 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArtificial Intelligence-based Clinical Decision Support for COVID-19 -- Where Art Thou?
Jun 05, 2020The COVID-19 crisis has brought about new clinical questions, new workflows, and accelerated distributed healthcare needs. While artificial intelligence (AI)-based clinical decision support seemed to have matured, the application of AI-based tools for COVID-19 has been limited to date. In this perspective piece, we identify opportunities and requirements for AI-based clinical decision support systems and highlight challenges that impact "AI readiness" for rapidly emergent healthcare challenges.
Semantic Stereo for Incidental Satellite Images
Nov 21, 2018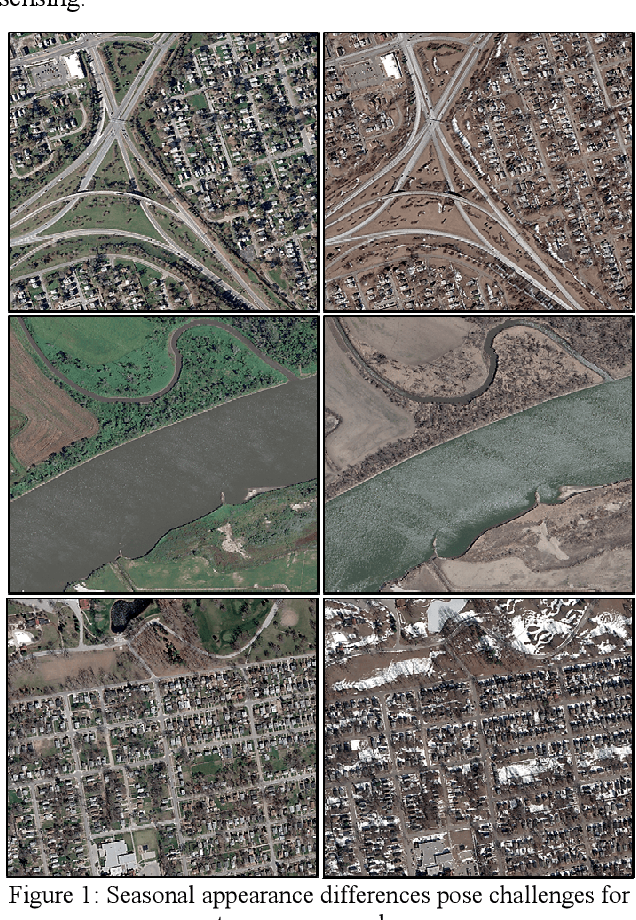
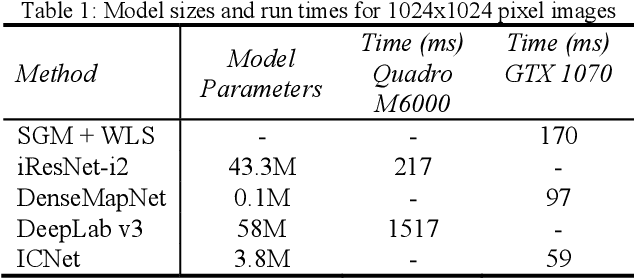
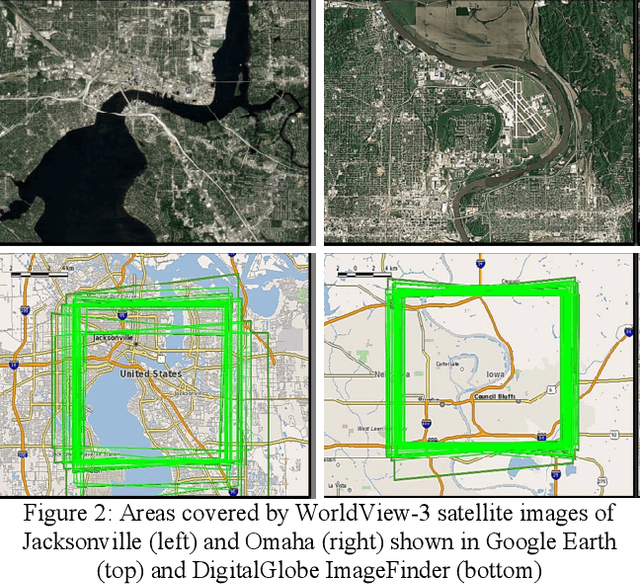
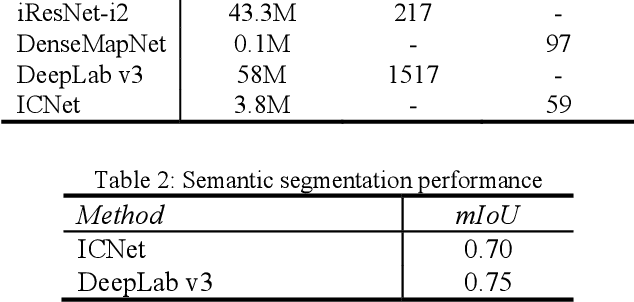
The increasingly common use of incidental satellite images for stereo reconstruction versus rigidly tasked binocular or trinocular coincident collection is helping to enable timely global-scale 3D mapping; however, reliable stereo correspondence from multi-date image pairs remains very challenging due to seasonal appearance differences and scene change. Promising recent work suggests that semantic scene segmentation can provide a robust regularizing prior for resolving ambiguities in stereo correspondence and reconstruction problems. To enable research for pairwise semantic stereo and multi-view semantic 3D reconstruction with incidental satellite images, we have established a large-scale public dataset including multi-view, multi-band satellite images and ground truth geometric and semantic labels for two large cities. To demonstrate the complementary nature of the stereo and segmentation tasks, we present lightweight public baselines adapted from recent state of the art convolutional neural network models and assess their performance.
