 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-diseases detection with memristive system on chip
Oct 18, 2024



This study presents the first implementation of multilayer neural networks on a memristor/CMOS integrated system on chip (SoC) to simultaneously detect multiple diseases. To overcome limitations in medical data, generative AI techniques are used to enhance the dataset, improving the classifier's robustness and diversity. The system achieves notable performance with low latency, high accuracy (91.82%), and energy efficiency, facilitated by end-to-end execution on a memristor-based SoC with ten 256x256 crossbar arrays and an integrated on-chip processor. This research showcases the transformative potential of memristive in-memory computing hardware in accelerating machine learning applications for medical diagnostics.
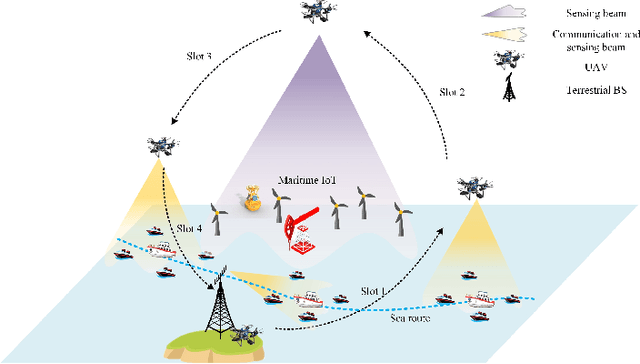
Edge Information Hub-Empowered 6G NTN: Latency-Oriented Resource Orchestration and Configuration
May 21, 2024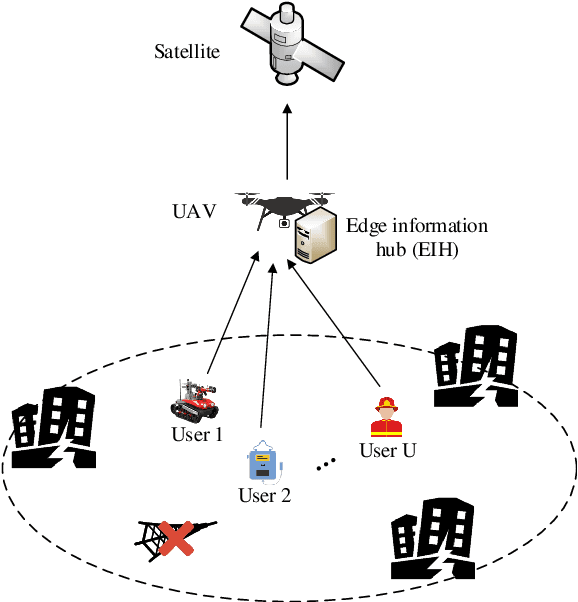
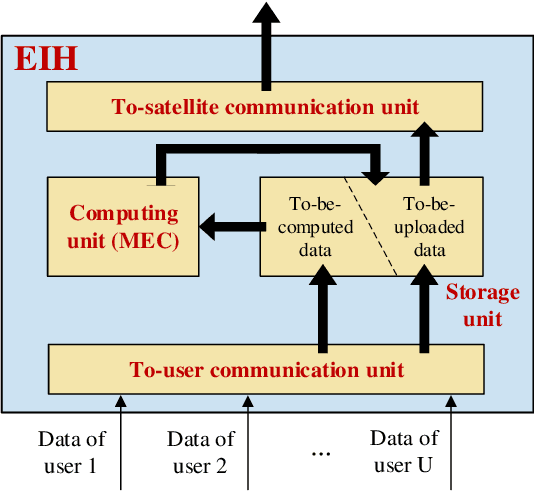
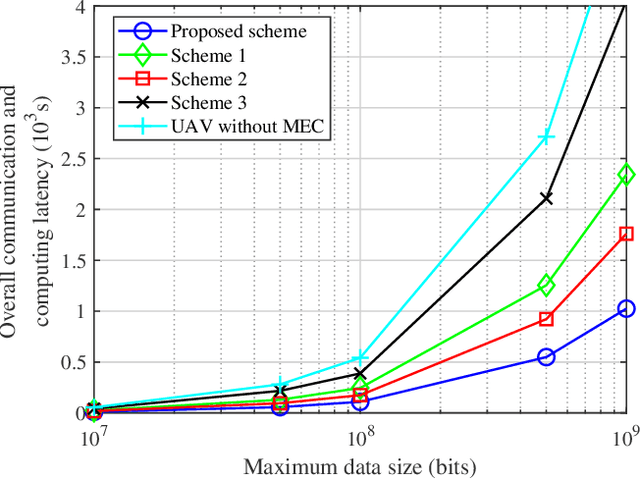
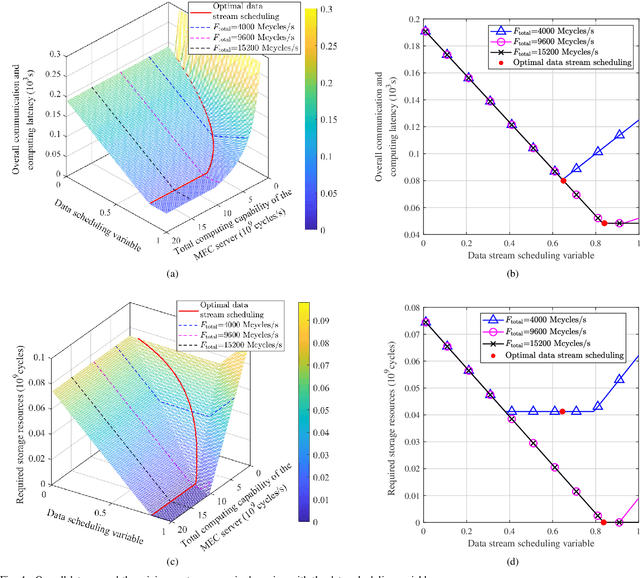
Quick response to disasters is crucial for saving lives and reducing loss. This requires low-latency uploading of situation information to the remote command center. Since terrestrial infrastructures are often damaged in disaster areas, non-terrestrial networks (NTNs) are preferable to provide network coverage, and mobile edge computing (MEC) could be integrated to improve the latency performance. Nevertheless, the communications and computing in MEC-enabled NTNs are strongly coupled, which complicates the system design. In this paper, an edge information hub (EIH) that incorporates communication, computing and storage capabilities is proposed to synergize communication and computing and enable