehensive experiments demonstrate that LAEP effectively reduces model size and substantially improves pre-training efficiency. In particular, when pre-training the 1010B Base model from scratch, LAEP achieves a 48.3\% improvement in training efficiency alongside a 33.3% parameter reduction, while still delivering excellent performance across multiple domains.
Yuan3.0 Flash: An Open Multimodal Large Language Model for Enterprise Applications
Jan 05, 2026We introduce Yuan3.0 Flash, an open-source Mixture-of-Experts (MoE) MultiModal Large Language Model featuring 3.7B activated parameters and 40B total parameters, specifically designed to enhance performance on enterprise-oriented tasks while maintaining competitive capabilities on general-purpose tasks. To address the overthinking phenomenon commonly observed in Large Reasoning Models (LRMs), we propose Reflection-aware Adaptive Policy Optimization (RAPO), a novel RL training algorithm that effectively regulates overthinking behaviors. In enterprise-oriented tasks such as retrieval-augmented generation (RAG), complex table understanding, and summarization, Yuan3.0 Flash consistently achieves superior performance. Moreover, it also demonstrates strong reasoning capabilities in domains such as mathematics, science, etc., attaining accuracy comparable to frontier model while requiring only approximately 1/4 to 1/2 of the average tokens. Yuan3.0 Flash has been fully open-sourced to facilitate further research and real-world deployment: https://github.com/Yuan-lab-LLM/Yuan3.0.
COPU: Conformal Prediction for Uncertainty Quantification in Natural Language Generation
Feb 18, 2025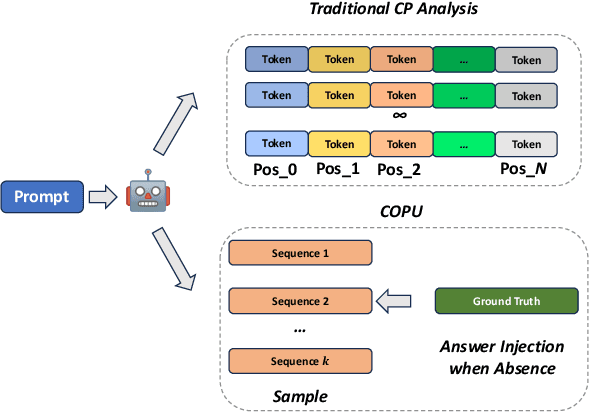
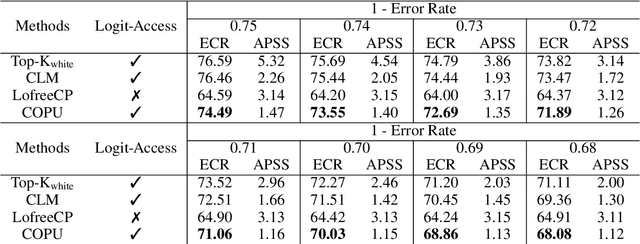


Uncertainty Quantification (UQ) for Natural Language Generation (NLG) is crucial for assessing the performance of Large Language Models (LLMs), as it reveals confidence in predictions, identifies failure modes, and gauges output reliability. Conformal Prediction (CP), a model-agnostic method that generates prediction sets with a specified error rate, has been adopted for UQ in classification tasks, where the size of the prediction set indicates the model's uncertainty. However, when adapting CP to NLG, the sampling-based method for generating candidate outputs cannot guarantee the inclusion of the ground truth, limiting its applicability across a wide range of error rates. To address this, we propose \ourmethod, a method that explicitly adds the ground truth to the candidate outputs and uses logit scores to measure nonconformity. Our experiments with six LLMs on four NLG tasks show that \ourmethod outperforms baseline methods in calibrating error rates and empirical cover rates, offering accurate UQ across a wide range of user-specified error rates.
