 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLightweight Uncertainty Quantification with Simplex Semantic Segmentation for Terrain Traversability
Jul 18, 2024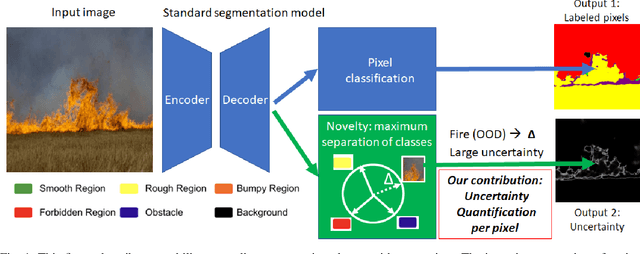
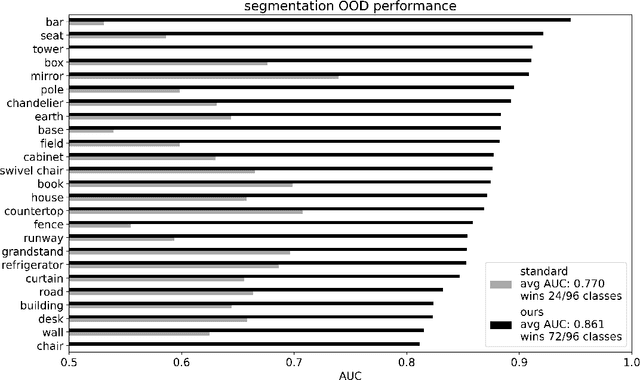
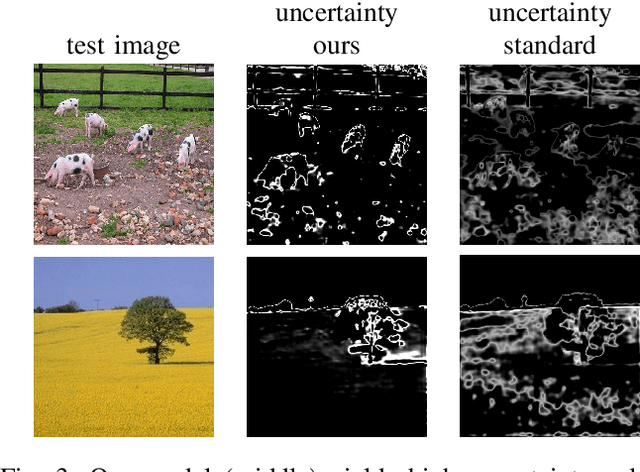
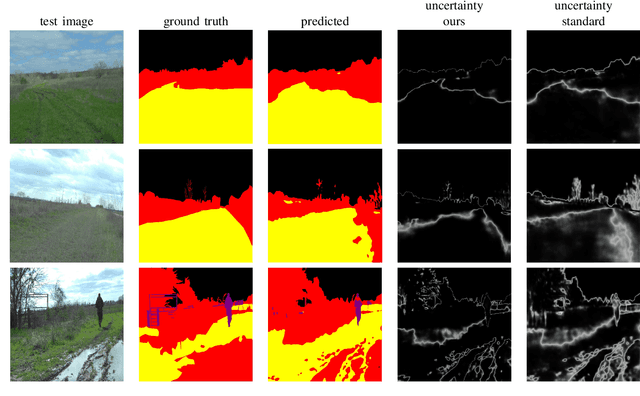
For navigation of robots, image segmentation is an important component to determining a terrain's traversability. For safe and efficient navigation, it is key to assess the uncertainty of the predicted segments. Current uncertainty estimation methods are limited to a specific choice of model architecture, are costly in terms of training time, require large memory for inference (ensembles), or involve complex model architectures (energy-based, hyperbolic, masking). In this paper, we propose a simple, light-weight module that can be connected to any pretrained image segmentation model, regardless of its architecture, with marginal additional computation cost because it reuses the model's backbone. Our module is based on maximum separation of the segmentation classes by respective prototype vectors. This optimizes the probability that out-of-distribution segments are projected in between the prototype vectors. The uncertainty value in the classification label is obtained from the distance to the nearest prototype. We demonstrate the effectiveness of our module for terrain segmentation.
