 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDistill CLIP (DCLIP): Enhancing Image-Text Retrieval via Cross-Modal Transformer Distillation
Jun 01, 2025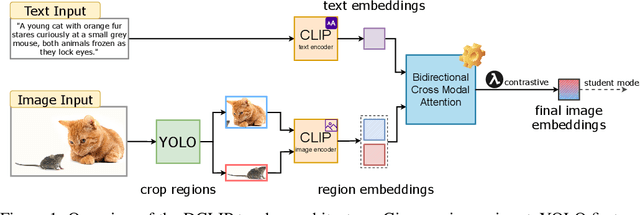

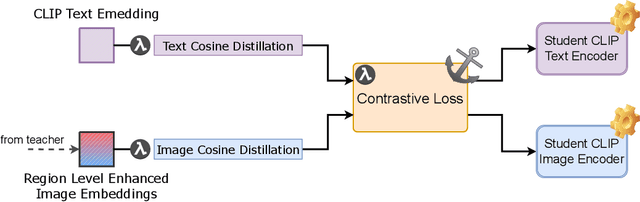
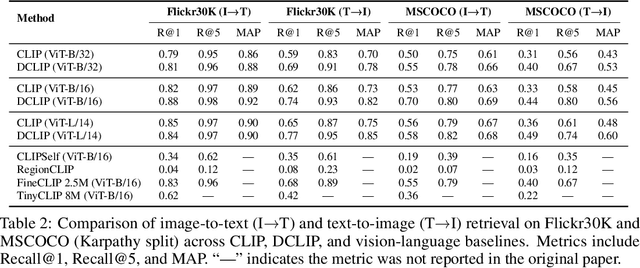
We present Distill CLIP (DCLIP), a fine-tuned variant of the CLIP model that enhances multimodal image-text retrieval while preserving the original model's strong zero-shot classification capabilities. CLIP models are typically constrained by fixed image resolutions and limited context, which can hinder their effectiveness in retrieval tasks that require fine-grained cross-modal understanding. DCLIP addresses these challenges through a meta teacher-student distillation framework, where a cross-modal transformer teacher is fine-tuned to produce enriched embeddings via bidirectional cross-attention between YOLO-extracted image regions and corresponding textual spans. These semantically and spatially aligned global representations guide the training of a lightweight student model using a hybrid loss that combines contrastive learning and cosine similarity objectives. Despite being trained on only ~67,500 samples curated from MSCOCO, Flickr30k, and Conceptual Captions-just a fraction of CLIP's original dataset-DCLIP significantly improves image-text retrieval metrics (Recall@K, MAP), while retaining approximately 94% of CLIP's zero-shot classification performance. These results demonstrate that DCLIP effectively mitigates the trade-off between task specialization and generalization, offering a resource-efficient, domain-adaptive, and detail-sensitive solution for advanced vision-language tasks. Code available at https://anonymous.4open.science/r/DCLIP-B772/README.md.
Rethinking the Global Convergence of Softmax Policy Gradient with Linear Function Approximation
May 06, 2025Policy gradient (PG) methods have played an essential role in the empirical successes of reinforcement learning. In order to handle large state-action spaces, PG methods are typically used with function approximation. In this setting, the approximation error in modeling problem-dependent quantities is a key notion for characterizing the global convergence of PG methods. We focus on Softmax PG with linear function approximation (referred to as $\texttt{Lin-SPG}$) and demonstrate that the approximation error is irrelevant to the algorithm's global convergence even for the stochastic bandit setting. Consequently, we first identify the necessary and sufficient conditions on the feature representation that can guarantee the asymptotic global convergence of $\texttt{Lin-SPG}$. Under these feature conditions, we prove that $T$ iterations of $\texttt{Lin-SPG}$ with a problem-specific learning rate result in an $O(1/T)$ convergence to the optimal policy. Furthermore, we prove that $\texttt{Lin-SPG}$ with any arbitrary constant learning rate can ensure asymptotic global convergence to the optimal policy.
NewsInterview: a Dataset and a Playground to Evaluate LLMs' Ground Gap via Informational Interviews
Nov 21, 2024



Large Language Models (LLMs) have demonstrated impressive capabilities in generating coherent text but often struggle with grounding language and strategic dialogue. To address this gap, we focus on journalistic interviews, a domain rich in grounding communication and abundant in data. We curate a dataset of 40,000 two-person informational interviews from NPR and CNN, and reveal that LLMs are significantly less likely than human interviewers to use acknowledgements and to pivot to higher-level questions. Realizing that a fundamental deficit exists in multi-turn planning and strategic thinking, we develop a realistic simulated environment, incorporating source personas and persuasive elements, in order to facilitate the development of agents with longer-horizon rewards. Our experiments show that while source LLMs mimic human behavior in information sharing, interviewer LLMs struggle with recognizing when questions are answered and engaging persuasively, leading to suboptimal information extraction across model size and capability. These findings underscore the need for enhancing LLMs' strategic dialogue capabilities.