systematic design. We first address the joint data scheduling and resource orchestration problem to minimize the latency for uploading sensing data. The problem is solved using an optimal resource orchestration algorithm. On that basis, we propose the principles for resource configuration of the EIH considering payload constraints on size, weight and energy supply. Simulation results demonstrate the superiority of our proposed scheme in reducing the overall upload latency, thus enabling quick emergency rescue.
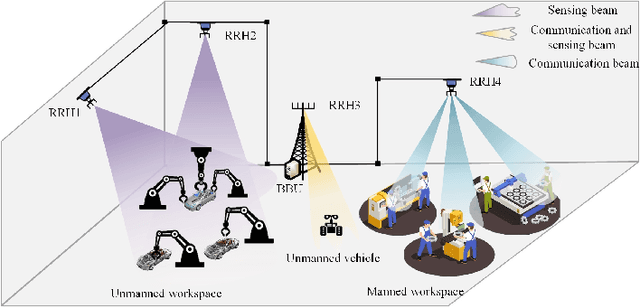
Radio Map-Based Spectrum Sharing for Joint Communication and Sensing
Jan 04, 2024



The sixth-generation (6G) network is expected to provide both communication and sensing (C&S) services. However, spectrum scarcity poses a major challenge to the harmonious coexistence of C&S systems. Without effective cooperation, the interference resulting from spectrum sharing impairs the performance of both systems. This paper addresses C&S interference within a distributed network. Different from traditional schemes that require pilot-based high-frequency interactions between C&S systems, we introduce a third party named the radio map to provide the large-scale channel state information (CSI). With large-scale CSI, we optimize the transmit power of C&S systems to maximize the signal-to-interference-plus-noise ratio (SINR) for the radar detection, while meeting the ergodic rate requirement of the interfered user. Given the non-convexity of both the objective and constraint, we employ the techniques of auxiliary-function-based scaling and fraction programming for simplification. Subsequently, we propose an iterative algorithm to solve this problem. Simulation results collaborate our idea that the extrinsic information, i.e., positions and surroundings, is effective to decouple C&S interference.