* 10 pages
Synthetic-to-Real Domain Adaptation for Action Recognition: A Dataset and Baseline Performances
Mar 17, 2023
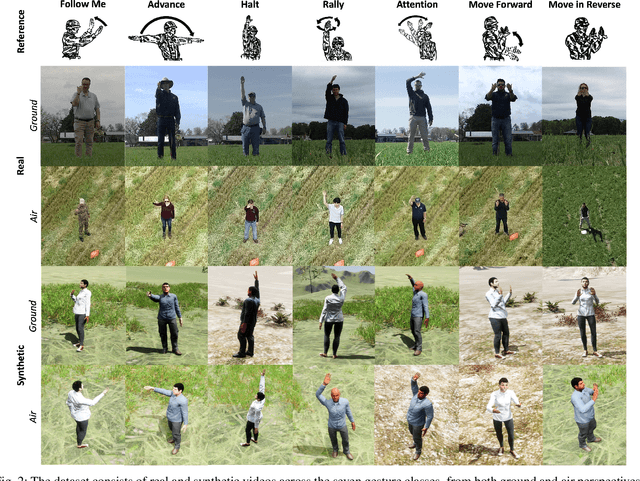
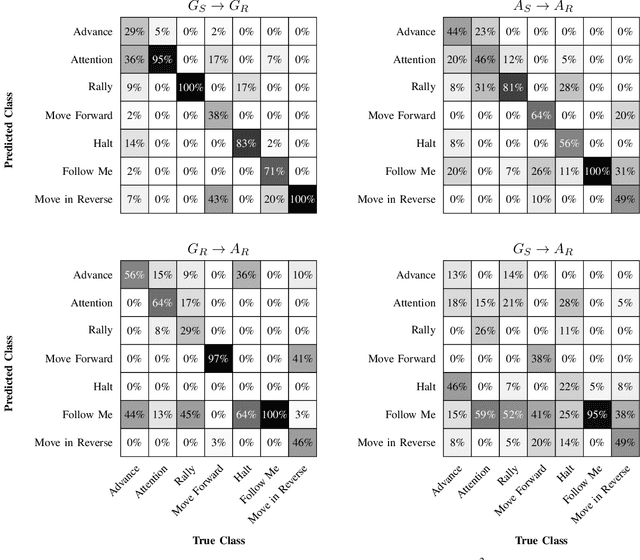
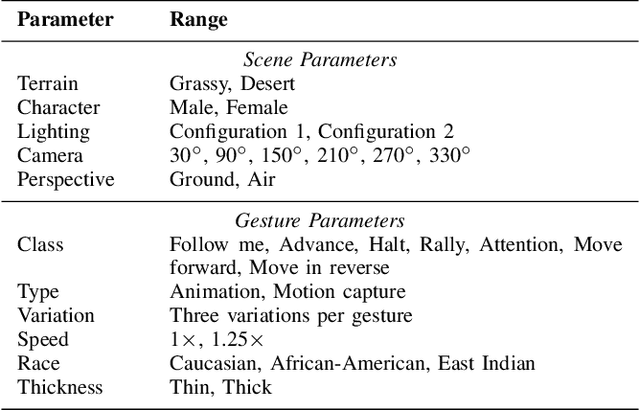
Human action recognition is a challenging problem, particularly when there is high variability in factors such as subject appearance, backgrounds and viewpoint. While deep neural networks (DNNs) have been shown to perform well on action recognition tasks, they typically require large amounts of high-quality labeled data to achieve robust performance across a variety of conditions. Synthetic data has shown promise as a way to avoid the substantial costs and potential ethical concerns associated with collecting and labeling enormous amounts of data in the real-world. However, synthetic data may differ from real data in important ways. This phenomenon, known as \textit{domain shift}, can limit the utility of synthetic data in robotics applications. To mitigate the effects of domain shift, substantial effort is being dedicated to the development of domain adaptation (DA) techniques. Yet, much remains to be understood about how best to develop these techniques. In this paper, we introduce a new dataset called Robot Control Gestures (RoCoG-v2). The dataset is composed of both real and synthetic videos from seven gesture classes, and is intended to support the study of synthetic-to-real domain shift for video-based action recognition. Our work expands upon existing datasets by focusing the action classes on gestures for human-robot teaming, as well as by enabling investigation of domain shift in both ground and aerial views. We present baseline results using state-of-the-art action recognition and domain adaptation algorithms and offer initial insight on tackling the synthetic-to-real and ground-to-air domain shifts.