Towards Principled, Practical Policy Gradient for Bandits and Tabular MDPs
May 21, 2024We consider (stochastic) softmax policy gradient (PG) methods for bandits and tabular Markov decision processes (MDPs). While the PG objective is non-concave, recent research has used the objective's smoothness and gradient domination properties to achieve convergence to an optimal policy. However, these theoretical results require setting the algorithm parameters according to unknown problem-dependent quantities (e.g. the optimal action or the true reward vector in a bandit problem). To address this issue, we borrow ideas from the optimization literature to design practical, principled PG methods in both the exact and stochastic settings. In the exact setting, we employ an Armijo line-search to set the step-size for softmax PG and empirically demonstrate a linear convergence rate. In the stochastic setting, we utilize exponentially decreasing step-sizes, and characterize the convergence rate of the resulting algorithm. We show that the proposed algorithm offers similar theoretical guarantees as the state-of-the art results, but does not require the knowledge of oracle-like quantities. For the multi-armed bandit setting, our techniques result in a theoretically-principled PG algorithm that does not require explicit exploration, the knowledge of the reward gap, the reward distributions, or the noise. Finally, we empirically compare the proposed methods to PG approaches that require oracle knowledge, and demonstrate competitive performance.
Empirical Evaluation of the Segment Anything Model (SAM) for Brain Tumor Segmentation
Oct 09, 2023
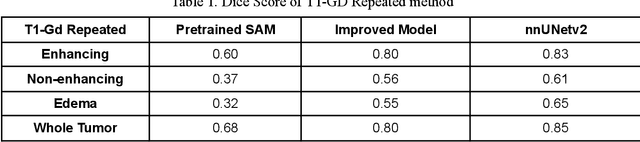

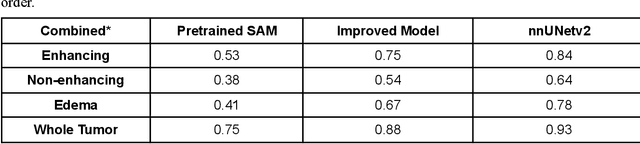
Brain tumor segmentation presents a formidable challenge in the field of Medical Image Segmentation. While deep-learning models have been useful, human expert segmentation remains the most accurate method. The recently released Segment Anything Model (SAM) has opened up the opportunity to apply foundation models to this difficult task. However, SAM was primarily trained on diverse natural images. This makes applying SAM to biomedical segmentation, such as brain tumors with less defined boundaries, challenging. In this paper, we enhanced SAM's mask decoder using transfer learning with the Decathlon brain tumor dataset. We developed three methods to encapsulate the four-dimensional data into three dimensions for SAM. An on-the-fly data augmentation approach has been used with a combination of rotations and elastic deformations to increase the size of the training dataset. Two key metrics: the Dice Similarity Coefficient (DSC) and the Hausdorff Distance 95th Percentile (HD95), have been applied to assess the performance of our segmentation models. These metrics provided valuable insights into the quality of the segmentation results. In our evaluation, we compared this improved model to two benchmarks: the pretrained SAM and the widely used model, nnUNetv2. We find that the improved SAM shows considerable improvement over the pretrained SAM, while nnUNetv2 outperformed the improved SAM in terms of overall segmentation accuracy. Nevertheless, the improved SAM demonstrated slightly more consistent results than nnUNetv2, especially on challenging cases that can lead to larger Hausdorff distances. In the future, more advanced techniques can be applied in order to further improve the performance of SAM on brain tumor segmentation.
