 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeT2I-Based Physical-World Appearance Attack against Traffic Sign Recognition Systems in Autonomous Driving
Nov 17, 2025Traffic Sign Recognition (TSR) systems play a critical role in Autonomous Driving (AD) systems, enabling real-time detection of road signs, such as STOP and speed limit signs. While these systems are increasingly integrated into commercial vehicles, recent research has exposed their vulnerability to physical-world adversarial appearance attacks. In such attacks, carefully crafted visual patterns are misinterpreted by TSR models as legitimate traffic signs, while remaining inconspicuous or benign to human observers. However, existing adversarial appearance attacks suffer from notable limitations. Pixel-level perturbation-based methods often lack stealthiness and tend to overfit to specific surrogate models, resulting in poor transferability to real-world TSR systems. On the other hand, text-to-image (T2I) diffusion model-based approaches demonstrate limited effectiveness and poor generalization to out-of-distribution sign types. In this paper, we present DiffSign, a novel T2I-based appearance attack framework designed to generate physically robust, highly effective, transferable, practical, and stealthy appearance attacks against TSR systems. To overcome the limitations of prior approaches, we propose a carefully designed attack pipeline that integrates CLIP-based loss and masked prompts to improve attack focus and controllability. We also propose two novel style customization methods to guide visual appearance and improve out-of-domain traffic sign attack generalization and attack stealthiness. We conduct extensive evaluations of DiffSign under varied real-world conditions, including different distances, angles, light conditions, and sign categories. Our method achieves an average physical-world attack success rate of 83.3%, leveraging DiffSign's high effectiveness in attack transferability.
Revisiting Physical-World Adversarial Attack on Traffic Sign Recognition: A Commercial Systems Perspective
Sep 15, 2024Traffic Sign Recognition (TSR) is crucial for safe and correct driving automation. Recent works revealed a general vulnerability of TSR models to physical-world adversarial attacks, which can be low-cost, highly deployable, and capable of causing severe attack effects such as hiding a critical traffic sign or spoofing a fake one. However, so far existing works generally only considered evaluating the attack effects on academic TSR models, leaving the impacts of such attacks on real-world commercial TSR systems largely unclear. In this paper, we conduct the first large-scale measurement of physical-world adversarial attacks against commercial TSR systems. Our testing results reveal that it is possible for existing attack works from academia to have highly reliable (100\%) attack success against certain commercial TSR system functionality, but such attack capabilities are not generalizable, leading to much lower-than-expected attack success rates overall. We find that one potential major factor is a spatial memorization design that commonly exists in today's commercial TSR systems. We design new attack success metrics that can mathematically model the impacts of such design on the TSR system-level attack success, and use them to revisit existing attacks. Through these efforts, we uncover 7 novel observations, some of which directly challenge the observations or claims in prior works due to the introduction of the new metrics.
SlowPerception: Physical-World Latency Attack against Visual Perception in Autonomous Driving
Jun 09, 2024Autonomous Driving (AD) systems critically depend on visual perception for real-time object detection and multiple object tracking (MOT) to ensure safe driving. However, high latency in these visual perception components can lead to significant safety risks, such as vehicle collisions. While previous research has extensively explored latency attacks within the digital realm, translating these methods effectively to the physical world presents challenges. For instance, existing attacks rely on perturbations that are unrealistic or impractical for AD, such as adversarial perturbations affecting areas like the sky, or requiring large patches that obscure most of a camera's view, thus making them impossible to be conducted effectively in the real world. In this paper, we introduce SlowPerception, the first physical-world latency attack against AD perception, via generating projector-based universal perturbations. SlowPerception strategically creates numerous phantom objects on various surfaces in the environment, significantly increasing the computational load of Non-Maximum Suppression (NMS) and MOT, thereby inducing substantial latency. Our SlowPerception achieves second-level latency in physical-world settings, with an average latency of 2.5 seconds across different AD perception systems, scenarios, and hardware configurations. This performance significantly outperforms existing state-of-the-art latency attacks. Additionally, we conduct AD system-level impact assessments, such as vehicle collisions, using industry-grade AD systems with production-grade AD simulators with a 97% average rate. We hope that our analyses can inspire further research in this critical domain, enhancing the robustness of AD systems against emerging vulnerabilities.
ControlLoc: Physical-World Hijacking Attack on Visual Perception in Autonomous Driving
Jun 09, 2024



