 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl-Oriented Power Allocation for Integrated Satellite-UAV Networks
Aug 31, 2022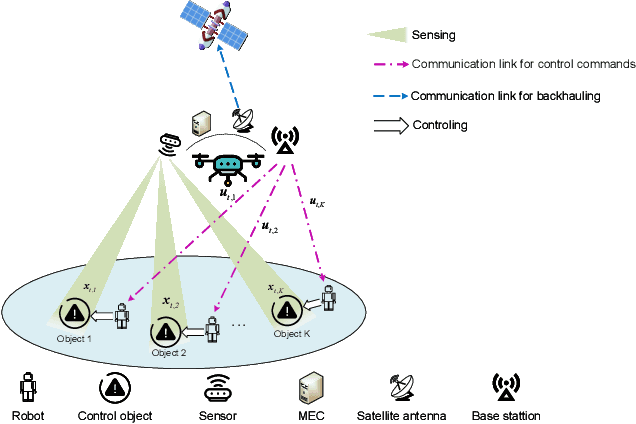
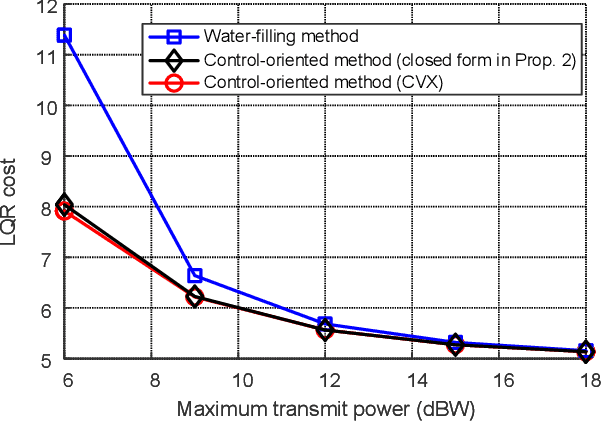
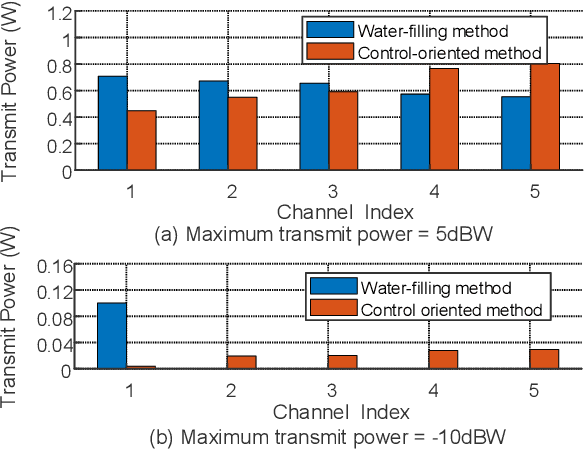
This letter presents a sensing-communication-computing-control (SC3) integrated satellite unmanned aerial vehicle (UAV) network, where the UAV is equipped with on-board sensors, mobile edge computing (MEC) servers, base stations and satellite communication module. Like the nervous system, this integrated network is capable of organizing multiple field robots in remote areas, so as to perform mission-critical tasks which are dangerous for human. Aiming at activating this nervous system with multiple SC3 loops, we present a control-oriented optimization problem. Different from traditional studies which mainly focused on communication metrics, we address the power allocation issue to minimize the sum linear quadratic regulator (LQR) control cost of all SC3 loops. Specifically, we show the convexity of the formulated problem and reveal the relationship between optimal transmit power and intrinsic entropy rate of different SC3 loops. For the assure-to-be-stable case, we derive a closed-form solution for ease of practical applications. After demonstrating the superiority of the control-oriented power allocation, we further highlight its difference with classic capacity-oriented water-filling method.