Efficient first-order predictor-corrector multiple objective optimization for fair misinformation detection
Sep 15, 2022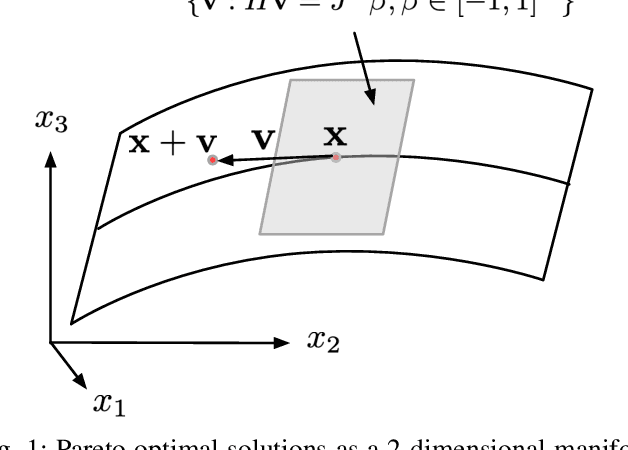
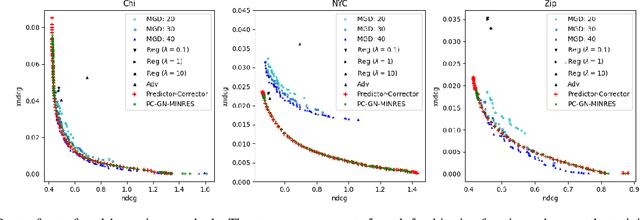
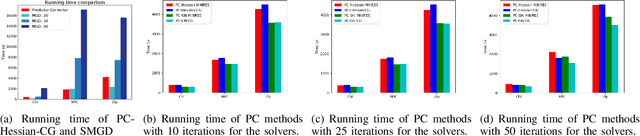
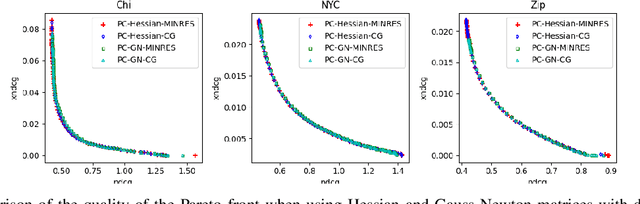
Multiple-objective optimization (MOO) aims to simultaneously optimize multiple conflicting objectives and has found important applications in machine learning, such as minimizing classification loss and discrepancy in treating different populations for fairness. At optimality, further optimizing one objective will necessarily harm at least another objective, and decision-makers need to comprehensively explore multiple optima (called Pareto front) to pinpoint one final solution. We address the efficiency of finding the Pareto front. First, finding the front from scratch using stochastic multi-gradient descent (SMGD) is expensive with large neural networks and datasets. We propose to explore the Pareto front as a manifold from a few initial optima, based on a predictor-corrector method. Second, for each exploration step, the predictor solves a large-scale linear system that scales quadratically in the number of model parameters and requires one backpropagation to evaluate a second-order Hessian-vector product per iteration of the solver. We propose a Gauss-Newton approximation that only scales linearly, and that requires only first-order inner-product per iteration. This also allows for a choice between the MINRES and conjugate gradient methods when approximately solving the linear system. The innovations make predictor-corrector possible for large networks. Experiments on multi-objective (fairness and accuracy) misinformation detection tasks show that 1) the predictor-corrector method can find Pareto fronts better than or similar to SMGD with less time; and 2) the proposed first-order method does not harm the quality of the Pareto front identified by the second-order method, while further reduce running time.
Environmental Sampling with the Boustrophedon Decomposition Algorithm