Recent research in adversarial machine learning has focused on visual perception in Autonomous Driving (AD) and has shown that printed adversarial patches can attack object detectors. However, it is important to note that AD visual perception encompasses more than just object detection; it also includes Multiple Object Tracking (MOT). MOT enhances the robustness by compensating for object detection errors and requiring consistent object detection results across multiple frames before influencing tracking results and driving decisions. Thus, MOT makes attacks on object detection alone less effective. To attack such robust AD visual perception, a digital hijacking attack has been proposed to cause dangerous driving scenarios. However, this attack has limited effectiveness. In this paper, we introduce a novel physical-world adversarial patch attack, ControlLoc, designed to exploit hijacking vulnerabilities in entire AD visual perception. ControlLoc utilizes a two-stage process: initially identifying the optimal location for the adversarial patch, and subsequently generating the patch that can modify the perceived location and shape of objects with the optimal location. Extensive evaluations demonstrate the superior performance of ControlLoc, achieving an impressive average attack success rate of around 98.1% across various AD visual perceptions and datasets, which is four times greater effectiveness than the existing hijacking attack. The effectiveness of ControlLoc is further validated in physical-world conditions, including real vehicle tests under different conditions such as outdoor light conditions with an average attack success rate of 77.5%. AD system-level impact assessments are also included, such as vehicle collision, using industry-grade AD systems and production-grade AD simulators with an average vehicle collision rate and unnecessary emergency stop rate of 81.3%.
Towards Robustness Analysis of E-Commerce Ranking System
Mar 07, 2024


Information retrieval (IR) is a pivotal component in various applications. Recent advances in machine learning (ML) have enabled the integration of ML algorithms into IR, particularly in ranking systems. While there is a plethora of research on the robustness of ML-based ranking systems, these studies largely neglect commercial e-commerce systems and fail to establish a connection between real-world and manipulated query relevance. In this paper, we present the first systematic measurement study on the robustness of e-commerce ranking systems. We define robustness as the consistency of ranking outcomes for semantically identical queries. To quantitatively analyze robustness, we propose a novel metric that considers both ranking position and item-specific information that are absent in existing metrics. Our large-scale measurement study with real-world data from e-commerce retailers reveals an open opportunity to measure and improve robustness since semantically identical queries often yield inconsistent ranking results. Based on our observations, we propose several solution directions to enhance robustness, such as the use of Large Language Models. Note that the issue of robustness discussed herein does not constitute an error or oversight. Rather, in scenarios where there exists a vast array of choices, it is feasible to present a multitude of products in various permutations, all of which could be equally appealing. However, this extensive selection may lead to customer confusion. As e-commerce retailers use various techniques to improve the quality of search results, we hope that this research offers valuable guidance for measuring the robustness of the ranking systems.
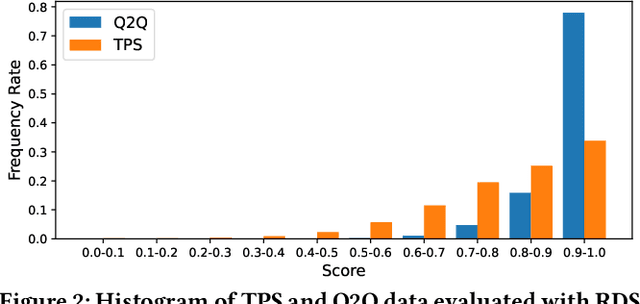
SlowTrack: Increasing the Latency of Camera-based Perception in Autonomous Driving Using Adversarial Examples
Dec 26, 2023


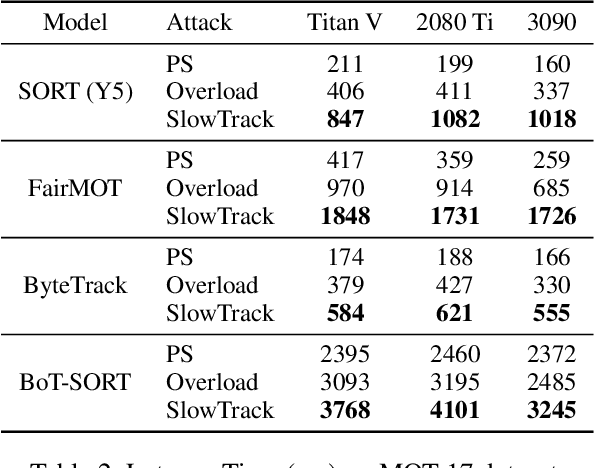
In Autonomous Driving (AD), real-time perception is a critical component responsible for detecting surrounding objects to ensure safe driving. While researchers have extensively explored the integrity of AD perception due to its safety and security implications, the aspect of availability (real-time performance) or latency has received limited attention. Existing works on latency-based attack have focused mainly on object detection, i.e., a component in camera-based AD perception, overlooking the entire camera-based AD perception, which hinders them to achieve effective system-level effects, such as vehicle crashes. In this paper, we propose SlowTrack, a novel framework for generating adversarial attacks to increase the execution time of camera-based AD perception. We propose a novel two-stage attack strategy along with the three new loss function designs. Our evaluation is conducted on four popular camera-based AD perception pipelines, and the results demonstrate that SlowTrack significantly outperforms existing latency-based attacks while maintaining comparable imperceptibility levels. Furthermore, we perform the evaluation on Baidu Apollo, an industry-grade full-stack AD system, and LGSVL, a production-grade AD simulator, with two scenarios to compare the system-level effects of SlowTrack and existing attacks. Our evaluation results show that the system-level effects can be significantly improved, i.e., the vehicle crash rate of SlowTrack is around 95% on average while existing works only have around 30%.
Intriguing Properties of Diffusion Models: A Large-Scale Dataset for Evaluating Natural Attack Capability in Text-to-Image Generative Models
Aug 30, 2023



