 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Planning for Multi-stage Forceful Manipulation
Jul 30, 2022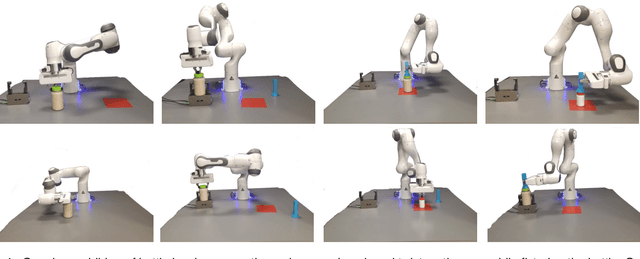
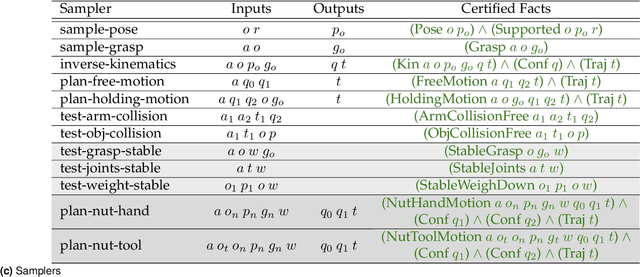
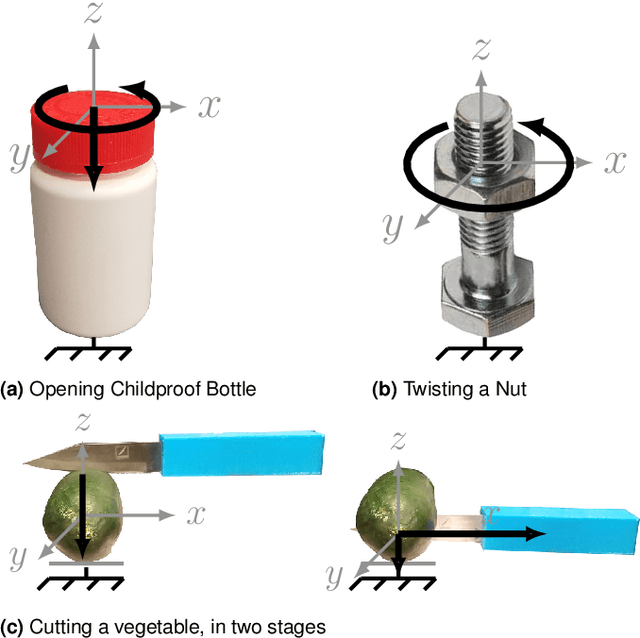

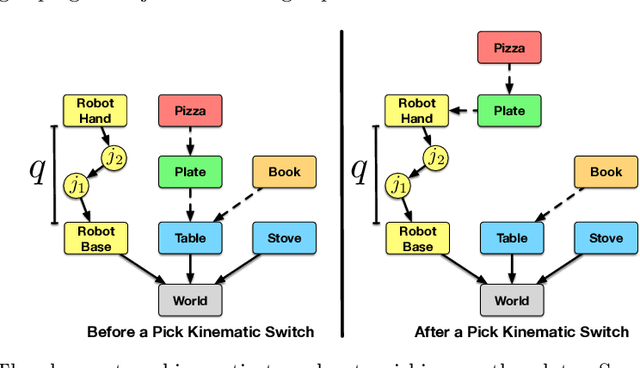
Multi-step forceful manipulation tasks, such as opening a push-and-twist childproof bottle, require a robot to make various planning choices that are substantially impacted by the requirement to exert force during the task. The robot must reason over discrete and continuous choices relating to the sequence of actions, such as whether to pick up an object, and the parameters of each of those actions, such how to grasp the object. To enable planning and executing forceful manipulation, we augment an existing task and motion planner with constraints that explicitly consider torque and frictional limits, captured through the proposed forceful kinematic chain constraint. In three domains, opening a childproof bottle, twisting a nut and cutting a vegetable, we demonstrate how the system selects from among a combinatorial set of strategies.We also show how cost-sensitive planning can be used to find strategies and parameters that are robust to uncertainty in the physical parameters.
