 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHold Tight and Never Let Go: Security of Deep Learning based Automated Lane Centering under Physical-World Attack
Paper and Code


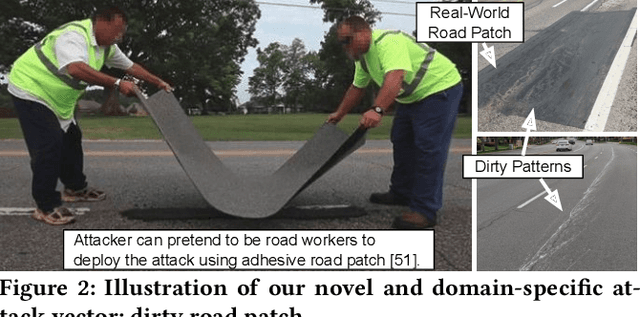
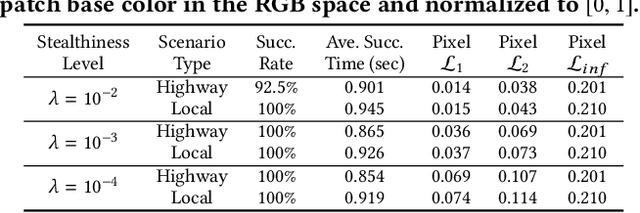
Automated Lane Centering (ALC) systems are convenient and widely deployed today, but also highly security and safety critical. In this work, we are the first to systematically study the security of state-of-the-art deep learning based ALC systems in their designed operational domains under physical-world adversarial attacks. We formulate the problem with a safety-critical attack goal, and a novel and domain-specific attack vector: dirty road patches. To systematically generate the attack, we adopt an optimization-based approach and overcome domain-specific design challenges such as camera frame inter-dependencies due to dynamic vehicle actuation, and the lack of objective function design for lane detection models. We evaluate our attack method on a production ALC system using 80 attack scenarios from real-world driving traces. The results show that our attack is highly effective with over 92% success rates and less than 0.95 sec average success time, which is substantially lower than the average driver reaction time. Such high attack effectiveness is also found (1) robust to motion model inaccuracies, different lane detection model designs, and physical-world factors, and (2) stealthy from the driver's view. To concretely understand the end-to-end safety consequences, we further evaluate on concrete real-world attack scenarios using a production-grade simulator, and find that our attack can successfully cause the victim to hit the highway concrete barrier or a truck in the opposite direction with 98% and 100% success rates. We also discuss defense directions.