 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSensing-Communication-Computing-Control Closed Loop for Unmanned Space Exploration
Aug 07, 2023



With a growing interest in outer space, space robots have become a focus of exploration. To coordinate them for unmanned space exploration, we propose to use the "mother-daughter structure". In this setup, the mother spacecraft orbits the planet, while daughter probes are distributed across the surface. The mother spacecraft senses the environment, computes control commands and distributes them to daughter probes to take actions. They synergistically form sensing-communication-computing-control ($\mathbf{SC^3}$) loops, which are indivisible. We thereby optimize the spacecraft-probe downlink within $\mathbf{SC^3}$ loops to minimize the sum linear quadratic regulator (LQR) cost. The optimization variables are block length and transmit power. On account of the cycle time constraint, the spacecraft-probe downlink operates in the finite block length (FBL) regime. To solve the nonlinear mixed-integer problem, we first identify the optimal block length and then transform the power allocation problem into a tractable convex one. Additionally, we derive the approximate closed-form solutions for the proposed scheme and also for the max-sum rate scheme and max-min rate scheme. On this basis, we reveal their different power allocation principles. Moreover, we find that for time-insensitive control tasks, the proposed scheme demonstrates equivalence to the max-min rate scheme. These findings are verified through simulations.
Joint Communication and Sensing: Models and Potentials of Using MIMO
May 19, 2022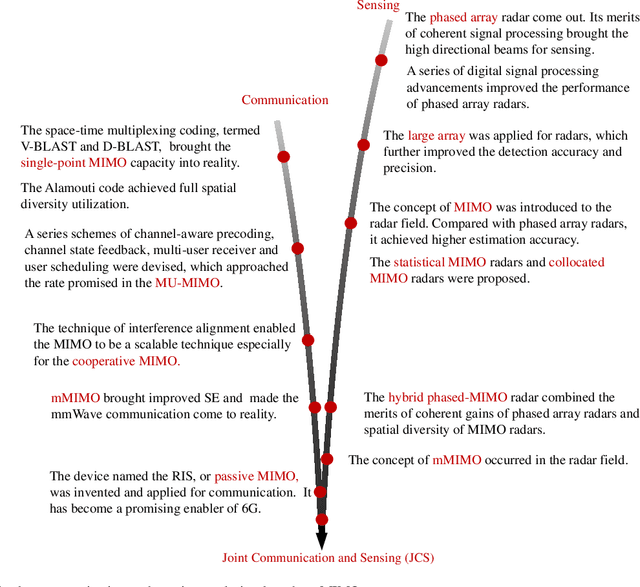
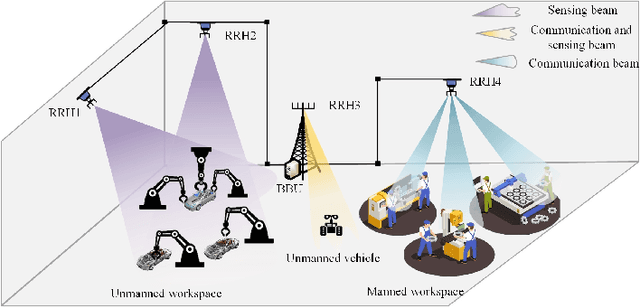
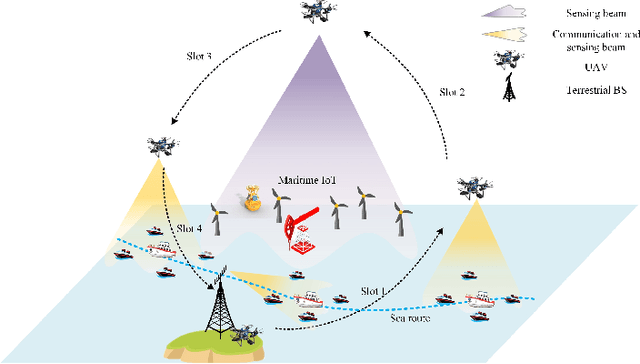
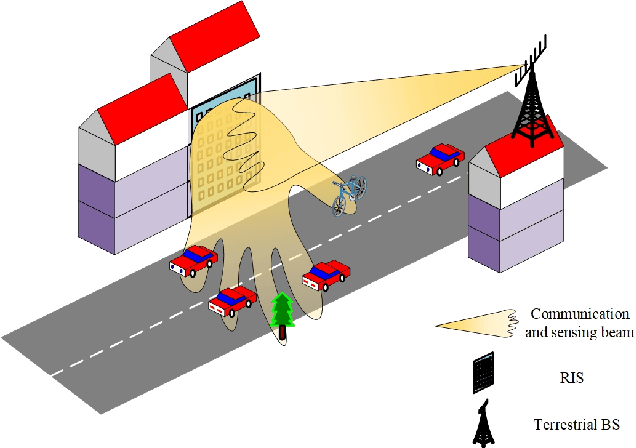
The sixth-generation (6G) network is envisioned to integrate communication and sensing functions, so as to improve the spectrum efficiency (SE) and support explosive novel applications. Although the similarities of wireless communication and radio sensing lay the foundation for their combinations, their different requirements for electromagnetic signals make the joint system design a hard task. To simultaneously guarantee sensing accuracy and communication capacity, the multiple-input and multiple-output (MIMO) technique plays an important role, due to its unique capability of spatial beamforming and waveform shaping. However, the configuration of MIMO also brings high hardware cost, high power consumption, and high signal processing complexity. How to efficiently apply MIMO in the joint communication and sensing (JCAS) system is still open. In this survey, we discuss JCAS in the context of MIMO configurations. We first outline the roles of MIMO in the progress of communication and radar sensing. Then, we review current advances in both communication and sensing coexistence and integration in detail. Three novel JCAS MIMO models are subsequently discussed by introducing the promising 6G enablers, i.e., the unmanned aerial vehicle (UAV) and the reconfigurable intelligent surface (RIS). With the aim of building a compatible dual-function system, the benefits and challenges of MIMO in JCAS are summarized in each subsection. Promising solutions are also discussed from the system perspective with simple, intelligent and robust principles. In the end, open issues are outlined to envisage a comprehensive JCAS network in the near future.