 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOmni-Roach: A legged robot capable of traversing multiple types of large obstacles and self-righting
Paper and Code
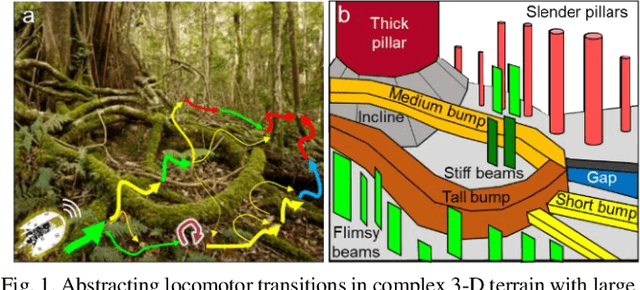
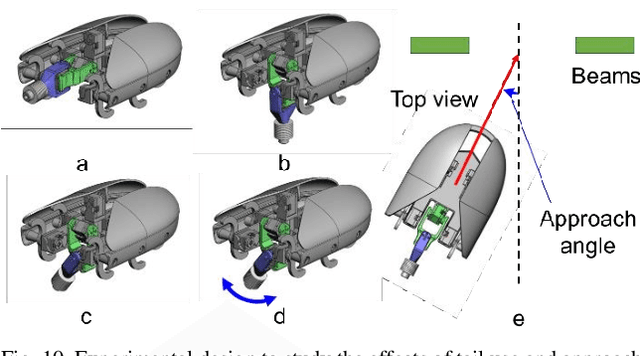
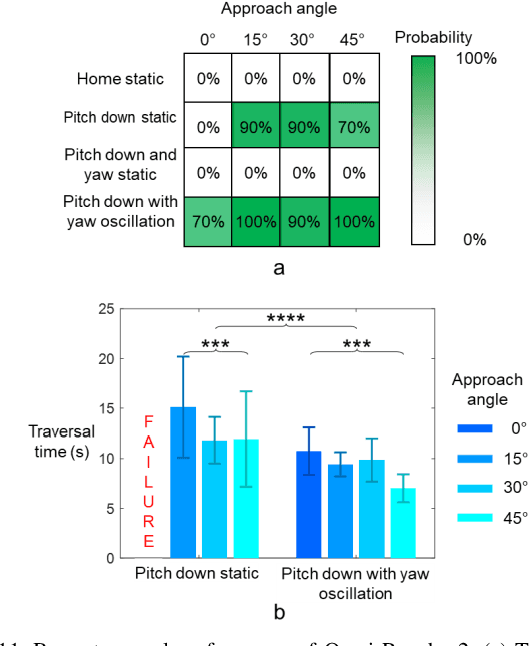
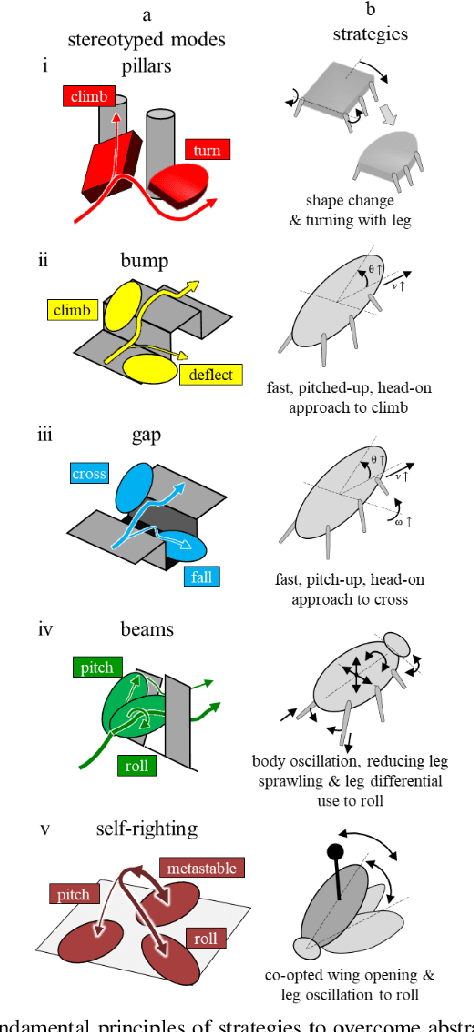
Robots excel at avoiding obstacles but still struggle to traverse complex 3-D terrain with cluttered large obstacles. By contrast, insects like cockroaches excel at doing so. Recent research in our lab elucidated how locomotor transitions emerge from locomotor-environment interaction for diverse locomotor challenges abstracted for complex 3-D terrain and what strategies overcome these challenges. Here, we build on these fundamental insights to develop a cockroach-inspired legged robot, Om-ni-Roach, that integrates these strategies for multi-functional locomotion. The robot is based on the RHex-class design with six compliant legs and features a rounded body shape with two wings that can open, an active tail with pitch and yaw degrees of freedom. Through two development and testing iterations, our robot was capable of overcoming all locomotor challenges with high performance and success rate. It traversed cluttered rigid pillars only 1.1X robot body width apart, a 2.5X hip height bump, a 0.75X body length gap, densely cluttered flexible beams only 65% its body width apart, and self-righted within 4 seconds. Systematic experiments on tail use and approach angle for beam traversal revealed that an active tail pointed downward and tapping against the ground helps roll the body into the gap and break frictional and interlocking contact to traverse.