Meta Arcade: A Configurable Environment Suite for Meta-Learning
Dec 01, 2021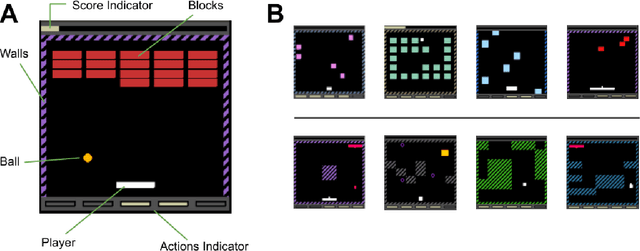
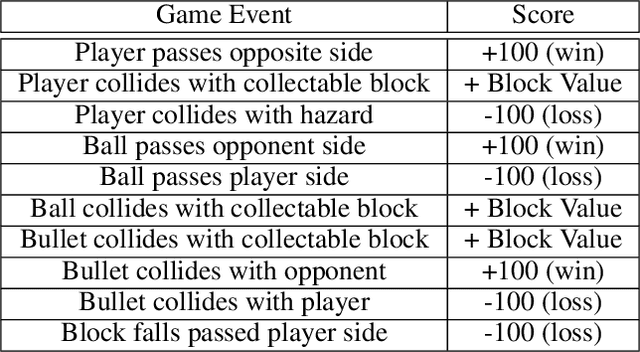
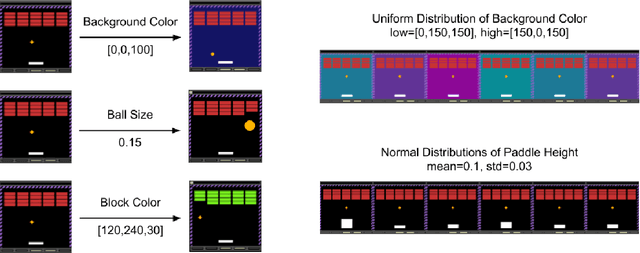
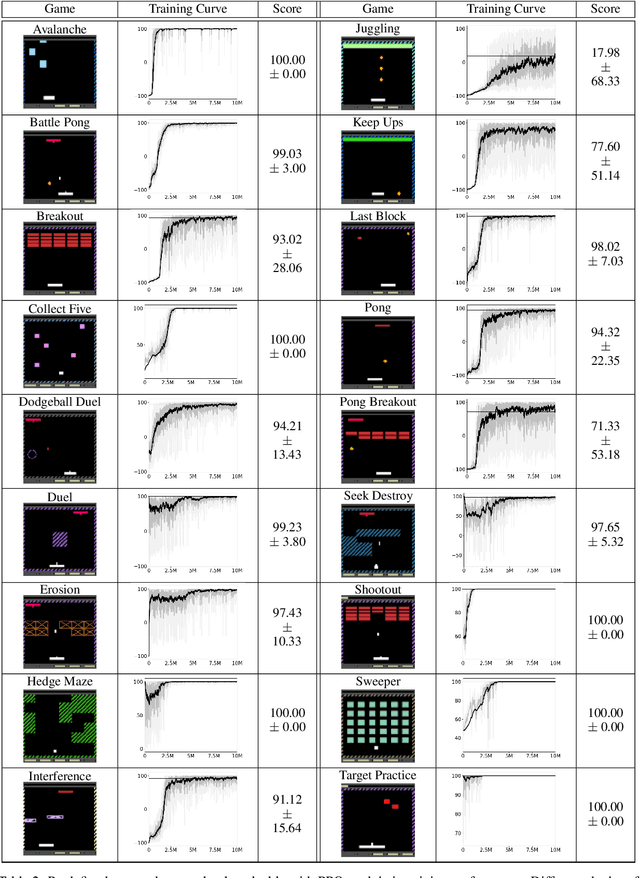
Most approaches to deep reinforcement learning (DRL) attempt to solve a single task at a time. As a result, most existing research benchmarks consist of individual games or suites of games that have common interfaces but little overlap in their perceptual features, objectives, or reward structures. To facilitate research into knowledge transfer among trained agents (e.g. via multi-task and meta-learning), more environment suites that provide configurable tasks with enough commonality to be studied collectively are needed. In this paper we present Meta Arcade, a tool to easily define and configure custom 2D arcade games that share common visuals, state spaces, action spaces, game components, and scoring mechanisms. Meta Arcade differs from prior environments