Sensing-Communication-Computing-Control Closed Loop for Unmanned Space Exploration
Aug 07, 2023



With a growing interest in outer space, space robots have become a focus of exploration. To coordinate them for unmanned space exploration, we propose to use the "mother-daughter structure". In this setup, the mother spacecraft orbits the planet, while daughter probes are distributed across the surface. The mother spacecraft senses the environment, computes control commands and distributes them to daughter probes to take actions. They synergistically form sensing-communication-computing-control ($\mathbf{SC^3}$) loops, which are indivisible. We thereby optimize the spacecraft-probe downlink within $\mathbf{SC^3}$ loops to minimize the sum linear quadratic regulator (LQR) cost. The optimization variables are block length and transmit power. On account of the cycle time constraint, the spacecraft-probe downlink operates in the finite block length (FBL) regime. To solve the nonlinear mixed-integer problem, we first identify the optimal block length and then transform the power allocation problem into a tractable convex one. Additionally, we derive the approximate closed-form solutions for the proposed scheme and also for the max-sum rate scheme and max-min rate scheme. On this basis, we reveal their different power allocation principles. Moreover, we find that for time-insensitive control tasks, the proposed scheme demonstrates equivalence to the max-min rate scheme. These findings are verified through simulations.
Control-Oriented Power Allocation for Integrated Satellite-UAV Networks
Aug 31, 2022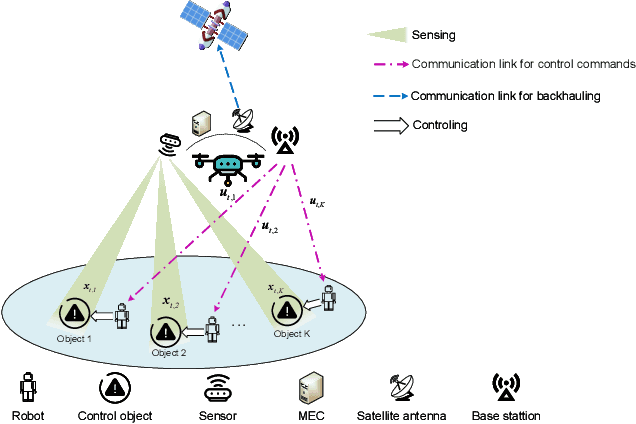
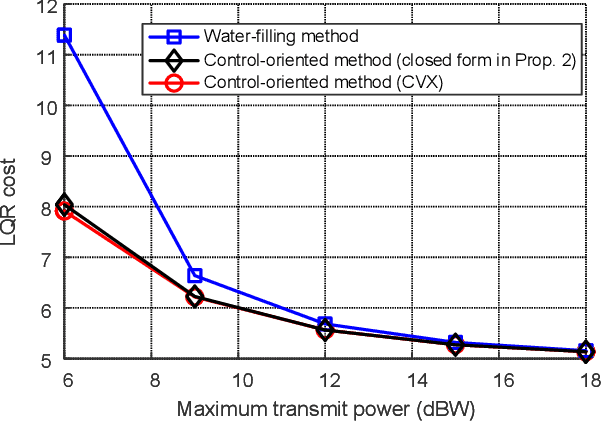
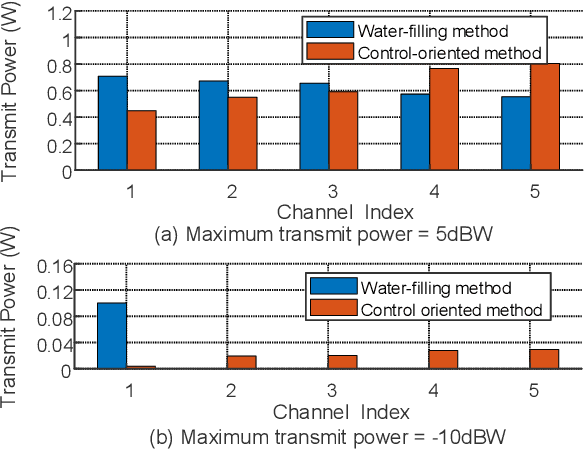
This letter presents a sensing-communication-computing-control (SC3) integrated satellite unmanned aerial vehicle (UAV) network, where the UAV is equipped with on-board sensors, mobile edge computing (MEC) servers, base stations and satellite communication module. Like the nervous system, this integrated network is capable of organizing multiple field robots in remote areas, so as to perform mission-critical tasks which are dangerous for human. Aiming at activating this nervous system with multiple SC3 loops, we present a control-oriented optimization problem. Different from traditional studies which mainly focused on communication metrics, we address the power allocation issue to minimize the sum linear quadratic regulator (LQR) control cost of all SC3 loops. Specifically, we show the convexity of the formulated problem and reveal the relationship between optimal transmit power and intrinsic entropy rate of different SC3 loops. For the assure-to-be-stable case, we derive a closed-form solution for ease of practical applications. After demonstrating the superiority of the control-oriented power allocation, we further highlight its difference with classic capacity-oriented water-filling method.