Do What I Want, Not What I Did: Imitation of Skills by Planning Sequences of Actions
Dec 05, 2016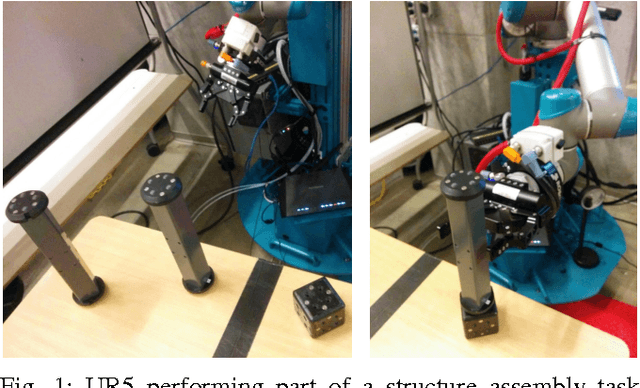
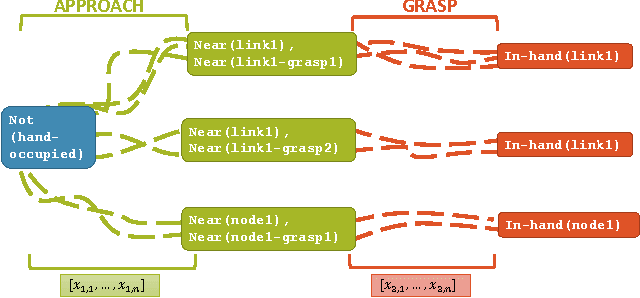
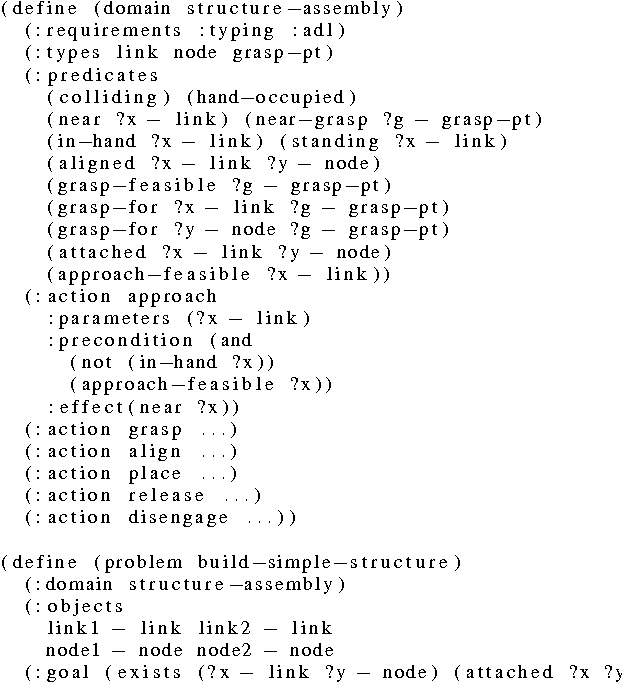
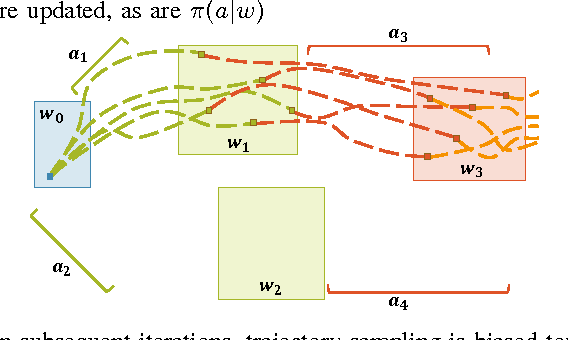
We propose a learning-from-demonstration approach for grounding actions from expert data and an algorithm for using these actions to perform a task in new environments. Our approach is based on an application of sampling-based motion planning to search through the tree of discrete, high-level actions constructed from a symbolic representation of a task. Recursive sampling-based planning is used to explore the space of possible continuous-space instantiations of these actions. We demonstrate the utility of our approach with a magnetic structure assembly task, showing that the robot can intelligently select a sequence of actions in different parts of the workspace and in the presence of obstacles. This approach can better adapt to new environments by selecting the correct high-level actions for the particular environment while taking human preferences into account.