Jul 13, 2022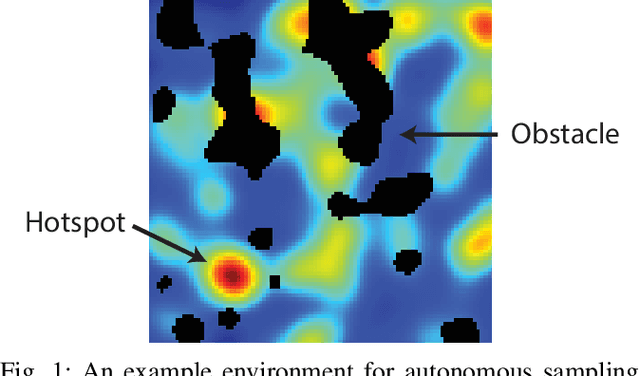
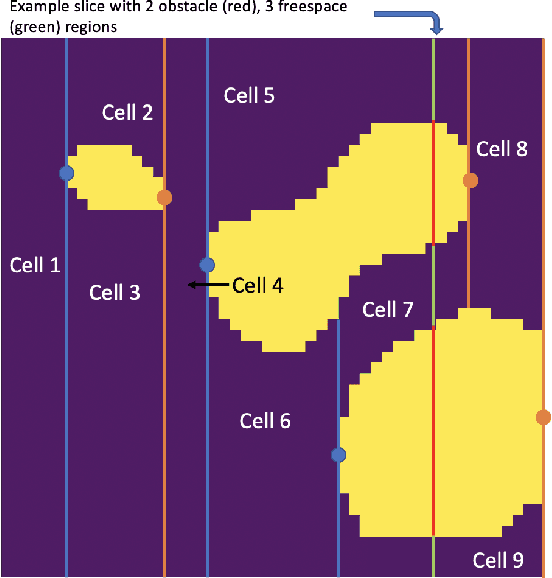

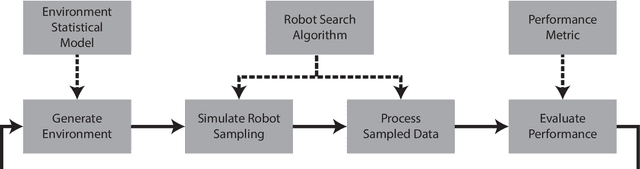
The automation of data collection via mobile robots holds promise for increasing the efficacy of environmental investigations, but requires the system to autonomously determine how to sample the environment while avoiding obstacles. Existing methods such as the boustrophedon decomposition algorithm enable complete coverage of the environment to a specified resolution, yet in many cases sampling at the resolution of the distribution would yield long paths with an infeasible number of measurements. Downsampling these paths can result in feasible plans at the expense of distribution estimation accuracy. This work explores this tradeoff between distribution accuracy and path length for the boustrophedon decomposition algorithm. We quantify algorithm performance by computing metrics for accuracy and path length in a Monte-Carlo simulation across a distribution of environments. We highlight conditions where one objective should be prioritized over the other and propose a modification to the algorithm to improve its effectiveness by sampling more uniformly. These results demonstrate how intelligent deployment of the boustrophedon algorithm can effectively guide autonomous environmental sampling.
Cumulative Assessment for Urban 3D Modeling
Jul 09, 2021

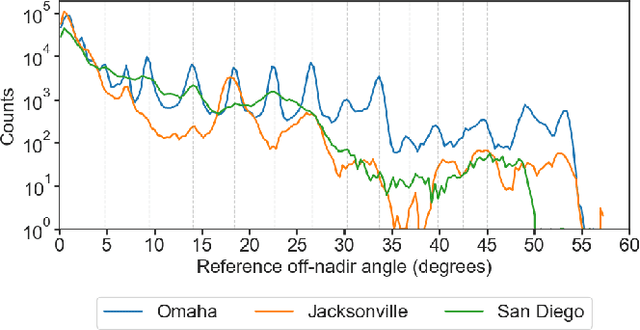
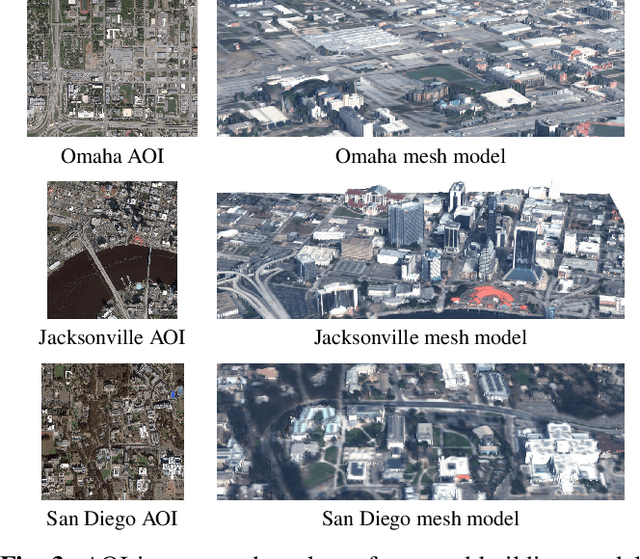
Urban 3D modeling from satellite images requires accurate semantic segmentation to delineate urban features, multiple view stereo for 3D reconstruction of surface heights, and 3D model fitting to produce compact models with accurate surface slopes. In this work, we present a cumulative assessment metric that succinctly captures error contributions from each of these components. We demonstrate our approach by providing challenging public datasets and extending two open source projects to provide an end-to-end 3D modeling baseline solution to stimulate further research and evaluation with a public leaderboard.
