 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConstrained Dynamic Gaussian Splatting
Feb 03, 2026While Dynamic Gaussian Splatting enables high-fidelity 4D reconstruction, its deployment is severely hindered by a fundamental dilemma: unconstrained densification leads to excessive memory consumption incompatible with edge devices, whereas heuristic pruning fails to achieve optimal rendering quality under preset Gaussian budgets. In this work, we propose Constrained Dynamic Gaussian Splatting (CDGS), a novel framework that formulates dynamic scene reconstruction as a budget-constrained optimization problem to enforce a strict, user-defined Gaussian budget during training. Our key insight is to introduce a differentiable budget controller as the core optimization driver. Guided by a multi-modal unified importance score, this controller fuses geometric, motion, and perceptual cues for precise capacity regulation. To maximize the utility of this fixed budget, we further decouple the optimization of static and dynamic elements, employing an adaptive allocation mechanism that dynamically distributes capacity based on motion complexity. Furthermore, we implement a three-phase training strategy to seamlessly integrate these constraints, ensuring precise adherence to the target count. Coupled with a dual-mode hybrid compression scheme, CDGS not only strictly adheres to hardware constraints (error < 2%}) but also pushes the Pareto frontier of rate-distortion performance. Extensive experiments demonstrate that CDGS delivers optimal rendering quality under varying capacity limits, achieving over 3x compression compared to state-of-the-art methods.
Physical Layer Security for UAV Communications in 5G and Beyond Networks
May 24, 2021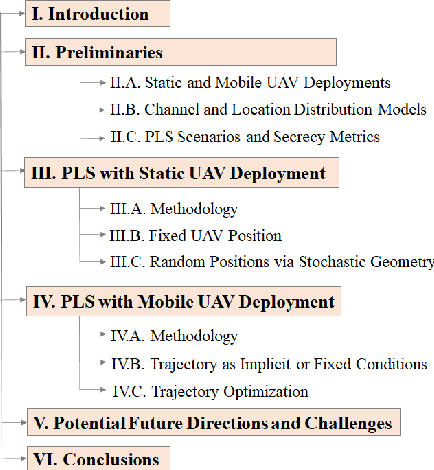