Planning for Multi-stage Forceful Manipulation
Jan 07, 2021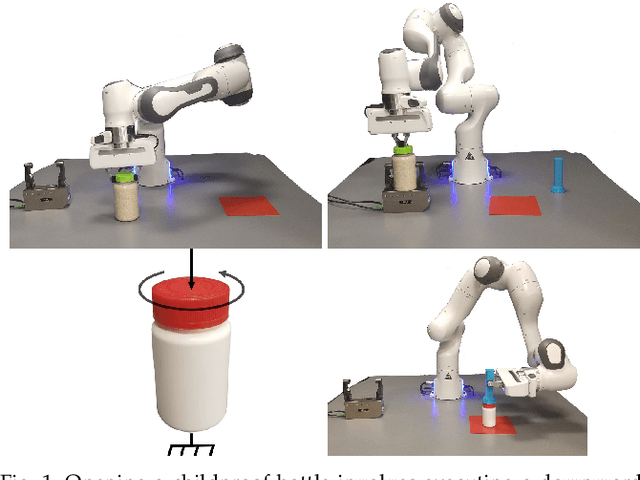
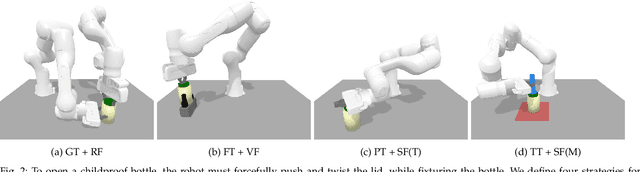
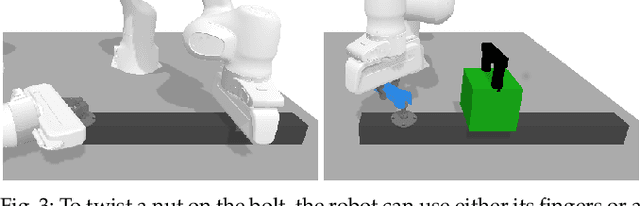

Multi-stage forceful manipulation tasks, such as twisting a nut on a bolt, require reasoning over interlocking constraints over discrete as well as continuous choices. The robot must choose a sequence of discrete actions, or strategy, such as whether to pick up an object, and the continuous parameters of each of those actions, such as how to grasp the object. In forceful manipulation tasks, the force requirements substantially impact the choices of both strategy and parameters. To enable planning and executing forceful manipulation, we augment an existing task and motion planner with controllers that exert wrenches and constraints that explicitly consider torque and frictional limits. In two domains, opening a childproof bottle and twisting a nut, we demonstrate how the system considers a combinatorial number of strategies and how choosing actions that are robust to parameter variations impacts the choice of strategy.
Integrated Task and Motion Planning
Oct 02, 2020
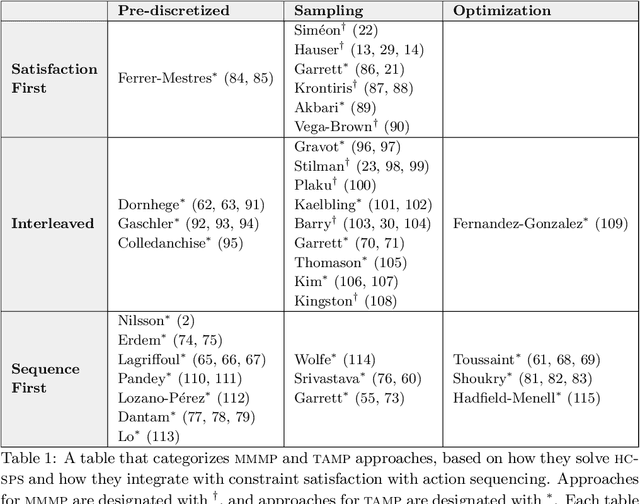
The problem of planning for a robot that operates in environments containing a large number of objects, taking actions to move itself through the world as well as to change the state of the objects, is known as task and motion planning (TAMP). TAMP problems contain elements of discrete task planning, discrete-continuous mathematical programming, and continuous motion planning, and thus cannot be effectively addressed by any of these fields directly. In this paper, we define a class of TAMP problems and survey algorithms for solving them, characterizing the solution methods in terms of their strategies for solving the continuous-space subproblems and their techniques for integrating the discrete and continuous components of the search.
