 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCambrian-S: Towards Spatial Supersensing in Video
Nov 06, 2025We argue that progress in true multimodal intelligence calls for a shift from reactive, task-driven systems and brute-force long context towards a broader paradigm of supersensing. We frame spatial supersensing as four stages beyond linguistic-only understanding: semantic perception (naming what is seen), streaming event cognition (maintaining memory across continuous experiences), implicit 3D spatial cognition (inferring the world behind pixels), and predictive world modeling (creating internal models that filter and organize information). Current benchmarks largely test only the early stages, offering narrow coverage of spatial cognition and rarely challenging models in ways that require true world modeling. To drive progress in spatial supersensing, we present VSI-SUPER, a two-part benchmark: VSR (long-horizon visual spatial recall) and VSC (continual visual spatial counting). These tasks require arbitrarily long video inputs yet are resistant to brute-force context expansion. We then test data scaling limits by curating VSI-590K and training Cambrian-S, achieving +30% absolute improvement on VSI-Bench without sacrificing general capabilities. Yet performance on VSI-SUPER remains limited, indicating that scale alone is insufficient for spatial supersensing. We propose predictive sensing as a path forward, presenting a proof-of-concept in which a self-supervised next-latent-frame predictor leverages surprise (prediction error) to drive memory and event segmentation. On VSI-SUPER, this approach substantially outperforms leading proprietary baselines, showing that spatial supersensing requires models that not only see but also anticipate, select, and organize experience.
DenseMatcher: Learning 3D Semantic Correspondence for Category-Level Manipulation from a Single Demo
Dec 06, 2024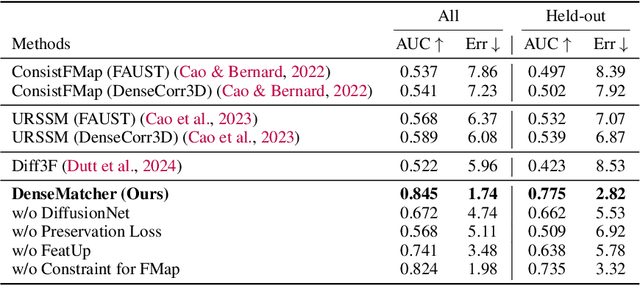
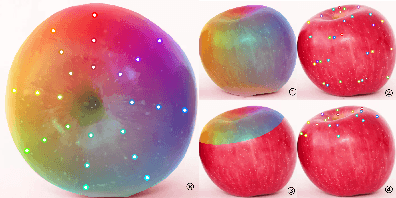
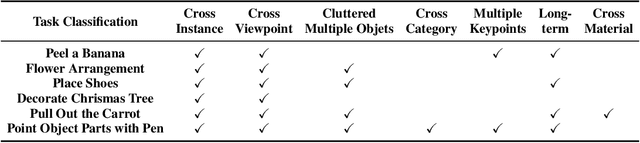

Dense 3D correspondence can enhance robotic manipulation by enabling the generalization of spatial, functional, and dynamic information from one object to an unseen counterpart. Compared to shape correspondence, semantic correspondence is more effective in generalizing across different object categories. To this end, we present DenseMatcher, a method capable of computing 3D correspondences between in-the-wild objects that share similar structures. DenseMatcher first computes vertex features by projecting multiview 2D features onto meshes and refining them with a 3D network, and subsequently finds dense correspondences with the obtained features using functional map. In addition, we craft the first 3D matching dataset that contains colored object meshes across diverse categories. In our experiments, we show that DenseMatcher significantly outperforms prior 3D matching baselines by 43.5%. We demonstrate the downstream effectiveness of DenseMatcher in (i) robotic manipulation, where it achieves cross-instance and cross-category generalization on long-horizon complex manipulation tasks from observing only one demo; (ii) zero-shot color mapping between digital assets, where appearance can be transferred between different objects with relatable geometry.