in that both task commonality and configurability are prioritized: entire sets of games can be constructed from common elements, and these elements are adjustable through exposed parameters. We include a suite of 24 predefined games that collectively illustrate the possibilities of this framework and discuss how these games can be configured for research applications. We provide several experiments that illustrate how Meta Arcade could be used, including single-task benchmarks of predefined games, sample curriculum-based approaches that change game parameters over a set schedule, and an exploration of transfer learning between games.
Complex Terrain Navigation via Model Error Prediction
Nov 18, 2021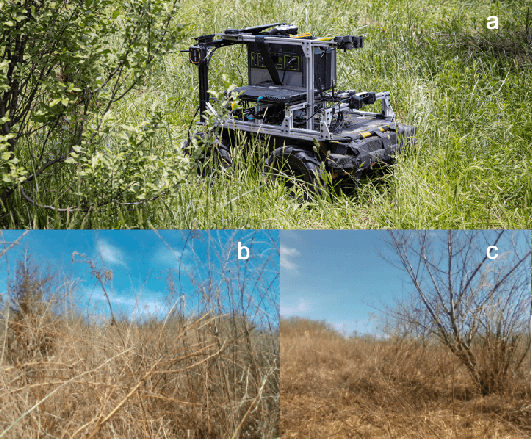
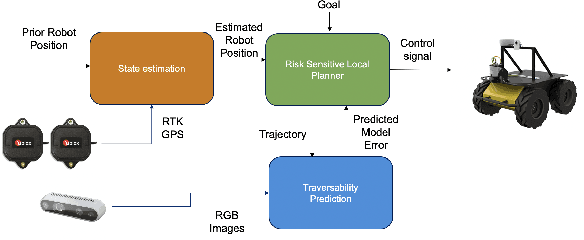
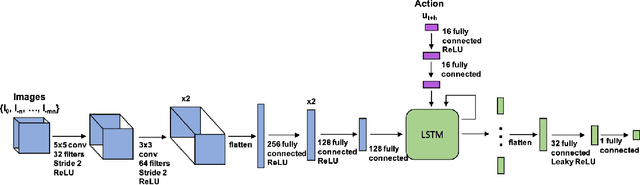
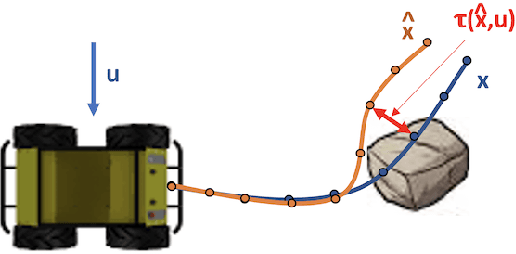