Denoising probabilistic diffusion models have shown breakthrough performance that can generate more photo-realistic images or human-level illustrations than the prior models such as GANs. This high image-generation capability has stimulated the creation of many downstream applications in various areas. However, we find that this technology is indeed a double-edged sword: We identify a new type of attack, called the Natural Denoising Diffusion (NDD) attack based on the finding that state-of-the-art deep neural network (DNN) models still hold their prediction even if we intentionally remove their robust features, which are essential to the human visual system (HVS), by text prompts. The NDD attack can generate low-cost, model-agnostic, and transferrable adversarial attacks by exploiting the natural attack capability in diffusion models. Motivated by the finding, we construct a large-scale dataset, Natural Denoising Diffusion Attack (NDDA) dataset, to systematically evaluate the risk of the natural attack capability of diffusion models with state-of-the-art text-to-image diffusion models. We evaluate the natural attack capability by answering 6 research questions. Through a user study to confirm the validity of the NDD attack, we find that the NDD attack can achieve an 88% detection rate while being stealthy to 93% of human subjects. We also find that the non-robust features embedded by diffusion models contribute to the natural attack capability. To confirm the model-agnostic and transferrable attack capability, we perform the NDD attack against an AD vehicle and find that 73% of the physically printed attacks can be detected as a stop sign. We hope that our study and dataset can help our community to be aware of the risk of diffusion models and facilitate further research toward robust DNN models.
Does Physical Adversarial Example Really Matter to Autonomous Driving? Towards System-Level Effect of Adversarial Object Evasion Attack
Aug 23, 2023



In autonomous driving (AD), accurate perception is indispensable to achieving safe and secure driving. Due to its safety-criticality, the security of AD perception has been widely studied. Among different attacks on AD perception, the physical adversarial object evasion attacks are especially severe. However, we find that all existing literature only evaluates their attack effect at the targeted AI component level but not at the system level, i.e., with the entire system semantics and context such as the full AD pipeline. Thereby, this raises a critical research question: can these existing researches effectively achieve system-level attack effects (e.g., traffic rule violations) in the real-world AD context? In this work, we conduct the first measurement study on whether and how effectively the existing designs can lead to system-level effects, especially for the STOP sign-evasion attacks due to their popularity and severity. Our evaluation results show that all the representative prior works cannot achieve any system-level effects. We observe two design limitations in the prior works: 1) physical model-inconsistent object size distribution in pixel sampling and 2) lack of vehicle plant model and AD system model consideration. Then, we propose SysAdv, a novel system-driven attack design in the AD context and our evaluation results show that the system-level effects can be significantly improved, i.e., the violation rate increases by around 70%.
SoK: On the Semantic AI Security in Autonomous Driving
Mar 10, 2022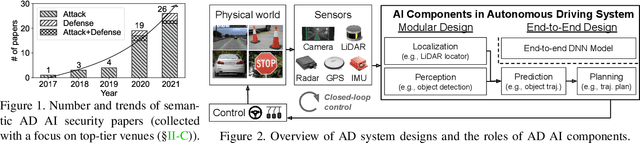
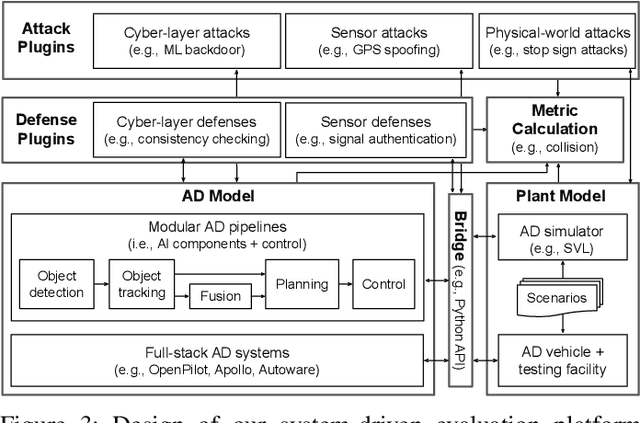
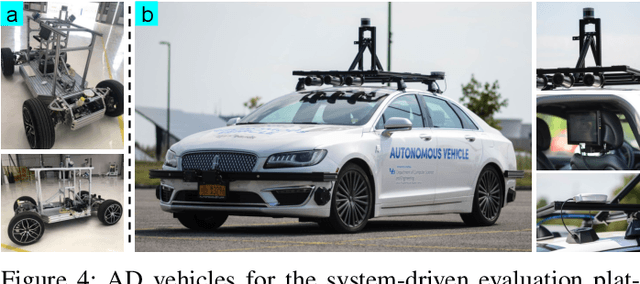

