Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntegrated Task and Motion Planning
Paper and Code
Oct 02, 2020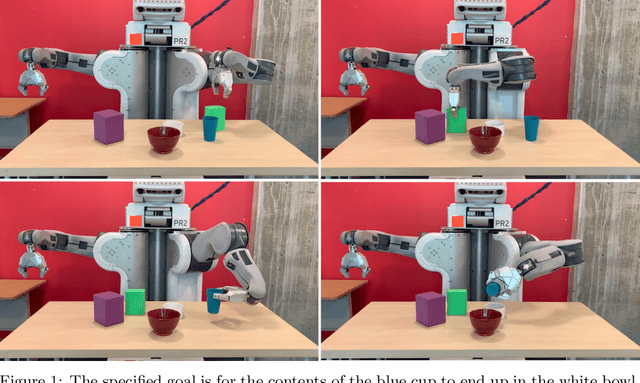
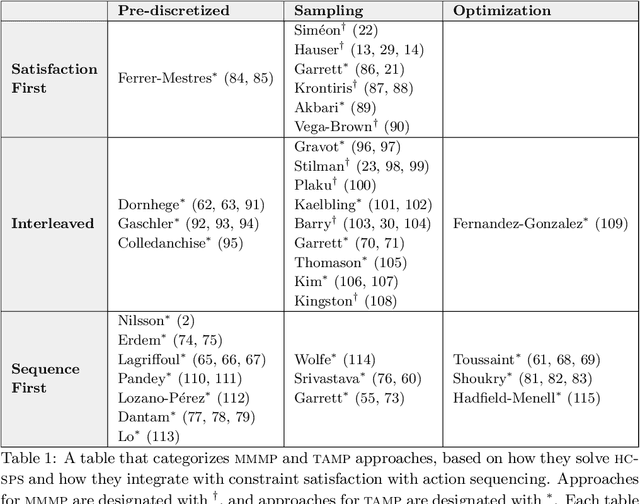
The problem of planning for a robot that operates in environments containing a large number of objects, taking actions to move itself through the world as well as to change the state of the objects, is known as task and motion planning (TAMP). TAMP problems contain elements of discrete task planning, discrete-continuous mathematical programming, and continuous motion planning, and thus cannot be effectively addressed by any of these fields directly. In this paper, we define a class of TAMP problems and survey algorithms for solving them, characterizing the solution methods in terms of their strategies for solving the continuous-space subproblems and their techniques for integrating the discrete and continuous components of the search.
* Accepted to the Annual Review of Control, Robotics, and Autonomous
Systems. Vol. 4 (Volume publication date May 2021)
View paper on