Joint Communication and Sensing: Models and Potentials of Using MIMO
May 19, 2022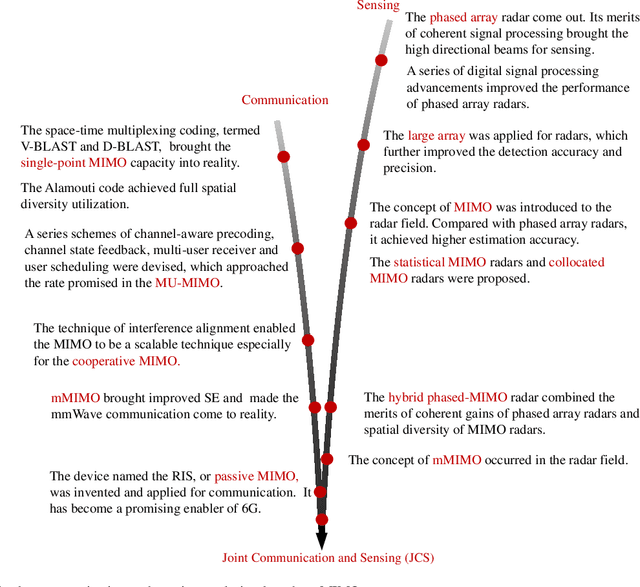
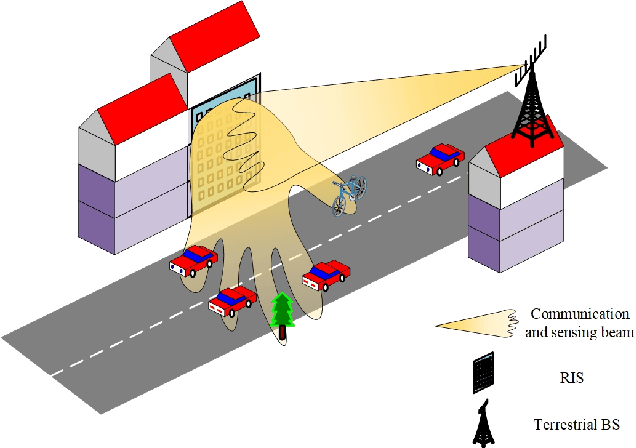
The sixth-generation (6G) network is envisioned to integrate communication and sensing functions, so as to improve the spectrum efficiency (SE) and support explosive novel applications. Although the similarities of wireless communication and radio sensing lay the foundation for their combinations, their different requirements for electromagnetic signals make the joint system design a hard task. To simultaneously guarantee sensing accuracy and communication capacity, the multiple-input and multiple-output (MIMO) technique plays an important role, due to its unique capability of spatial beamforming and waveform shaping. However, the configuration of MIMO also brings high hardware cost, high power consumption, and high signal processing complexity. How to efficiently apply MIMO in the joint communication and sensing (JCAS) system is still open. In this survey, we discuss JCAS in the context of MIMO configurations. We first outline the roles of MIMO in the progress of communication and radar sensing. Then, we review current advances in both communication and sensing coexistence and integration in detail. Three novel JCAS MIMO models are subsequently discussed by introducing the promising 6G enablers, i.e., the unmanned aerial vehicle (UAV) and the reconfigurable intelligent surface (RIS). With the aim of building a compatible dual-function system, the benefits and challenges of MIMO in JCAS are summarized in each subsection. Promising solutions are also discussed from the system perspective with simple, intelligent and robust principles. In the end, open issues are outlined to envisage a comprehensive JCAS network in the near future.
