 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
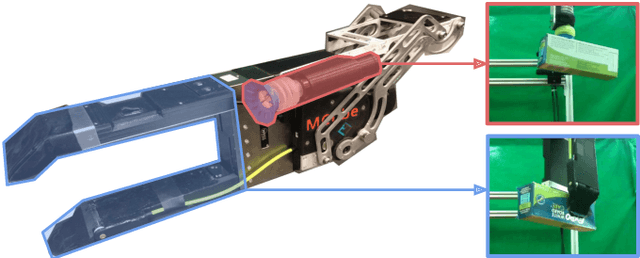
Add to EdgeGelSlim: A High-Resolution, Compact, Robust, and Calibrated Tactile-sensing Finger
May 15, 2018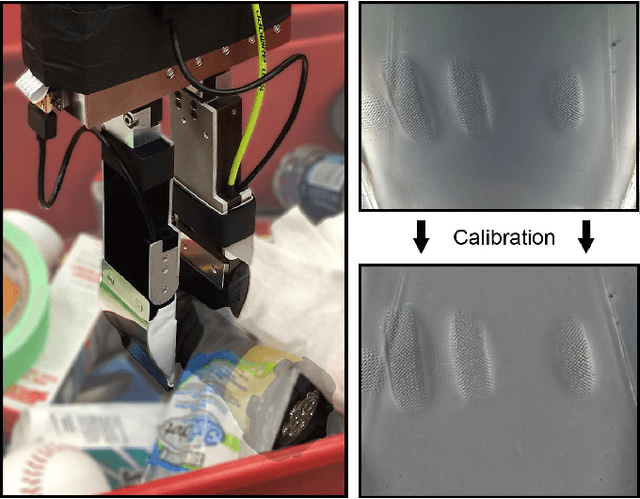
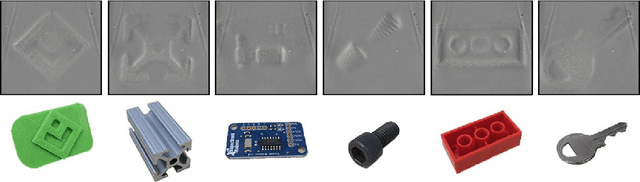
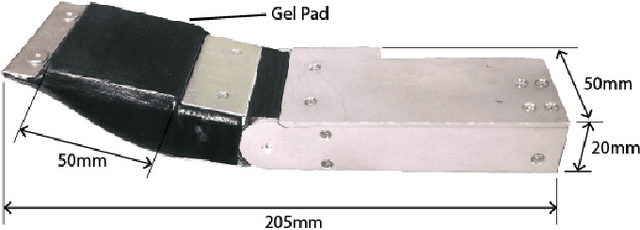
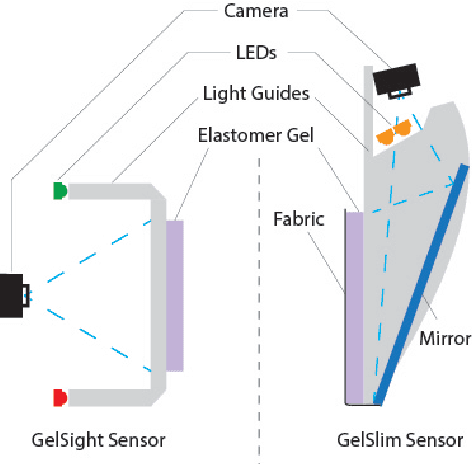
This work describes the development of a high-resolution tactile-sensing finger for robot grasping. This finger, inspired by previous GelSight sensing techniques, features an integration that is slimmer, more robust, and with more homogeneous output than previous vision-based tactile sensors. To achieve a compact integration, we redesign the optical path from illumination source to camera by combining light guides and an arrangement of mirror reflections. We parameterize the optical path with geometric design variables and describe the tradeoffs between the finger thickness, the depth of field of the camera, and the size of the tactile sensing area. The sensor sustains the wear from continuous use -- and abuse -- in grasping tasks by combining tougher materials for the compliant soft gel, a textured fabric skin, a structurally rigid body, and a calibration process that maintains homogeneous illumination and contrast of the tactile images during use. Finally, we evaluate the sensor's durability along four metrics that track the signal quality during more than 3000 grasping experiments.
Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
Apr 01, 2018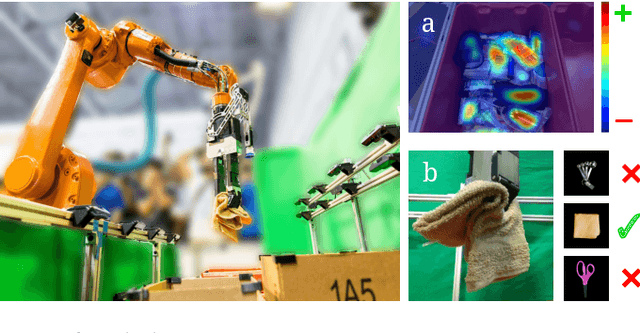
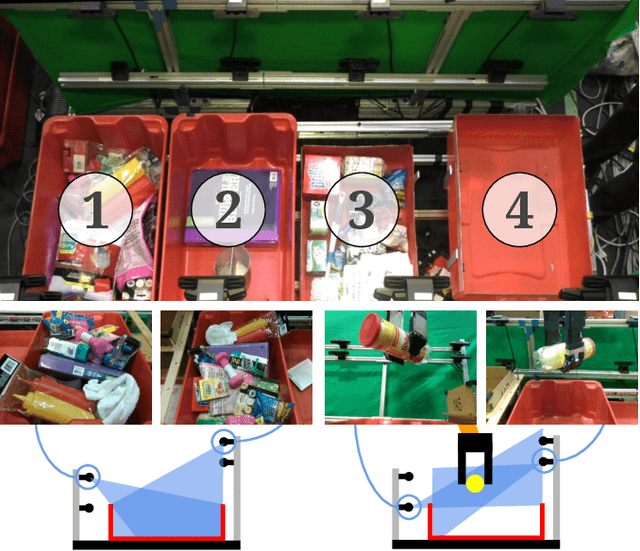
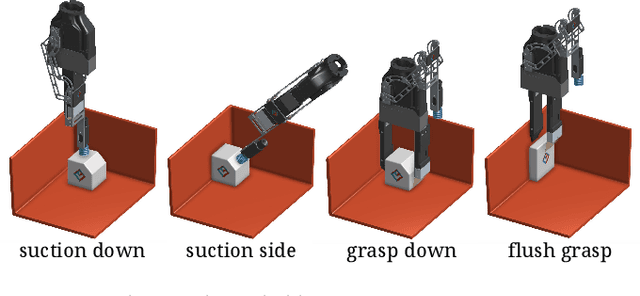
This paper presents a robotic pick-and-place system that is capable of grasping and recognizing both known and novel objects in cluttered environments. The key new feature of the system is that it handles a wide range of object categories without needing any task-specific training data for novel objects. To achieve this, it first uses a category-agnostic affordance prediction algorithm to select and execute among four different grasping primitive behaviors. It then recognizes picked objects with a cross-domain image classification framework that matches observed images to product images. Since product images are readily available for a wide range of objects (e.g., from the web), the system works out-of-the-box for novel objects without requiring any additional training data. Exhaustive experimental results demonstrate that our multi-affordance grasping achieves high success rates for a wide variety of objects in clutter, and our recognition algorithm achieves high accuracy for both known and novel grasped objects. The approach was part of the MIT-Princeton Team system that took 1st place in the stowing task at the 2017 Amazon Robotics Challenge. All code, datasets, and pre-trained models are available online at http://arc.cs.princeton.edu