Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSecurity of Deep Learning based Lane Keeping System under Physical-World Adversarial Attack
Paper and Code

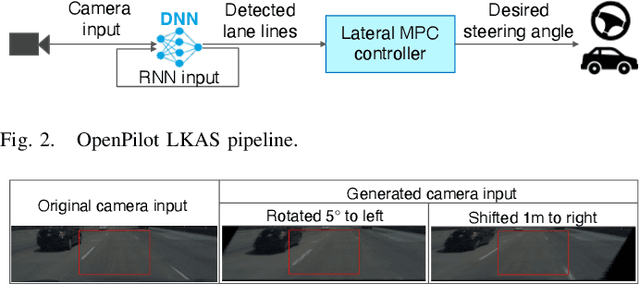
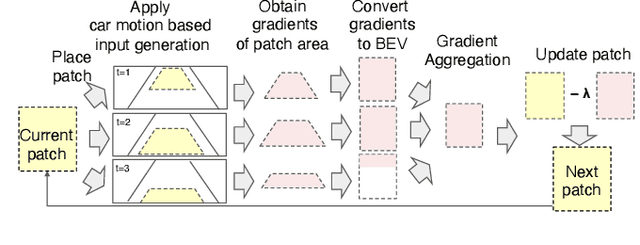
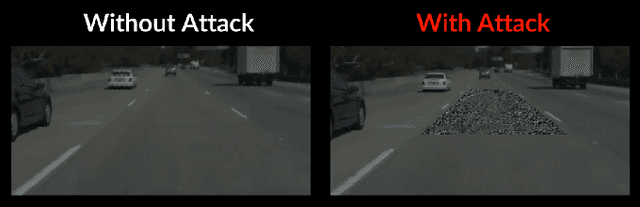
Lane-Keeping Assistance System (LKAS) is convenient and widely available today, but also extremely security and safety critical. In this work, we design and implement the first systematic approach to attack real-world DNN-based LKASes. We identify dirty road patches as a novel and domain-specific threat model for practicality and stealthiness. We formulate the attack as an optimization problem, and address the challenge from the inter-dependencies among attacks on consecutive camera frames. We evaluate our approach on a state-of-the-art LKAS and our preliminary results show that our attack can successfully cause it to drive off lane boundaries within as short as 1.3 seconds.
* Project page: https://sites.google.com/view/lane-keeping-adv-attack/
View paper on