 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTensegrity Robot Proprioceptive State Estimation with Geometric Constraints
Oct 31, 2024



Tensegrity robots, characterized by a synergistic assembly of rigid rods and elastic cables, form robust structures that are resistant to impacts. However, this design introduces complexities in kinematics and dynamics, complicating control and state estimation. This work presents a novel proprioceptive state estimator for tensegrity robots. The estimator initially uses the geometric constraints of 3-bar prism tensegrity structures, combined with IMU and motor encoder measurements, to reconstruct the robot's shape and orientation. It then employs a contact-aided invariant extended Kalman filter with forward kinematics to estimate the global position and orientation of the tensegrity robot. The state estimator's accuracy is assessed against ground truth data in both simulated environments and real-world tensegrity robot applications. It achieves an average drift percentage of 4.2%, comparable to the state estimation performance of traditional rigid robots. This state estimator advances the state of the art in tensegrity robot state estimation and has the potential to run in real-time using onboard sensors, paving the way for full autonomy of tensegrity robots in unstructured environments.
Design of a Variable Stiffness Quasi-Direct Drive Cable-Actuated Tensegrity Robot
Sep 09, 2024Tensegrity robots excel in tasks requiring extreme levels of deformability and robustness. However, there are challenges in state estimation and payload versatility due to their high number of degrees of freedom and unconventional shape. This paper introduces a modular three-bar tensegrity robot featuring a customizable payload design. Our tensegrity robot employs a novel Quasi-Direct Drive (QDD) cable actuator paired with low-stretch polymer cables to achieve accurate proprioception without the need for external force or torque sensors. The design allows for on-the-fly stiffness tuning for better environment and payload adaptability. In this paper, we present the design, fabrication, assembly, and experimental results of the robot. Experimental data demonstrates the high accuracy cable length estimation (<1% error relative to bar length) and variable stiffness control of the cable actuator up to 7 times the minimum stiffness for self support. The presented tensegrity robot serves as a platform for future advancements in autonomous operation and open-source module design.
Omni-Roach: A legged robot capable of traversing multiple types of large obstacles and self-righting
Dec 15, 2021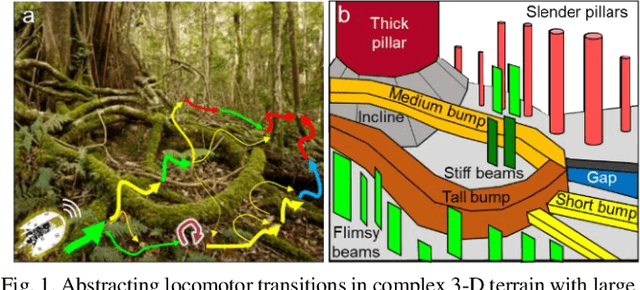
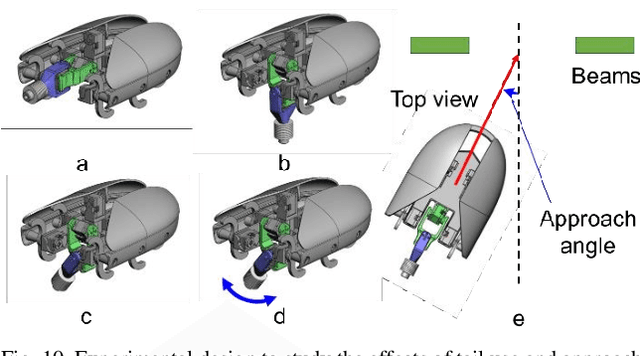
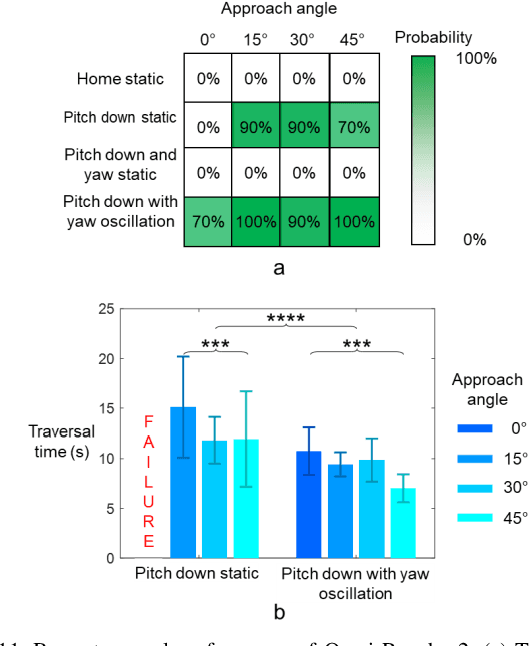
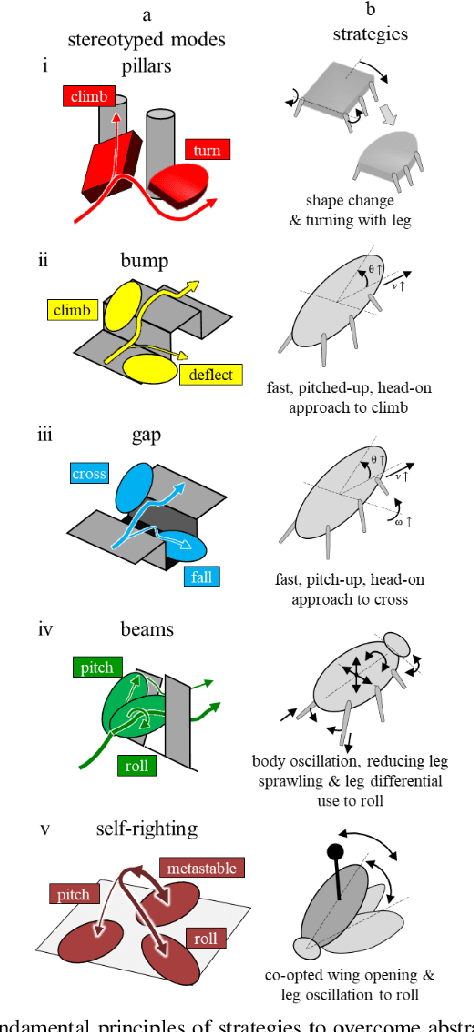
Robots excel at avoiding obstacles but still struggle to traverse complex 3-D terrain with cluttered large obstacles. By contrast, insects like cockroaches excel at doing so. Recent research in our lab elucidated how locomotor transitions emerge from locomotor-environment interaction for diverse locomotor challenges abstracted for complex 3-D terrain and what strategies overcome these challenges. Here, we build on these fundamental insights to develop a cockroach-inspired legged robot, Om-ni-Roach, that integrates these strategies for multi-functional locomotion. The robot is based on the RHex-class design with six compliant legs and features a rounded body shape with two wings that can open, an active tail with pitch and yaw degrees of freedom. Through two development and testing iterations, our robot was capable of overcoming all locomotor challenges with high performance and success rate. It traversed cluttered rigid pillars only 1.1X robot body width apart, a 2.5X hip height bump, a 0.75X body length gap, densely cluttered flexible beams only 65% its body width apart, and self-righted within 4 seconds. Systematic experiments on tail use and approach angle for beam traversal revealed that an active tail pointed downward and tapping against the ground helps roll the body into the gap and break frictional and interlocking contact to traverse.