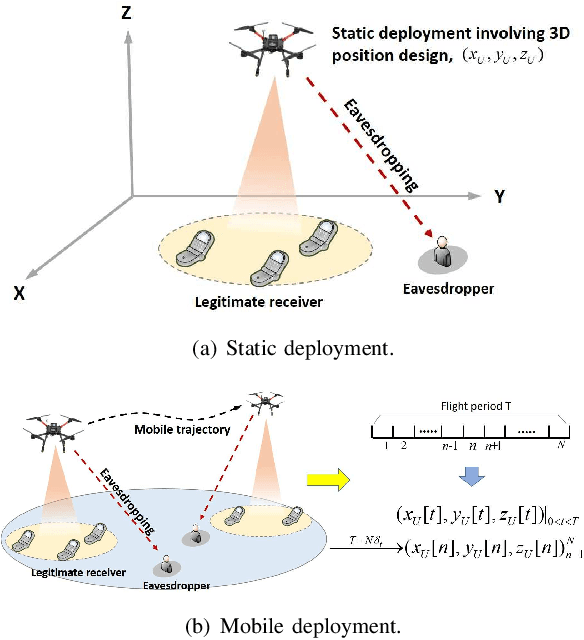
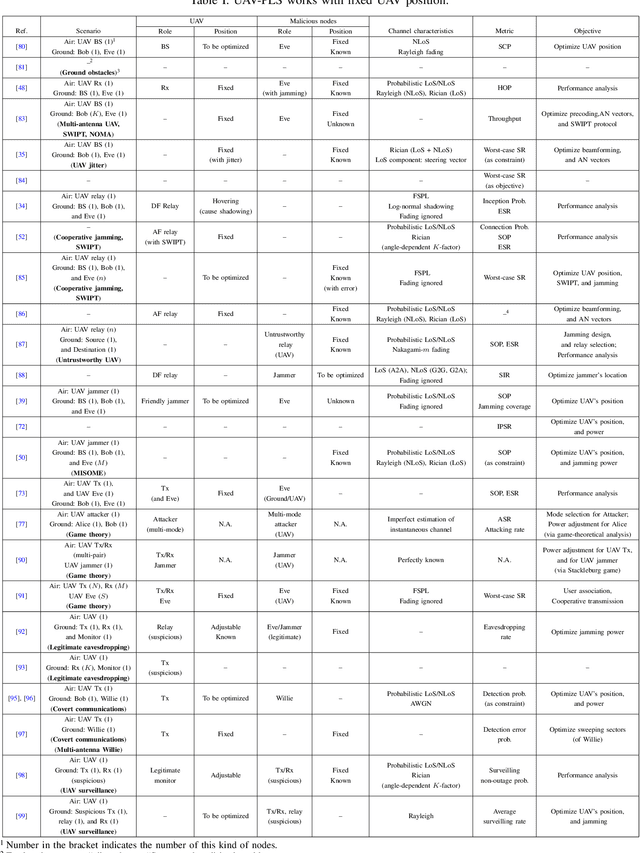
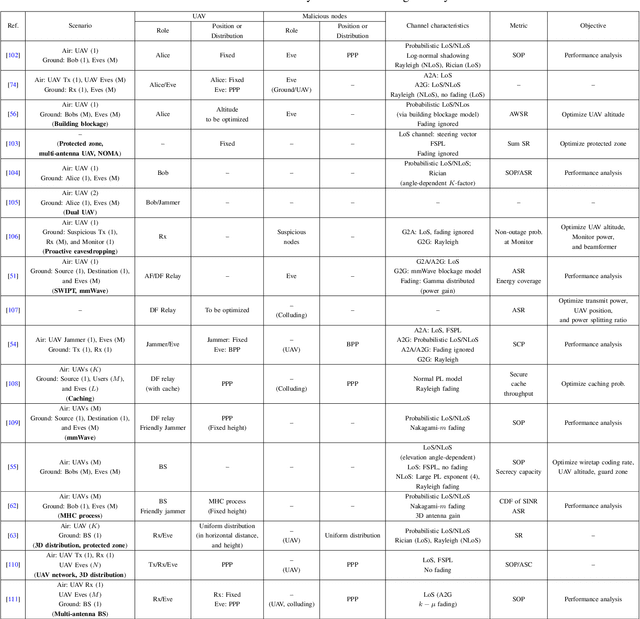
Due to its high mobility and flexible deployment, unmanned aerial vehicle (UAV) is drawing unprecedented interest in both military and civil applications to enable agile wireless communications and provide ubiquitous connectivity. Mainly operating in an open environment, UAV communications can benefit from dominant line-of-sight links; however, it on the other hand renders the UAVs more vulnerable to malicious eavesdropping or jamming attacks. Recently, physical layer security (PLS), which exploits the inherent randomness of the wireless channels for secure communications, has been introduced to UAV systems as an important complement to the conventional cryptography-based approaches. In this paper, a comprehensive survey on the current achievements of the UAV-aided wireless communications is conducted from the PLS perspective. We first introduce the basic concepts of UAV communications including the typical static/mobile deployment scenarios, the unique characteristics of air-to-ground channels, as well as various roles that a UAV may act when PLS is concerned. Then, we introduce the widely used secrecy performance metrics and start by reviewing the secrecy performance analysis and enhancing techniques for statically deployed UAV systems, and extend the discussion to a more general scenario where the UAVs' mobility is further exploited. For both cases, respectively, we summarize the commonly adopted methodologies in the corresponding analysis and design, then describe important works in the literature in detail. Finally, potential research directions and challenges are discussed to provide an outlook for future works in the area of UAV-PLS in 5G and beyond networks.