Semantic Stereo for Incidental Satellite Images
Nov 21, 2018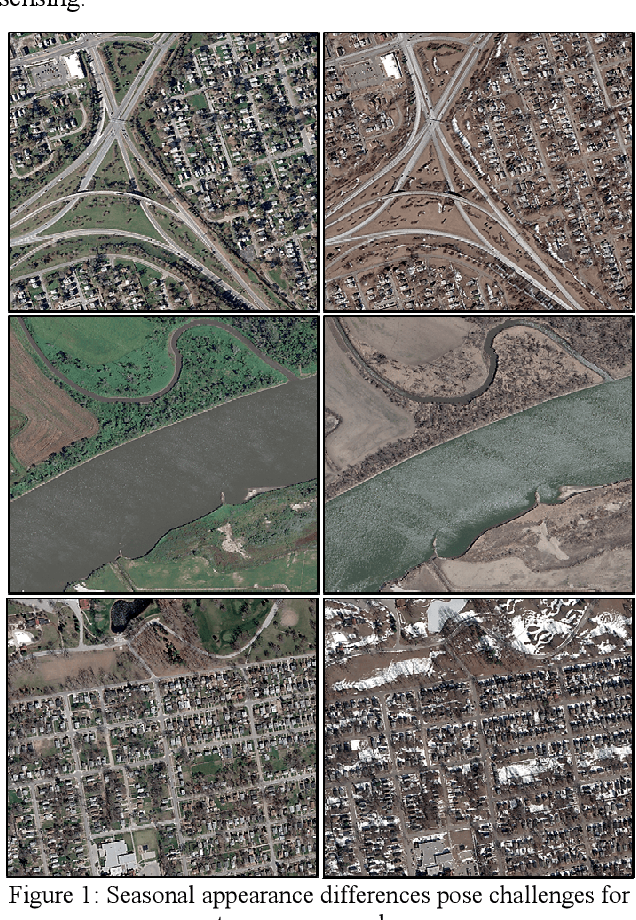
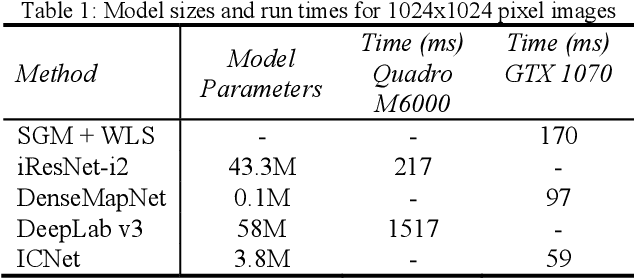
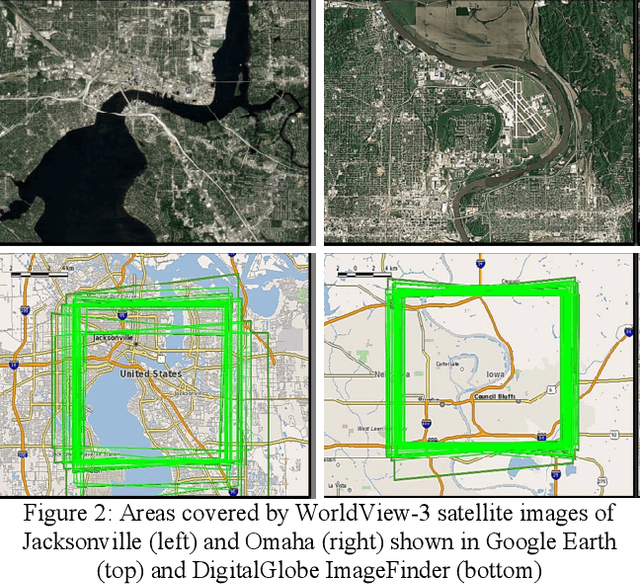
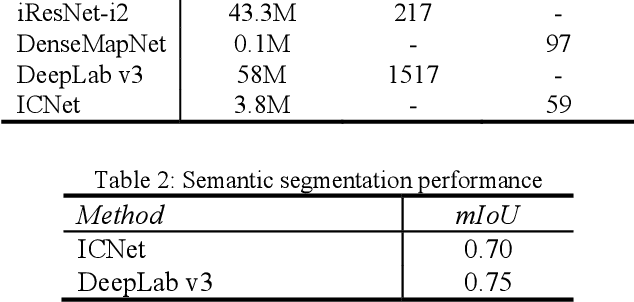
The increasingly common use of incidental satellite images for stereo reconstruction versus rigidly tasked binocular or trinocular coincident collection is helping to enable timely global-scale 3D mapping; however, reliable stereo correspondence from multi-date image pairs remains very challenging due to seasonal appearance differences and scene change. Promising recent work suggests that semantic scene segmentation can provide a robust regularizing prior for resolving ambiguities in stereo correspondence and reconstruction problems. To enable research for pairwise semantic stereo and multi-view semantic 3D reconstruction with incidental satellite images, we have established a large-scale public dataset including multi-view, multi-band satellite images and ground truth geometric and semantic labels for two large cities. To demonstrate the complementary nature of the stereo and segmentation tasks, we present lightweight public baselines adapted from recent state of the art convolutional neural network models and assess their performance.