Near-Field Rainbow: Wideband Beam Training for XL-MIMO
May 07, 2022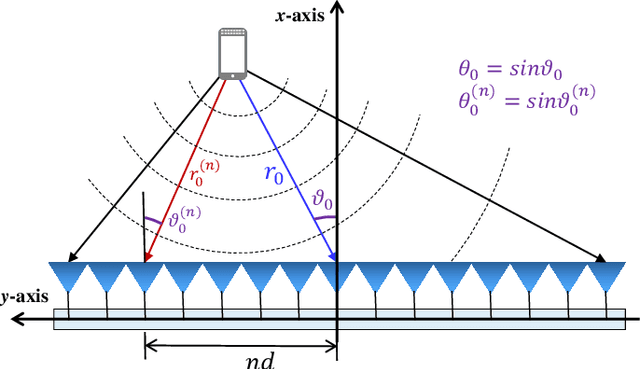
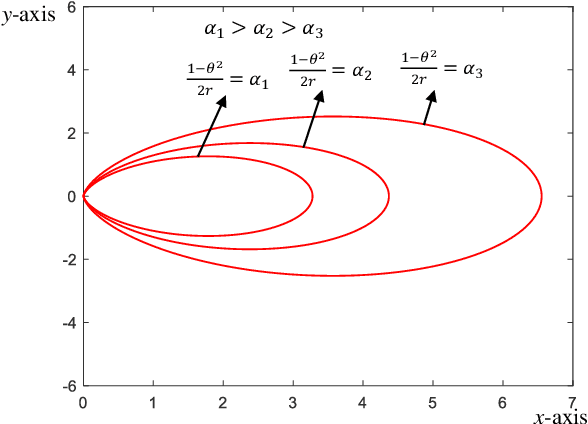
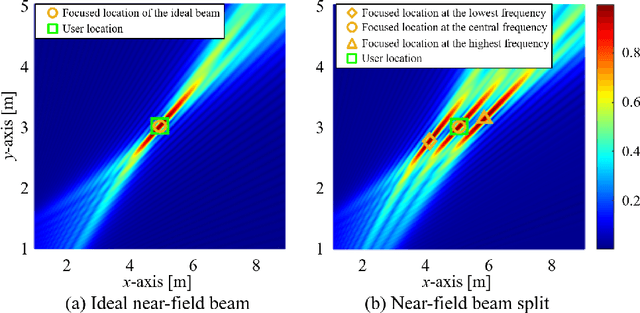
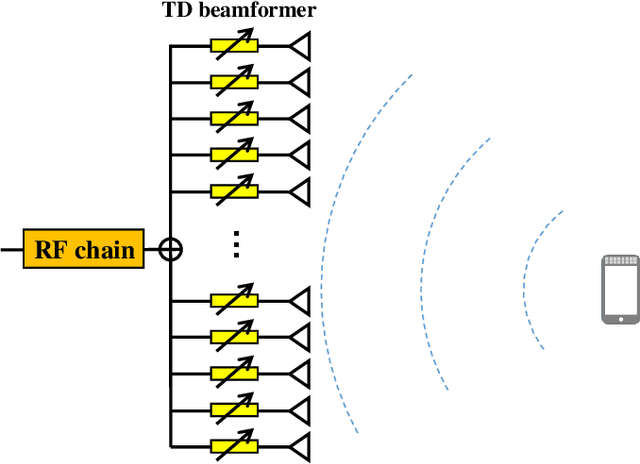
Wideband extremely large-scale multiple-input-multiple-output (XL-MIMO) is a promising technique to achieve Tbps data rates in future 6G systems through beamforming and spatial multiplexing. Due to the extensive bandwidth and the huge number of antennas for wideband XL-MIMO, a significant near-field beam split effect will be induced, where beams at different frequencies are focused on different locations. The near-field beam split effect results in a severe array gain loss, so existing works mainly focus on compensating for this loss by utilizing the time delay (TD) beamformer. By contrast, this paper demonstrates that although the near-field beam split effect degrades the array gain, it also provides a new possibility to realize fast near-field beam training. Specifically, we first reveal the mechanism of the near-field controllable beam split effect. This effect indicates that, by dedicatedly designing the delay parameters, a TD beamformer is able to control the degree of the near-field beam split effect, i.e., beams at different frequencies can flexibly occupy the desired location range. Due to the similarity with the dispersion of natural light caused by a prism, this effect is also termed as the near-field rainbow in this paper. Then, taking advantage of the near-field rainbow effect, a fast wideband beam training scheme is proposed. In our scheme, the close form of the beamforming vector is elaborately derived to enable beams at different frequencies to be focused on different desired locations. By this means, the optimal beamforming vector with the largest array gain can be rapidly searched out by generating multiple beams focused on multiple locations simultaneously through only one radio-frequency (RF) chain. Finally, simulation results demonstrate the proposed scheme is able to realize near-optimal nearfield beam training with a very low training overhead.