3D Diffusion Policy
Mar 06, 2024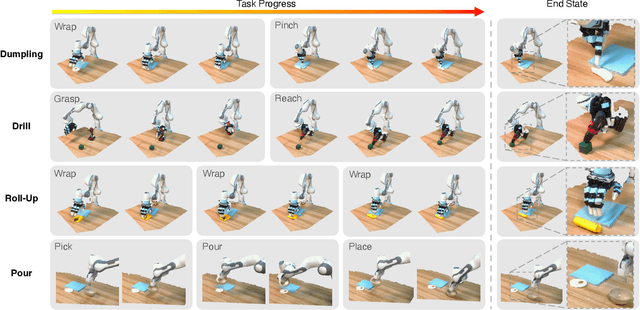
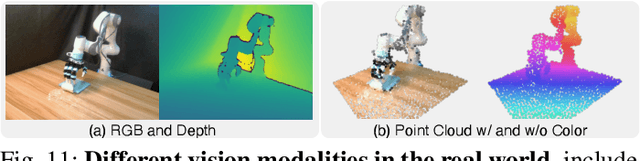
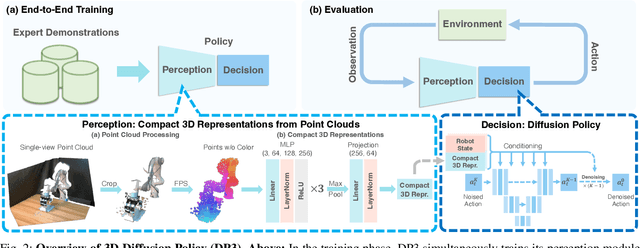
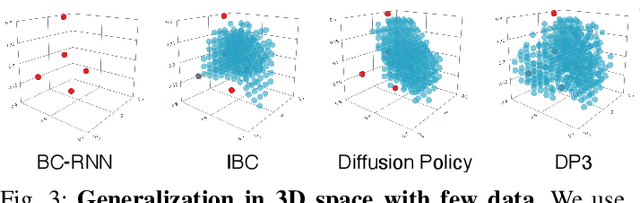
Imitation learning provides an efficient way to teach robots dexterous skills; however, learning complex skills robustly and generalizablely usually consumes large amounts of human demonstrations. To tackle this challenging problem, we present 3D Diffusion Policy (DP3), a novel visual imitation learning approach that incorporates the power of 3D visual representations into diffusion policies, a class of conditional action generative models. The core design of DP3 is the utilization of a compact 3D visual representation, extracted from sparse point clouds with an efficient point encoder. In our experiments involving 72 simulation tasks, DP3 successfully handles most tasks with just 10 demonstrations and surpasses baselines with a 55.3% relative improvement. In 4 real robot tasks, DP3 demonstrates precise control with a high success rate of 85%, given only 40 demonstrations of each task, and shows excellent generalization abilities in diverse aspects, including space, viewpoint, appearance, and instance. Interestingly, in real robot experiments, DP3 rarely violates safety requirements, in contrast to baseline methods which frequently do, necessitating human intervention. Our extensive evaluation highlights the critical importance of 3D representations in real-world robot learning. Videos, code, and data are available on https://3d-diffusion-policy.github.io .