InfraredTags: Embedding Invisible AR Markers and Barcodes Using Low-Cost, Infrared-Based 3D Printing and Imaging Tools
Feb 12, 2022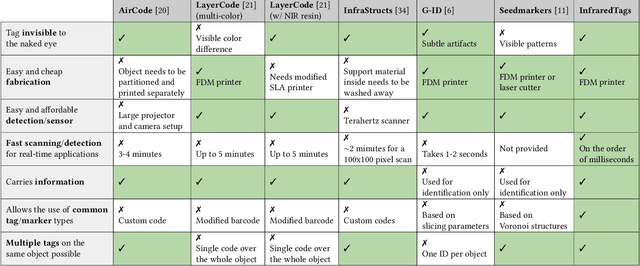
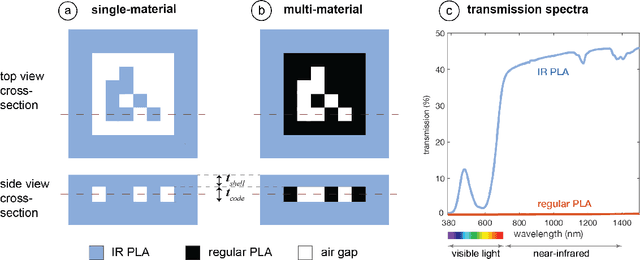
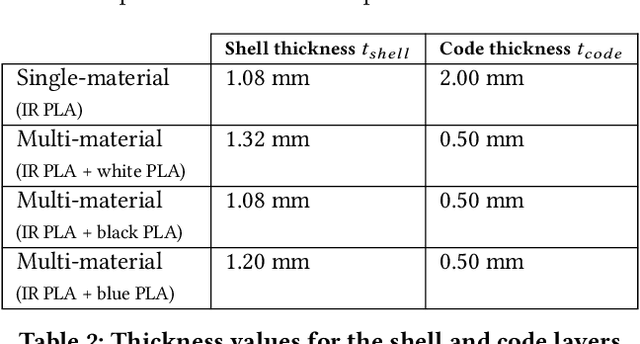
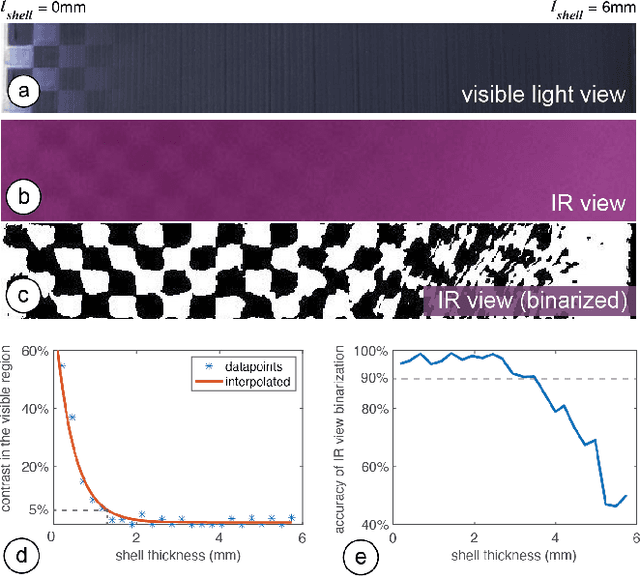
Existing approaches for embedding unobtrusive tags inside 3D objects require either complex fabrication or high-cost imaging equipment. We present InfraredTags, which are 2D markers and barcodes imperceptible to the naked eye that can be 3D printed as part of objects, and detected rapidly by low-cost near-infrared cameras. We achieve this by printing objects from an infrared-transmitting filament, which infrared cameras can see through, and by having air gaps inside for the tag's bits, which appear at a different intensity in the infrared image. We built a user interface that facilitates the integration of common tags (QR codes, ArUco markers) with the object geometry to make them 3D printable as InfraredTags. We also developed a low-cost infrared imaging module that augments existing mobile devices and decodes tags using our image processing pipeline. Our evaluation shows that the tags can be detected with little near-infrared illumination (0.2lux) and from distances as far as 250cm. We demonstrate how our method enables various applications, such as object tracking and embedding metadata for augmented reality and tangible interactions.
Real-Time Formal Verification of Autonomous Systems With An FPGA
Dec 07, 2020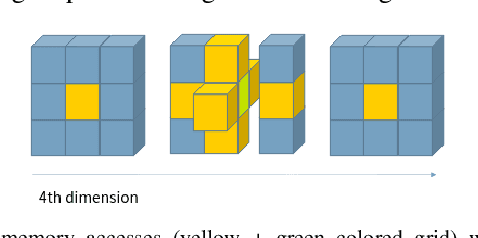
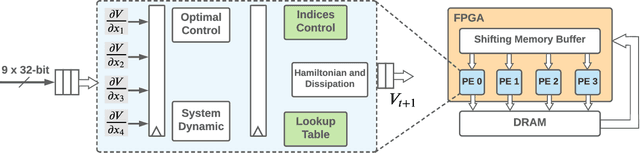

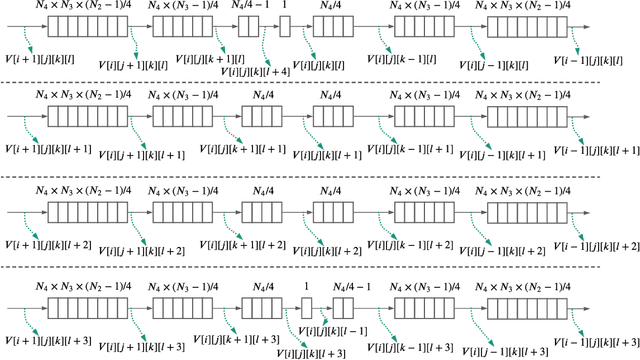
Hamilton-Jacobi reachability analysis is a powerful technique used to verify the safety of autonomous systems. This method is very good at handling non-linear system dynamics with disturbances and flexible set representations. A drawback to this approach is that it suffers from the curse of dimensionality, which prevents real-time deployment on safety-critical systems. In this paper, we show that a customized hardware design on a Field Programmable Gate Array (FPGA) could accelerate 4D grid-based Hamilton-Jacobi (HJ) reachability analysis up to 16 times compared to an optimized implementation and 142 times compared to MATLAB ToolboxLS on a 16-thread CPU. Our design can overcome the complex data access pattern while taking advantage of the parallel nature of the HJ PDE computation. Because of this, we are able to achieve real-time formal verification with a 4D car model by re-solving the HJ PDE at a frequency of 5Hz on the FPGA as the environment changes. The latency of our computation is deterministic, which is crucial for safetycritical systems. Our approach presented here can be applied to different systems dynamics, and moreover, potentially leveraged for higher dimensions systems. We also demonstrate obstacle avoidance with a robot car in a changing environment.