Reinforcement Learning-Empowered Mobile Edge Computing for 6G Edge Intelligence
Feb 03, 2022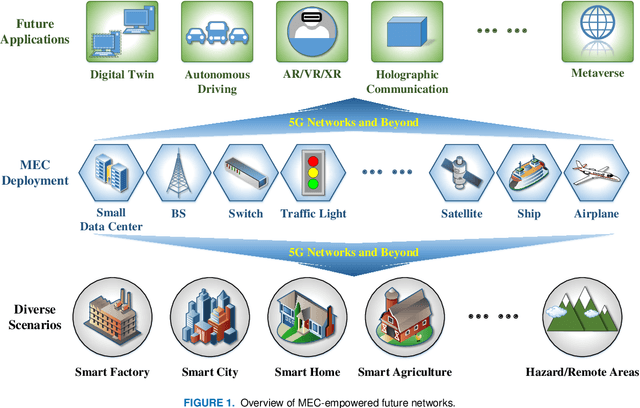
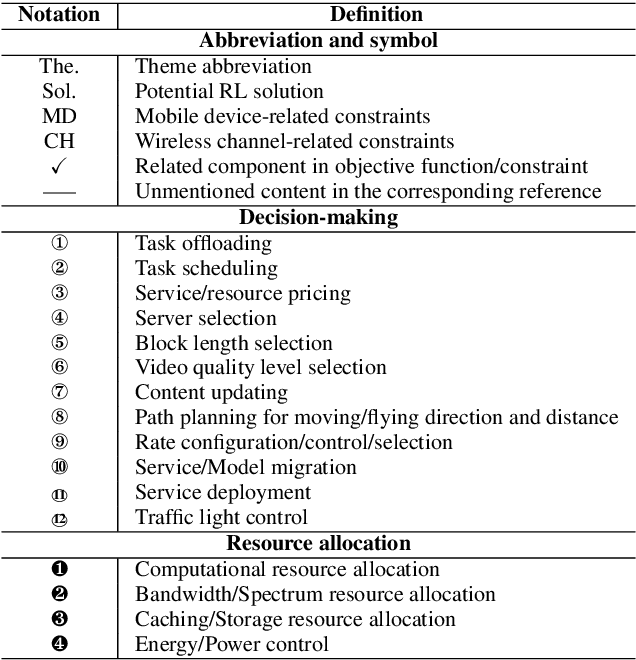
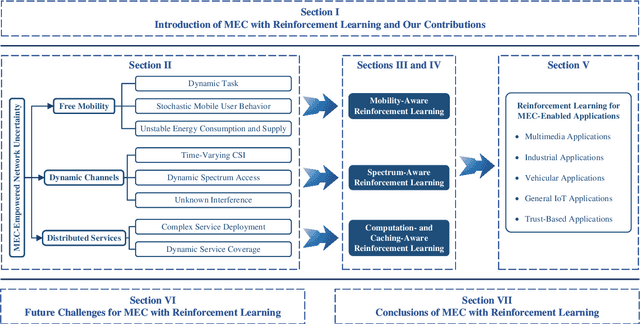
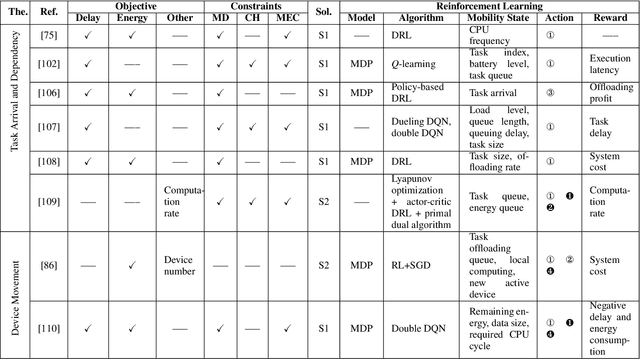
Mobile edge computing (MEC) is considered a novel paradigm for computation-intensive and delay-sensitive tasks in fifth generation (5G) networks and beyond. However, its uncertainty, referred to as dynamic and randomness, from the mobile device, wireless channel, and edge network sides, results in high-dimensional, nonconvex, nonlinear, and NP-hard optimization problems. Thanks to the evolved reinforcement learning (RL), upon iteratively interacting with the dynamic and random environment, its trained agent can intelligently obtain the optimal policy in MEC. Furthermore, its evolved versions, such as deep RL (DRL), can achieve higher convergence speed efficiency and learning accuracy based on the parametric approximation for the large-scale state-action space. This paper provides a comprehensive research review on RL-enabled MEC and offers insight for development in this area. More importantly, associated with free mobility, dynamic channels, and distributed services, the MEC challenges that can be solved by different kinds of RL algorithms are identified, followed by how they can be solved by RL solutions in diverse mobile applications. Finally, the open challenges are discussed to provide helpful guidance for future research in RL training and learning MEC.