A Robust Super-resolution Gridless Imaging Framework for UAV-borne SAR Tomography
Feb 02, 2024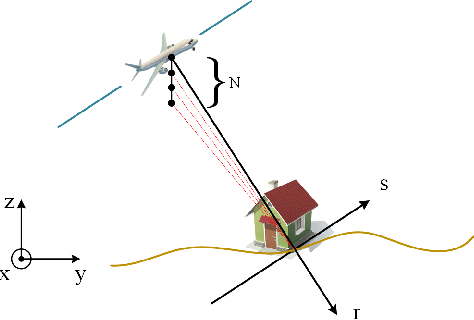
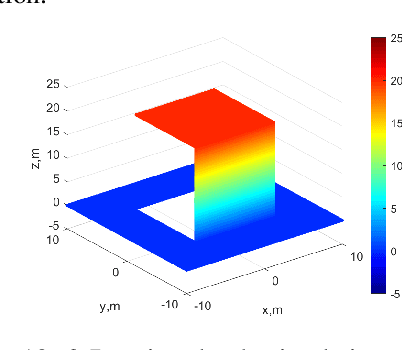
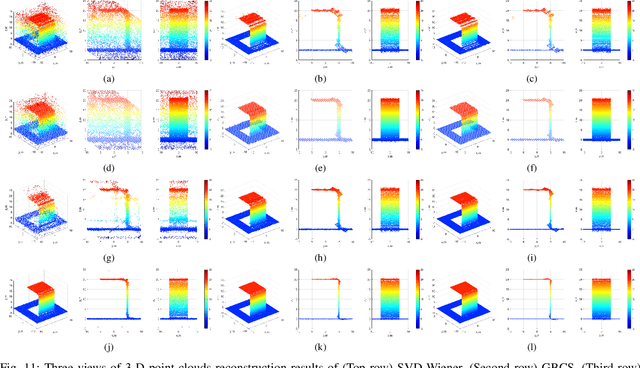
Synthetic aperture radar (SAR) tomography (TomoSAR) retrieves three-dimensional (3-D) information from multiple SAR images, effectively addresses the layover problem, and has become pivotal in urban mapping. Unmanned aerial vehicle (UAV) has gained popularity as a TomoSAR platform, offering distinct advantages such as the ability to achieve 3-D imaging in a single flight, cost-effectiveness, rapid deployment, and flexible trajectory planning. The evolution of compressed sensing (CS) has led to the widespread adoption of sparse reconstruction techniques in TomoSAR signal processing, with a focus on $\ell _1$ norm regularization and other grid-based CS methods. However, the discretization of illuminated scene along elevation introduces modeling errors, resulting in reduced reconstruction accuracy, known as the "off-grid" effect. Recent advancements have introduced gridless CS algorithms to mitigate this issue. This paper presents an innovative gridless 3-D imaging framework tailored for UAV-borne TomoSAR. Capitalizing on the pulse repetition frequency (PRF) redundancy inherent in slow UAV platforms, a multiple measurement vectors (MMV) model is constructed to enhance noise immunity without compromising azimuth-range resolution. Given the sparsely placed array elements due to mounting platform constraints, an atomic norm soft thresholding algorithm is proposed for partially observed MMV, offering gridless reconstruction capability and super-resolution. An efficient alternative optimization algorithm is also employed to enhance computational efficiency. Validation of the proposed framework is achieved through computer simulations and flight experiments, affirming its efficacy in UAV-borne TomoSAR applications.
Efficient Gridless DoA Estimation Method of Non-uniform Linear Arrays with Applications in Automotive Radars
Mar 08, 2023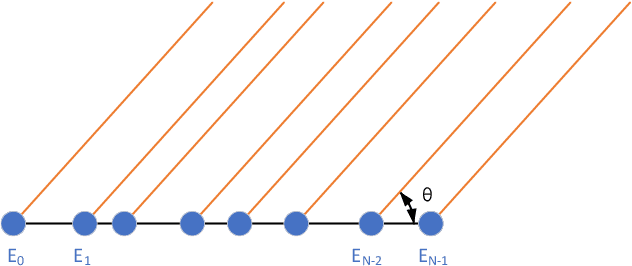
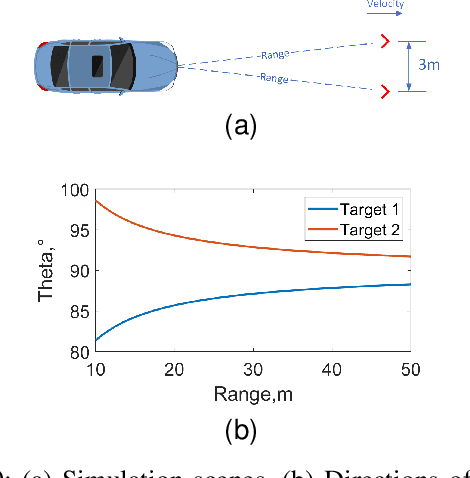
