 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Guide Dog: Leading a Human with Leash-Guided Hybrid Physical Interaction
Paper and Code
Mar 26, 2021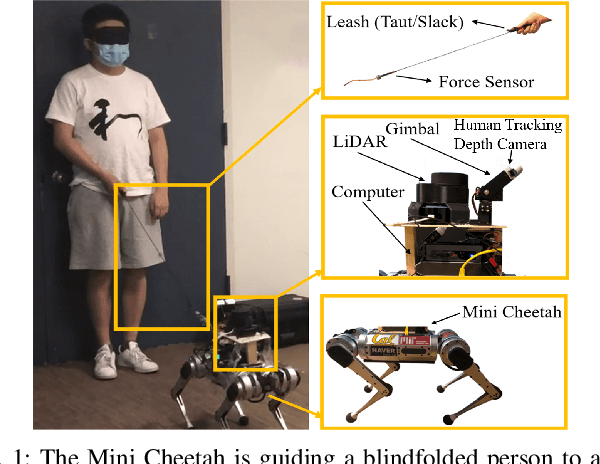
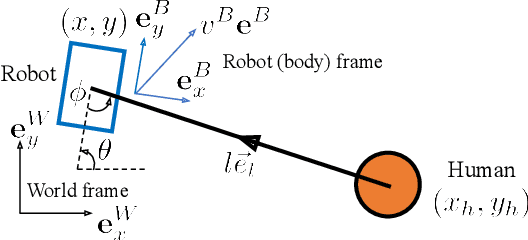
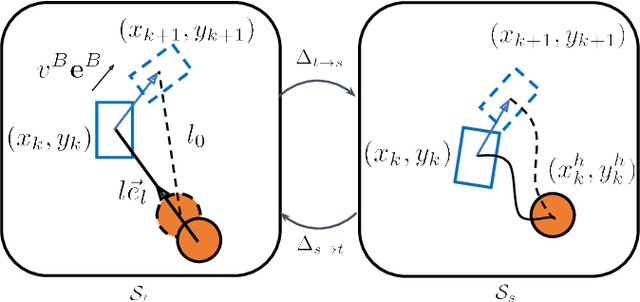
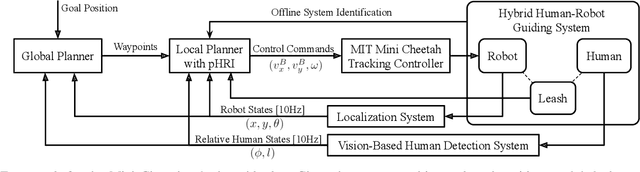
An autonomous robot that is able to physically guide humans through narrow and cluttered spaces could be a big boon to the visually-impaired. Most prior robotic guiding systems are based on wheeled platforms with large bases with actuated rigid guiding canes. The large bases and the actuated arms limit these prior approaches from operating in narrow and cluttered environments. We propose a method that introduces a quadrupedal robot with a leash to enable the robot-guiding human system to change its intrinsic dimension (by letting the leash go slack) in order to fit into narrow spaces. We propose a hybrid physical Human-Robot Interaction model that involves leash tension to describe the dynamical relationship in the robot-guiding human system. This hybrid model is utilized in a mixed-integer programming problem to develop a reactive planner that is able to utilize slack-taut switching to guide a blind-folded person to safely travel in a confined space. The proposed leash-guided robot framework is deployed on a Mini Cheetah quadrupedal robot and validated in experiments.