Physical Layer Security for UAV Communications in 5G and Beyond Networks
May 24, 2021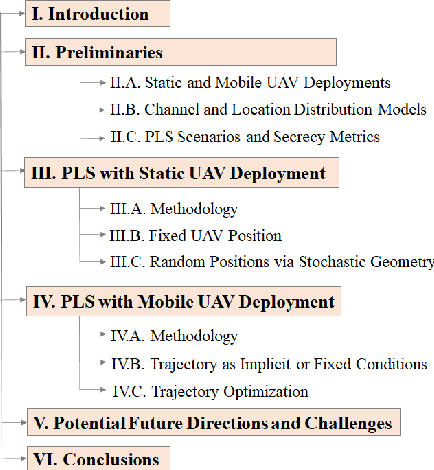
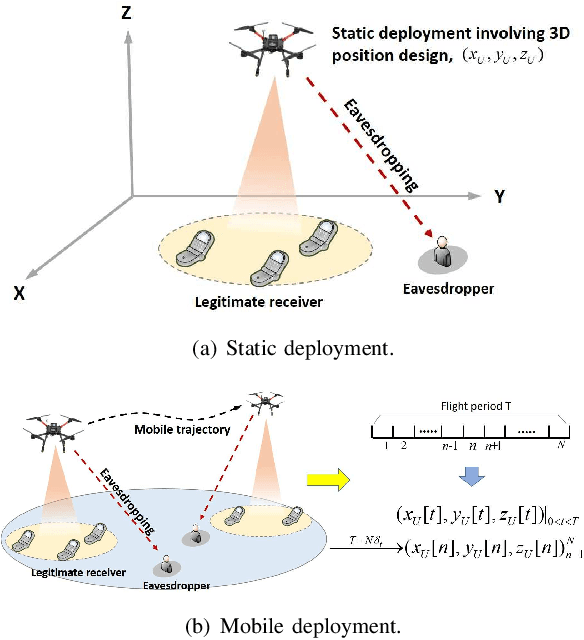
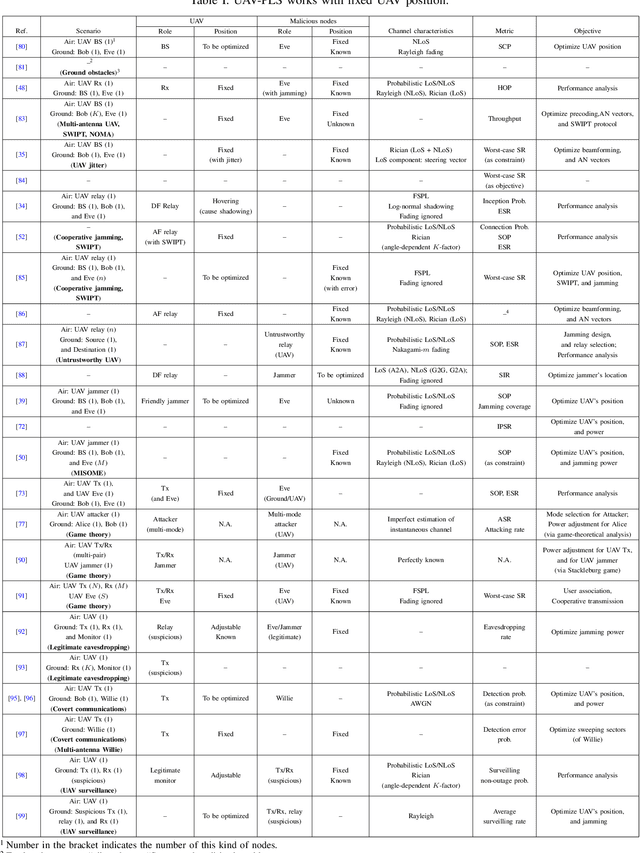
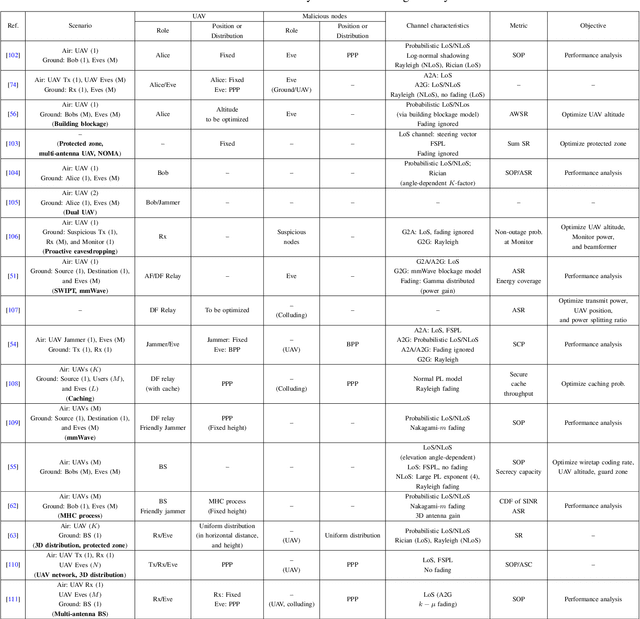
Due to its high mobility and flexible deployment, unmanned aerial vehicle (UAV) is drawing unprecedented interest in both military and civil applications to enable agile wireless communications and provide ubiquitous connectivity. Mainly operating in an open environment, UAV communications can benefit from dominant line-of-sight links; however, it on the other hand renders the UAVs more vulnerable to malicious eavesdropping or jamming attacks. Recently, physical layer security (PLS), which exploits the inherent randomness of the wireless channels for secure communications, has been introduced to UAV systems as an important complement to the conventional cryptography-based approaches. In this paper, a comprehensive survey on the current achievements of the UAV-aided wireless communications is conducted from the PLS perspective. We first introduce the basic concepts of UAV communications including the typical static/mobile deployment scenarios, the unique characteristics of air-to-ground channels, as well as various roles that a UAV may act when PLS is concerned. Then, we introduce the widely used secrecy performance metrics and start by reviewing the secrecy performance analysis and enhancing techniques for statically deployed UAV systems, and extend the discussion to a more general scenario where the UAVs' mobility is further exploited. For both cases, respectively, we summarize the commonly adopted methodologies in the corresponding analysis and design, then describe important works in the literature in detail. Finally, potential research directions and challenges are discussed to provide an outlook for future works in the area of UAV-PLS in 5G and beyond networks.