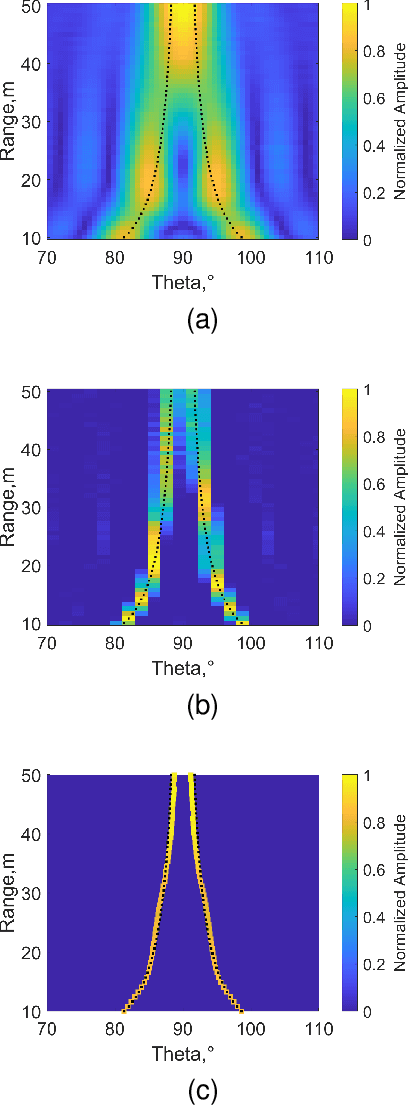

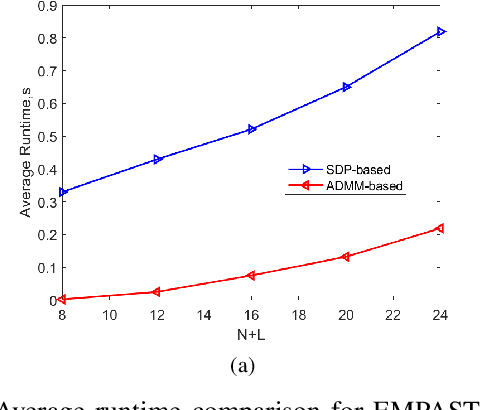
This paper focuses on the gridless direction-of-arrival (DoA) estimation for data acquired by non-uniform linear arrays (NLAs) in automotive applications. Atomic norm minimization (ANM) is a promising gridless sparse recovery algorithm under the Toeplitz model and solved by convex relaxation, thus it is only applicable to uniform linear arrays (ULAs) with array manifolds having a Vandermonde structure. In automotive applications, it is essential to apply the gridless DoA estimation to NLAs with arbitrary geometry with efficiency. In this paper, a fast ANM-based gridless DoA estimation algorithm for NLAs is proposed, which employs the array manifold separation technique and the accelerated proximal gradient (APG) technique, making it applicable to NLAs without losing of efficiency. Simulation and measurement experiments on automotive multiple-input multiple-output (MIMO) radars demonstrate the superiority of the proposed method.
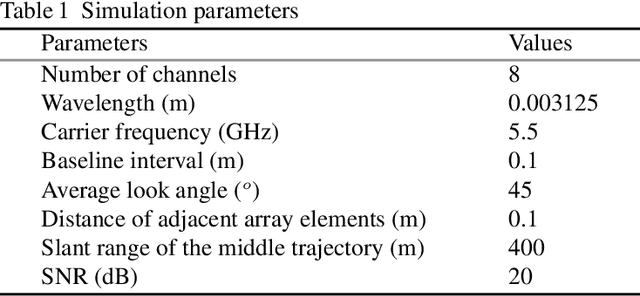
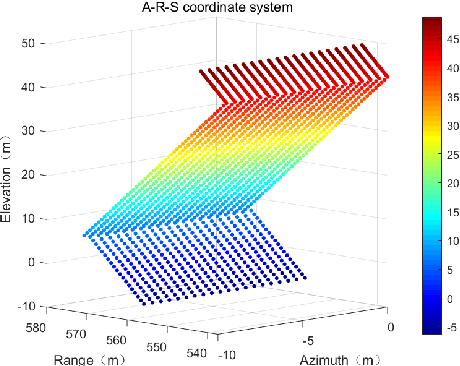
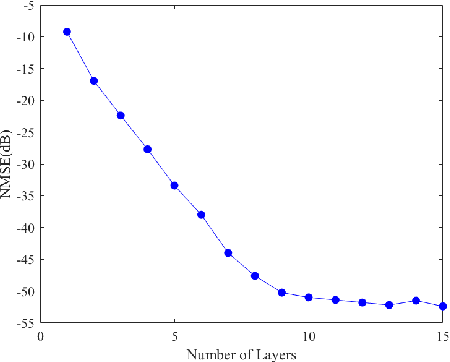
ATASI-Net: An Efficient Sparse Reconstruction Network for Tomographic SAR Imaging with Adaptive Threshold
Nov 30, 2022



Tomographic SAR technique has attracted remarkable interest for its ability of three-dimensional resolving along the elevation direction via a stack of SAR images collected from different cross-track angles. The emerged compressed sensing (CS)-based algorithms have been introduced into TomoSAR considering its super-resolution ability with limited samples. However, the conventional CS-based methods suffer from several drawbacks, including weak noise resistance, high computational complexity, and complex parameter fine-tuning. Aiming at efficient TomoSAR imaging, this paper proposes a novel efficient sparse unfolding network based on the analytic learned iterative shrinkage thresholding algorithm (ALISTA) architecture with adaptive threshold, named Adaptive Threshold ALISTA-based Sparse Imaging Network (ATASI-Net). The weight matrix in each layer of