 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDo What I Want, Not What I Did: Imitation of Skills by Planning Sequences of Actions
Paper and Code
Dec 05, 2016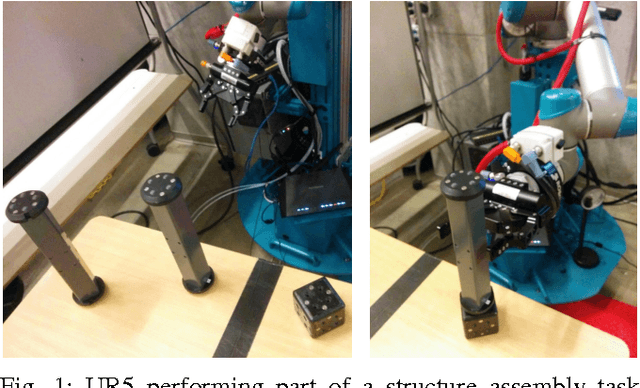
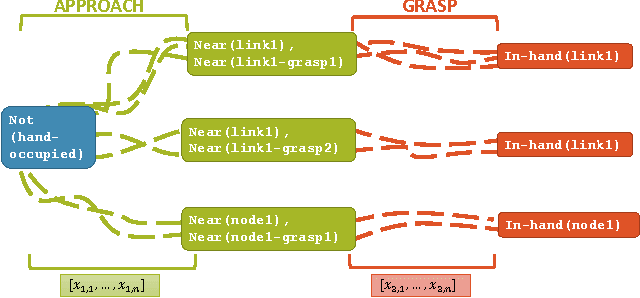
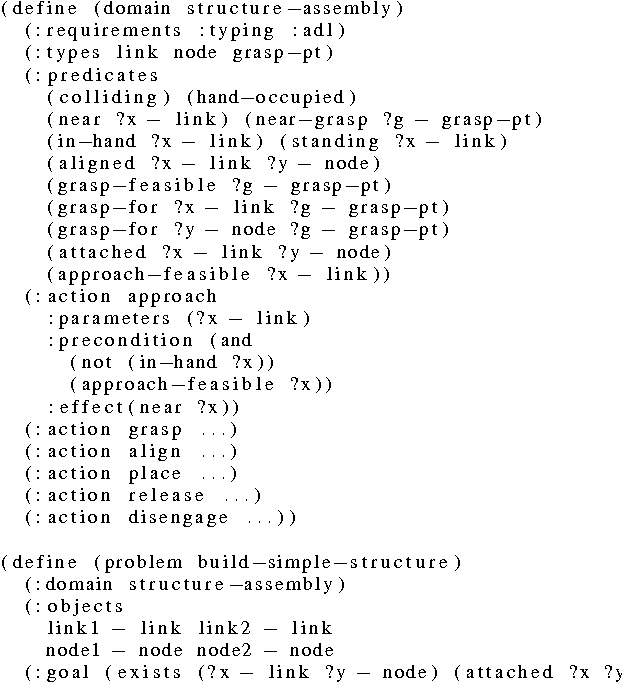
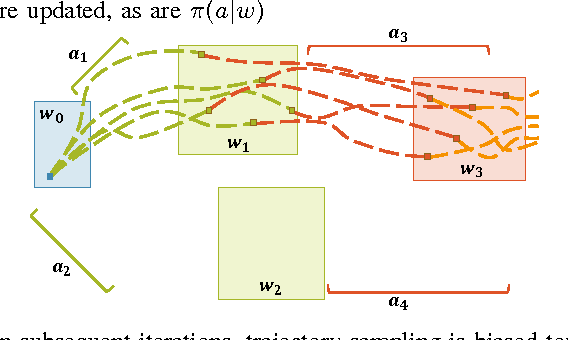
We propose a learning-from-demonstration approach for grounding actions from expert data and an algorithm for using these actions to perform a task in new environments. Our approach is based on an application of sampling-based motion planning to search through the tree of discrete, high-level actions constructed from a symbolic representation of a task. Recursive sampling-based planning is used to explore the space of possible continuous-space instantiations of these actions. We demonstrate the utility of our approach with a magnetic structure assembly task, showing that the robot can intelligently select a sequence of actions in different parts of the workspace and in the presence of obstacles. This approach can better adapt to new environments by selecting the correct high-level actions for the particular environment while taking human preferences into account.