Physical Layer Security for UAV Communications in 5G and Beyond Networks
May 24, 2021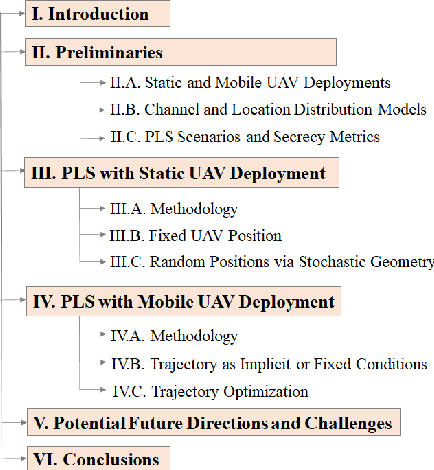
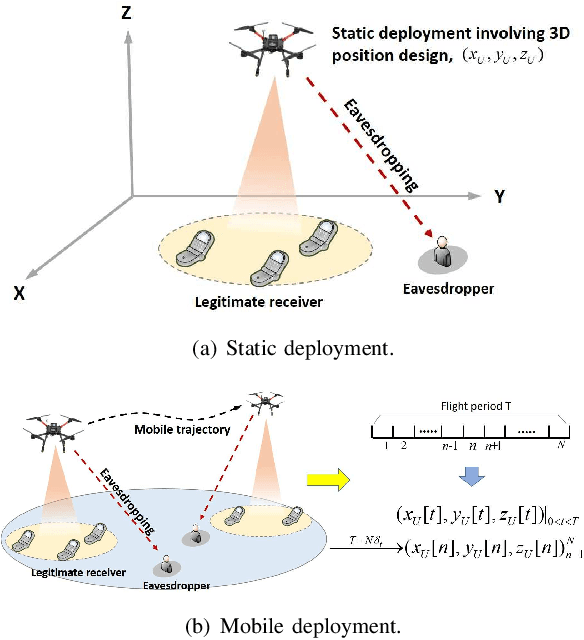
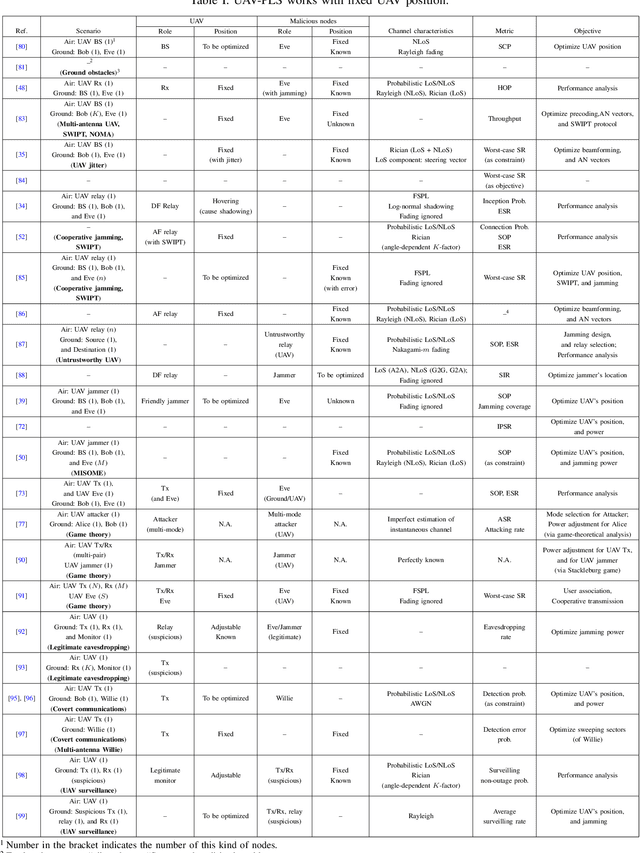
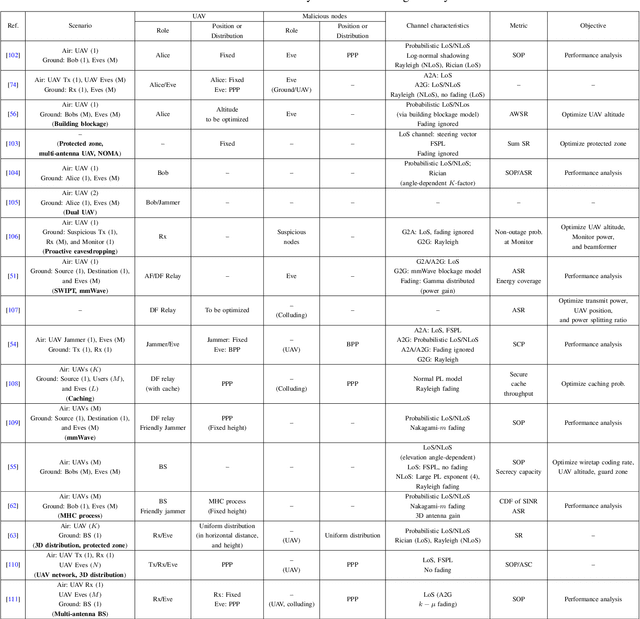
Due to its high mobility and flexible deployment, unmanned aerial vehicle (UAV) is drawing unprecedented interest in both military and civil applications to enable agile wireless communications and provide ubiquitous connectivity. Mainly operating in an open environment, UAV communications can benefit from dominant line-of-sight links; however, it on the other hand renders the UAVs more vulnerable to malicious eavesdropping or jamming attacks. Recently, physical layer security (PLS), which exploits the inherent randomness of the wireless channels for secure communications, has been introduced to UAV systems as an important complement to the conventional cryptography-based approaches. In this paper, a comprehensive survey on the current achievements of the UAV-aided wireless communications is conducted from the PLS perspective. We first introduce the basic concepts of UAV communications including the typical static/mobile deployment scenarios, the unique characteristics of air-to-ground channels, as well as various roles that a UAV may act when PLS is concerned. Then, we introduce the widely used secrecy performance metrics and start by reviewing the secrecy performance analysis and enhancing techniques for statically deployed UAV systems, and extend the discussion to a more general scenario where the UAVs' mobility is further exploited. For both