 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSoK: On the Semantic AI Security in Autonomous Driving
Mar 10, 2022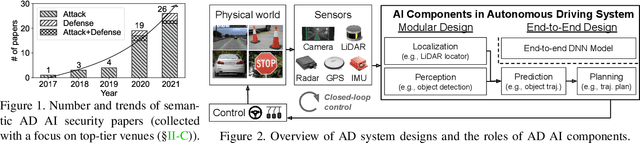
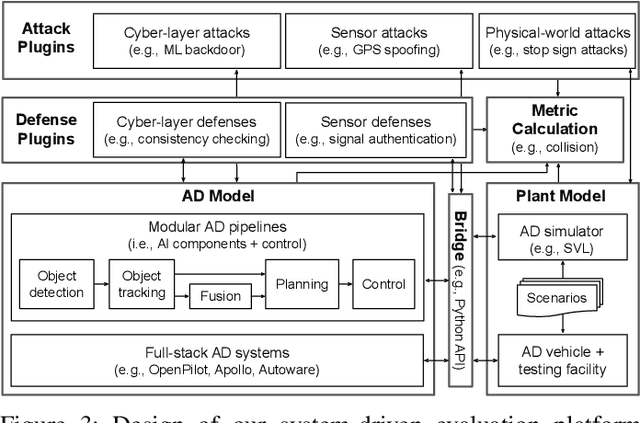
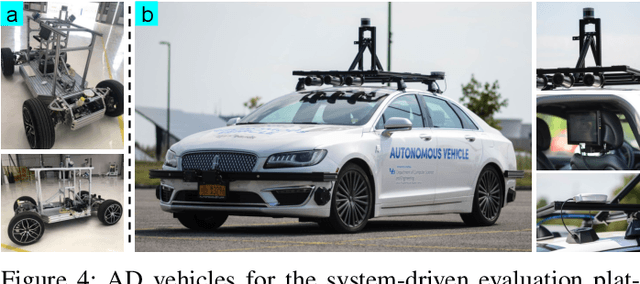

Autonomous Driving (AD) systems rely on AI components to make safety and correct driving decisions. Unfortunately, today's AI algorithms are known to be generally vulnerable to adversarial attacks. However, for such AI component-level vulnerabilities to be semantically impactful at the system level, it needs to address non-trivial semantic gaps both (1) from the system-level attack input spaces to those at AI component level, and (2) from AI component-level attack impacts to those at the system level. In this paper, we define such research space as semantic AI security as opposed to generic AI security. Over the past 5 years, increasingly more research works are performed to tackle such semantic AI security challenges in AD context, which has started to show an exponential growth trend. In this paper, we perform the first systematization of knowledge of such growing semantic AD AI security research space. In total, we collect and analyze 53 such papers, and systematically taxonomize them based on research aspects critical for the security field. We summarize 6 most substantial scientific gaps observed based on quantitative comparisons both vertically among existing AD AI security works and horizontally with security works from closely-related domains. With these, we are able to provide insights and potential future directions not only at the design level, but also at the research goal, methodology, and community levels. To address the most critical scientific methodology-level gap, we take the initiative to develop an open-source, uniform, and extensible system-driven evaluation platform, named PASS, for the semantic AD AI security research community. We also use our implemented platform prototype to showcase the capabilities and benefits of such a platform using representative semantic AD AI attacks.
Detecting Safety Problems of Multi-Sensor Fusion in Autonomous Driving
Sep 14, 2021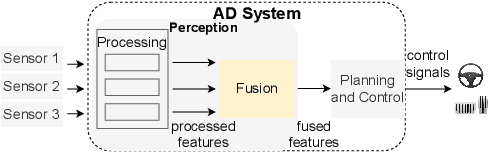