In-Hand Manipulation via Motion Cones
Feb 23, 2019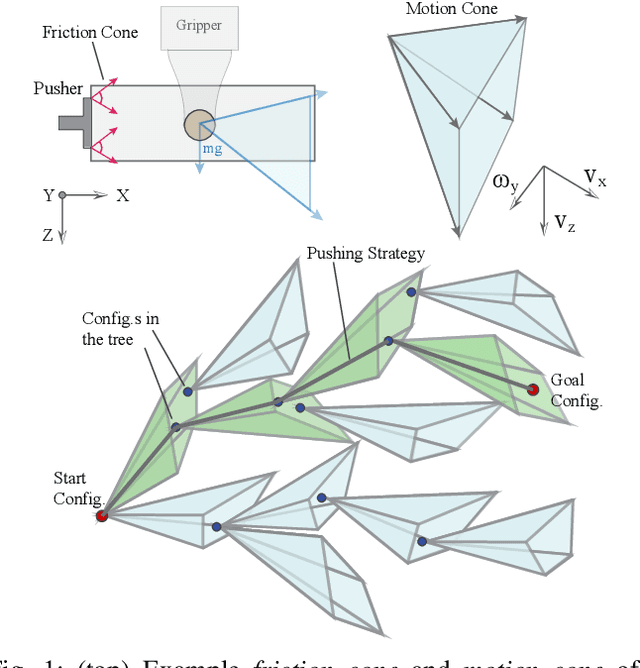
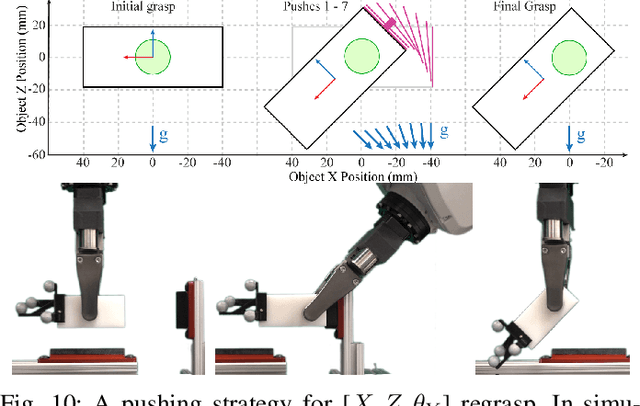
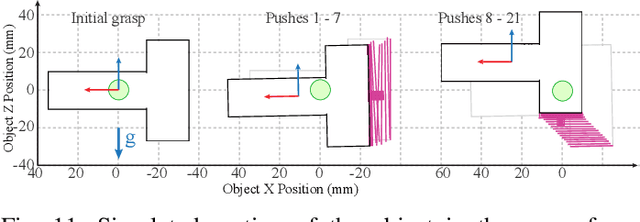

In this paper, we present the mechanics and algorithms to compute the set of feasible motions of an object pushed in a plane. This set is known as the motion cone and was previously described for non-prehensile manipulation tasks in the horizontal plane. We generalize its geometric construction to a broader set of planar tasks, where external forces such as gravity influence the dynamics of pushing, and prehensile tasks, where there are complex interactions between the gripper, object, and pusher. We show that the motion cone is defined by a set of low-curvature surfaces and provide a polyhedral cone approximation to it. We verify its validity with 2000 pushing experiments recorded with motion tracking system. Motion cones abstract the algebra involved in simulating frictional pushing by providing bounds on the set of feasible motions and by characterizing which pushes will stick or slip. We demonstrate their use for the dynamic propagation step in a sampling-based planning algorithm for in-hand manipulation. The planner generates trajectories that involve sequences of continuous pushes with 5-1000x speed improvements to equivalent algorithms. Video Summary -- https://youtu.be/tVDO8QMuYhc
Minimizing Task Space Frechet Error via Efficient Incremental Graph Search
Sep 10, 2018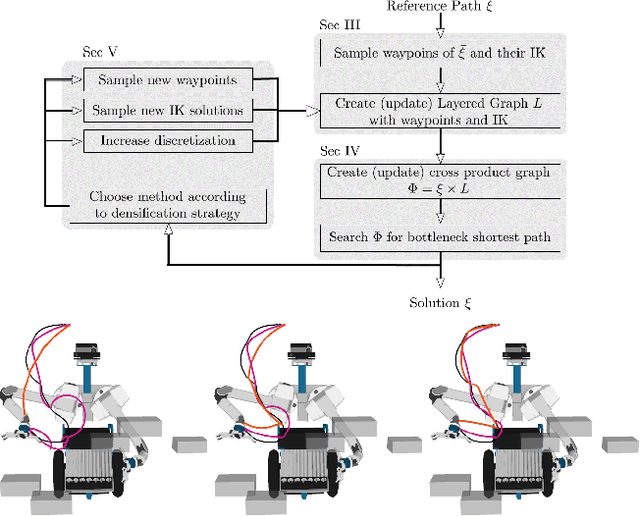

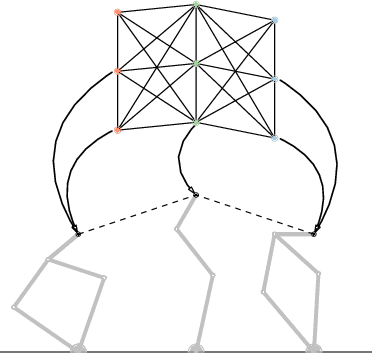
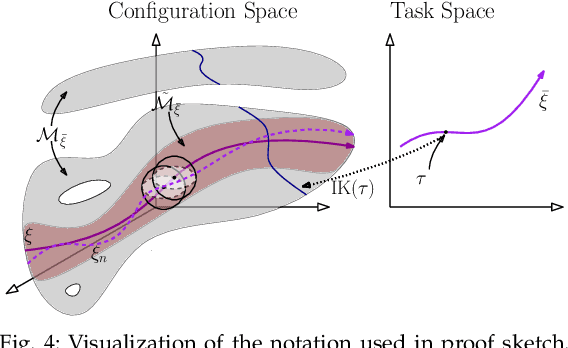
We present an anytime algorithm that generates a collision-free configuration-space path that closely follows a desired path in task space, according to the discrete Frechet distance. By leveraging tools from computational geometry, we approximate the search space using a cross-product graph. We use a variant of Dijkstra's graph-search algorithm to efficiently search for and iteratively improve the solution. We compare multiple proposed densification strategies and empirically show that our algorithm outperforms a set of state-of-the-art planners on a range of manipulation problems. Finally, we offer a proof sketch of the asymptotic optimality of our algorithm.