cases, respectively, we summarize the commonly adopted methodologies in the corresponding analysis and design, then describe important works in the literature in detail. Finally, potential research directions and challenges are discussed to provide an outlook for future works in the area of UAV-PLS in 5G and beyond networks.
Get away from Style: Category-Guided Domain Adaptation for Semantic Segmentation
Mar 29, 2021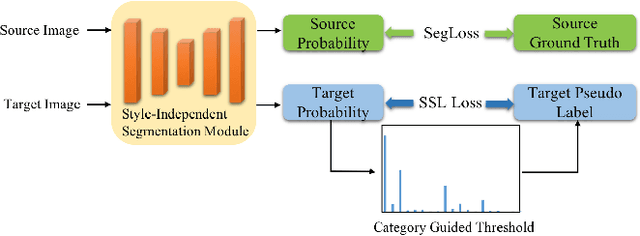
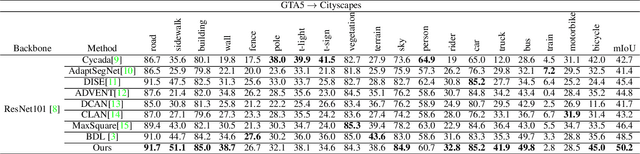
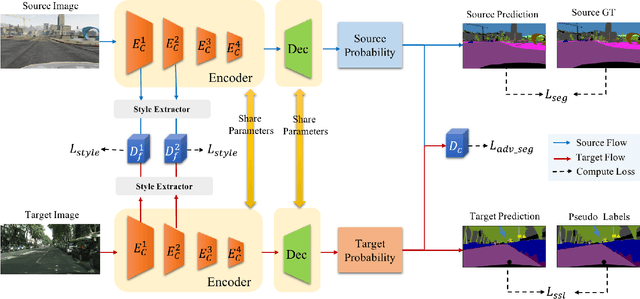
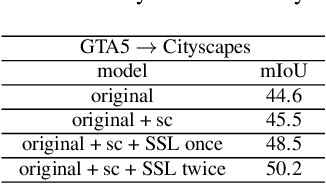
Unsupervised domain adaptation (UDA) becomes more and more popular in tackling real-world problems without ground truth of the target domain. Though a mass of tedious annotation work is not needed, UDA unavoidably faces the problem how to narrow the domain discrepancy to boost the transferring performance. In this paper, we focus on UDA for semantic segmentation task. Firstly, we propose a style-independent content feature extraction mechanism to keep the style information of extracted features in the similar space, since the style information plays a extremely slight role for semantic segmentation compared with the content part. Secondly, to keep the balance of pseudo labels on each category, we propose a category-guided threshold mechanism to choose category-wise pseudo labels for self-supervised learning. The experiments are conducted using GTA5 as the source domain, Cityscapes as the target domain. The results show that our model outperforms the state-of-the-arts with a noticeable gain on cross-domain adaptation tasks.