Autonomous Driving (AD) systems rely on AI components to make safety and correct driving decisions. Unfortunately, today's AI algorithms are known to be generally vulnerable to adversarial attacks. However, for such AI component-level vulnerabilities to be semantically impactful at the system level, it needs to address non-trivial semantic gaps both (1) from the system-level attack input spaces to those at AI component level, and (2) from AI component-level attack impacts to those at the system level. In this paper, we define such research space as semantic AI security as opposed to generic AI security. Over the past 5 years, increasingly more research works are performed to tackle such semantic AI security challenges in AD context, which has started to show an exponential growth trend. In this paper, we perform the first systematization of knowledge of such growing semantic AD AI security research space. In total, we collect and analyze 53 such papers, and systematically taxonomize them based on research aspects critical for the security field. We summarize 6 most substantial scientific gaps observed based on quantitative comparisons both vertically among existing AD AI security works and horizontally with security works from closely-related domains. With these, we are able to provide insights and potential future directions not only at the design level, but also at the research goal, methodology, and community levels. To address the most critical scientific methodology-level gap, we take the initiative to develop an open-source, uniform, and extensible system-driven evaluation platform, named PASS, for the semantic AD AI security research community. We also use our implemented platform prototype to showcase the capabilities and benefits of such a platform using representative semantic AD AI attacks.
Hold Tight and Never Let Go: Security of Deep Learning based Automated Lane Centering under Physical-World Attack
Sep 14, 2020

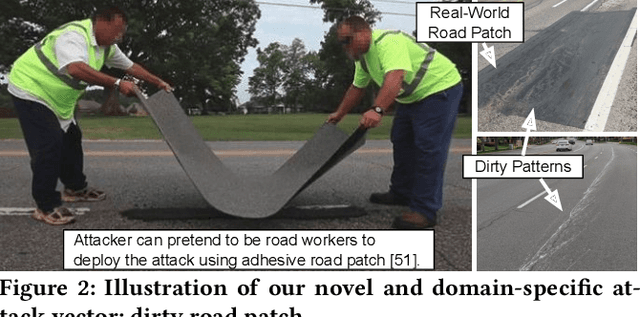
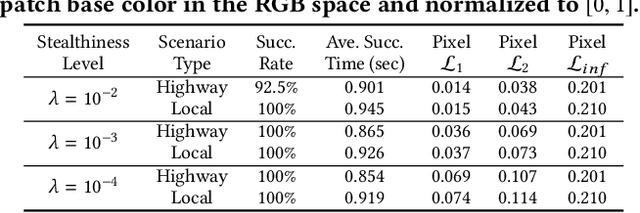
Automated Lane Centering (ALC) systems are convenient and widely deployed today, but also highly security and safety critical. In this work, we are the first to systematically study the security of state-of-the-art deep learning based ALC systems in their designed operational domains under physical-world adversarial attacks. We formulate the problem with a safety-critical attack goal, and a novel and domain-specific attack vector: dirty road patches. To systematically generate the attack, we adopt an optimization-based approach and overcome domain-specific design challenges such as camera frame inter-dependencies due to dynamic vehicle actuation, and the lack of objective function design for lane detection models. We evaluate our attack method on a production ALC system using 80 attack scenarios from real-world driving traces. The results show that our attack is highly effective with over 92% success rates and less than 0.95 sec average success time, which is substantially lower than the average driver reaction time. Such high attack effectiveness is also found (1) robust to motion model inaccuracies, different lane detection model designs, and physical-world factors, and (2) stealthy from the driver's view. To concretely understand the end-to-end safety consequences, we further evaluate on concrete real-world attack scenarios using a production-grade simulator, and find that our attack can successfully cause the victim to hit the highway concrete barrier or a truck in the opposite direction with 98% and 100% success rates. We also discuss defense directions.