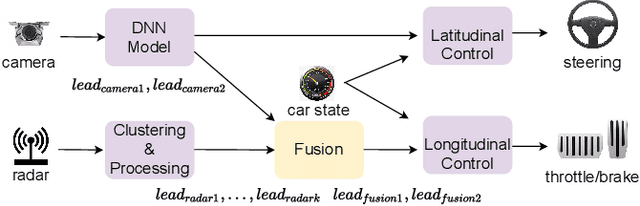
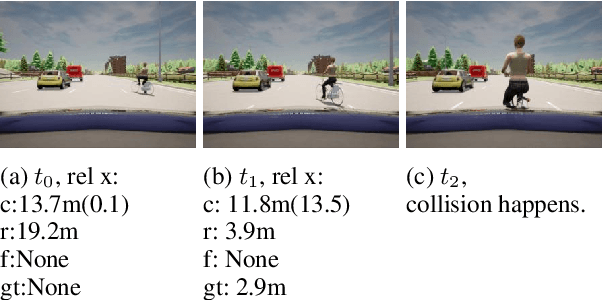
Autonomous driving (AD) systems have been thriving in recent years. In general, they receive sensor data, compute driving decisions, and output control signals to the vehicles. To smooth out the uncertainties brought by sensor inputs, AD systems usually leverage multi-sensor fusion (MSF) to fuse the sensor inputs and produce a more reliable understanding of the surroundings. However, MSF cannot completely eliminate the uncertainties since it lacks the knowledge about which sensor provides the most accurate data. As a result, critical consequences might happen unexpectedly. In this work, we observed that the popular MSF methods in an industry-grade Advanced Driver-Assistance System (ADAS) can mislead the car control and result in serious safety hazards. Misbehavior can happen regardless of the used fusion methods and the accurate data from at least one sensor. To attribute the safety hazards to a MSF method, we formally define the fusion errors and propose a way to distinguish safety violations causally induced by such errors. Further, we develop a novel evolutionary-based domain-specific search framework, FusionFuzz, for the efficient detection of fusion errors. We evaluate our framework on two widely used MSF methods. %in two driving environments. Experimental results show that FusionFuzz identifies more than 150 fusion errors. Finally, we provide several suggestions to improve the MSF methods under study.
Coverage-based Scene Fuzzing for Virtual Autonomous Driving Testing
Jun 02, 2021

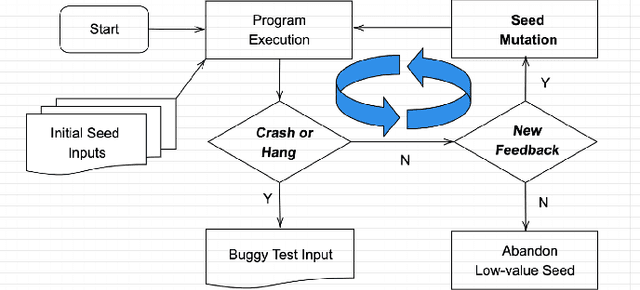
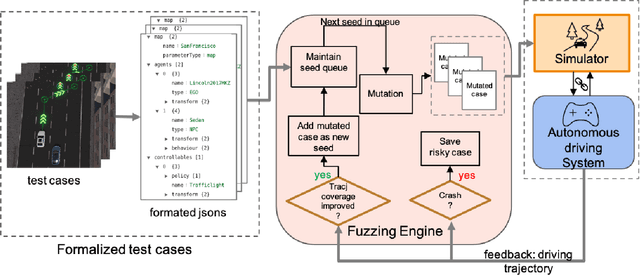
Simulation-based virtual testing has become an essential step to ensure the safety of autonomous driving systems. Testers need to handcraft the virtual driving scenes and configure various environmental settings like surrounding traffic, weather conditions, etc. Due to the huge amount of configuration possibilities, the human efforts are subject to the inefficiency in detecting flaws in industry-class autonomous driving system. This paper proposes a coverage-driven fuzzing technique to automatically generate diverse configuration parameters to form new driving scenes. Experimental results show that our fuzzing method can significantly reduce the cost in deriving new risky scenes from the initial setup designed by testers. We expect automated fuzzing will become a common practice in virtual testing for autonomous driving systems.