Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMinimizing Task Space Frechet Error via Efficient Incremental Graph Search
Paper and Code
Sep 10, 2018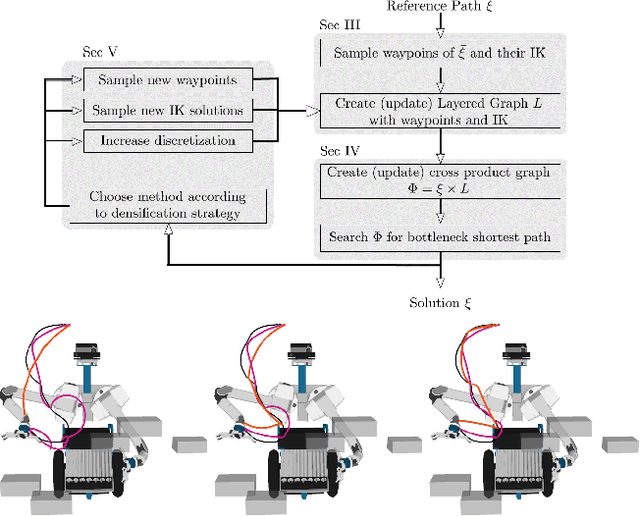

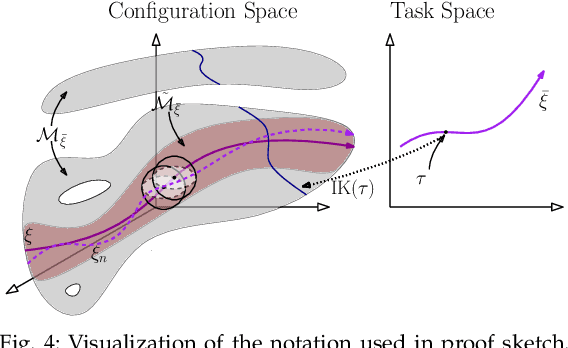
We present an anytime algorithm that generates a collision-free configuration-space path that closely follows a desired path in task space, according to the discrete Frechet distance. By leveraging tools from computational geometry, we approximate the search space using a cross-product graph. We use a variant of Dijkstra's graph-search algorithm to efficiently search for and iteratively improve the solution. We compare multiple proposed densification strategies and empirically show that our algorithm outperforms a set of state-of-the-art planners on a range of manipulation problems. Finally, we offer a proof sketch of the asymptotic optimality of our algorithm.
View paper on