ATASI-Net is pre-computed as the solution of an off-line optimization problem, leaving only two scalar parameters to be learned from data, which significantly simplifies the training stage. In addition, adaptive threshold is introduced for each azimuth-range pixel, enabling the threshold shrinkage to be not only layer-varied but also element-wise. Moreover, the final learned thresholds can be visualized and combined with the SAR image semantics for mutual feedback. Finally, extensive experiments on simulated and real data are carried out to demonstrate the effectiveness and efficiency of the proposed method.
TomoSAR-ALISTA: Efficient TomoSAR Imaging via Deep Unfolded Network
May 05, 2022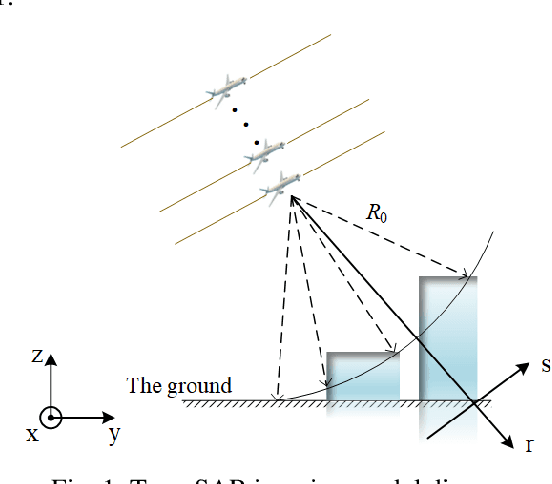
Synthetic aperture radar (SAR) tomography (TomoSAR) has attracted remarkable interest for its ability in achieving three-dimensional reconstruction along the elevation direction from multiple observations. In recent years, compressed sensing (CS) technique has been introduced into TomoSAR considering for its super-resolution ability with limited samples. Whereas, the CS-based methods suffer from several drawbacks, including weak noise resistance, high computational complexity and complex parameter fine-tuning. Among the different CS algorithms, iterative soft-thresholding algorithm (ISTA) is widely used as a robust reconstruction approach, however, the parameters in the ISTA algorithm are manually chosen, which usually requires a time-consuming fine-tuning process to achieve the best performance. Aiming at efficient TomoSAR imaging, a novel sparse unfolding network named analytic learned ISTA (ALISTA) is proposed towards the TomoSAR imaging problem in this paper, and the key parameters of ISTA are learned from training data via deep learning to avoid complex parameter fine-tuning and significantly relieves the training burden. In addition, experiments verify that it is feasible to use traditional CS algorithms as training labels, which provides a tangible supervised training method to achieve better 3D reconstruction performance even in the absence of labeled data in real applications.