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Apr 01, 2018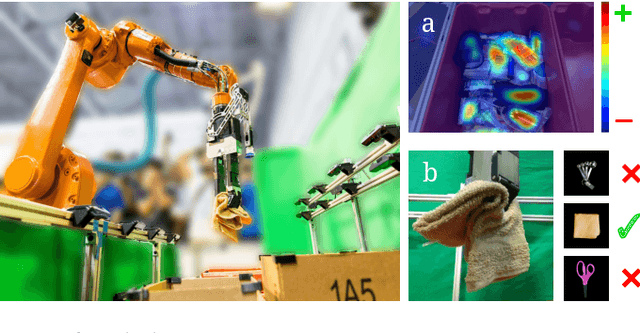
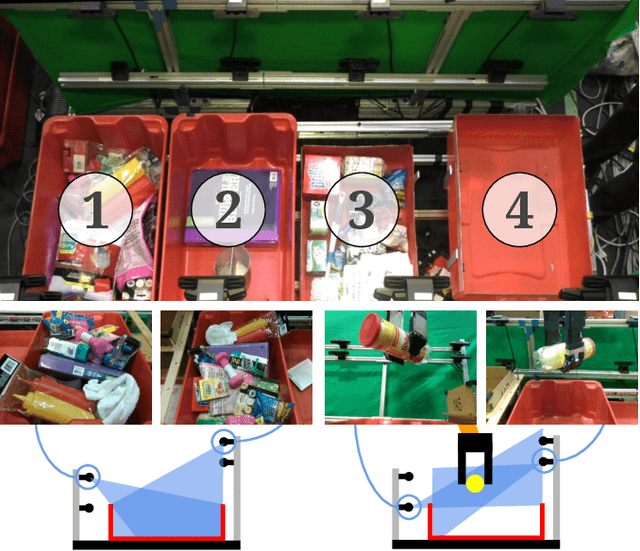
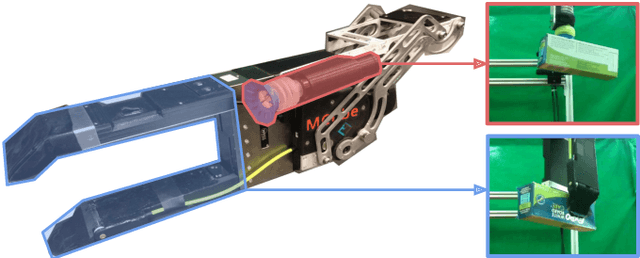
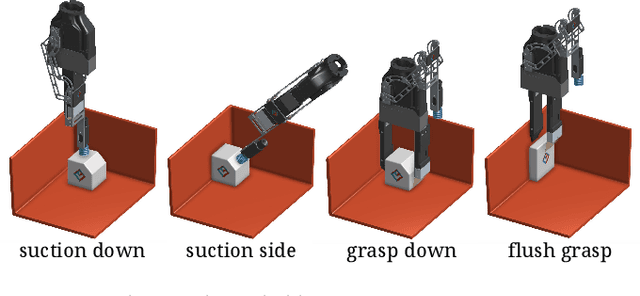
This paper presents a robotic pick-and-place system that is capable of grasping and recognizing both known and novel objects in cluttered environments. The key new feature of the system is that it handles a wide range of object categories without needing any task-specific training data for novel objects. To achieve this, it first uses a category-agnostic affordance prediction algorithm to select and execute among four different grasping primitive behaviors. It then recognizes picked objects with a cross-domain image classification framework that matches observed images to product images. Since product images are readily available for a wide range of objects (e.g., from the web), the system works out-of-the-box for novel objects without requiring any additional training data. Exhaustive experimental results demonstrate that our multi-affordance grasping achieves high success rates for a wide variety of objects in clutter, and our recognition algorithm achieves high accuracy for both known and novel grasped objects. The approach was part of the MIT-Princeton Team system that took 1st place in the stowing task at the 2017 Amazon Robotics Challenge. All code, datasets, and pre-trained models are available online at http://arc.cs.princeton.edu