Robot navigation traditionally relies on building an explicit map that is used to plan collision-free trajectories to a desired target. In deformable, complex terrain, using geometric-based approaches can fail to find a path due to mischaracterizing deformable objects as rigid and impassable. Instead, we learn to predict an estimate of traversability of terrain regions and to prefer regions that are easier to navigate (e.g., short grass over small shrubs). Rather than predicting collisions, we instead regress on realized error compared to a canonical dynamics model. We train with an on-policy approach, resulting in successful navigation policies using as little as 50 minutes of training data split across simulation and real world. Our learning-based navigation system is a sample efficient short-term planner that we demonstrate on a Clearpath Husky navigating through a variety of terrain including grassland and forest
Out-of-Distribution Robustness with Deep Recursive Filters
Apr 06, 2021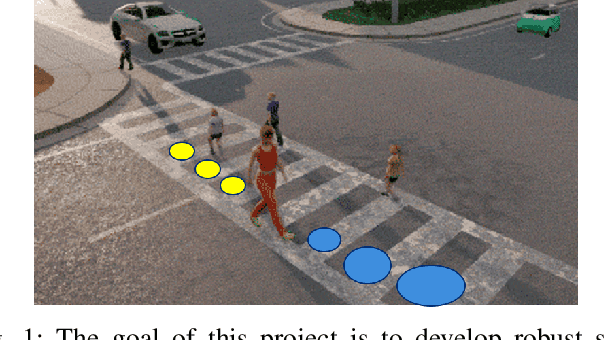
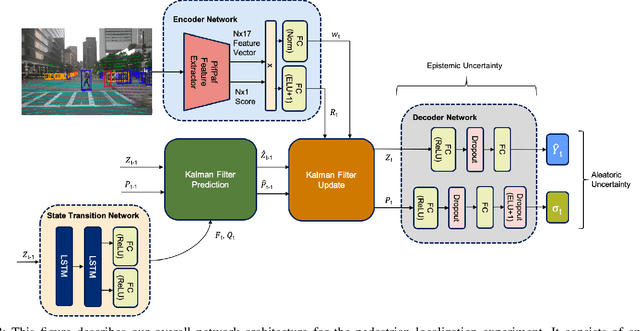
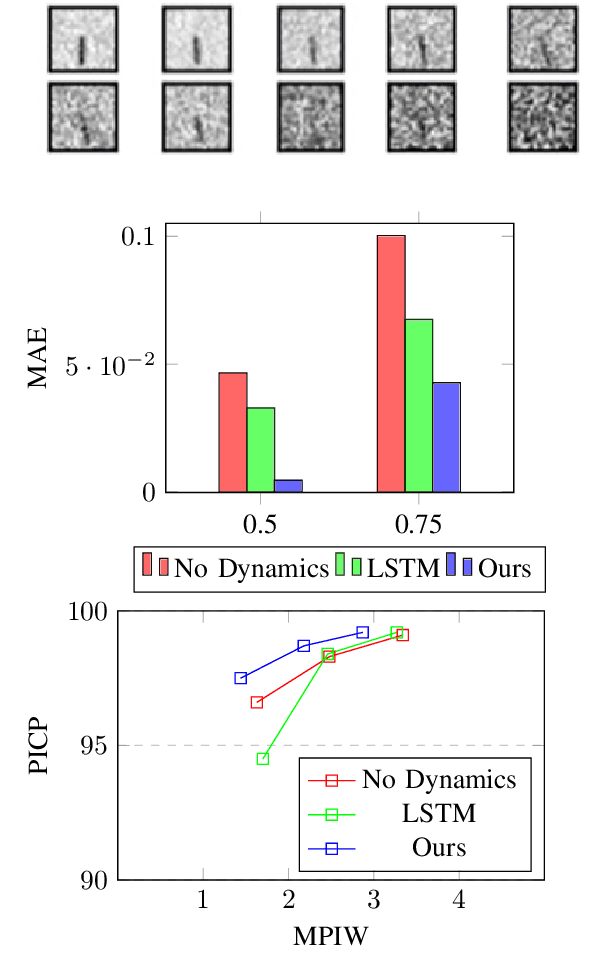
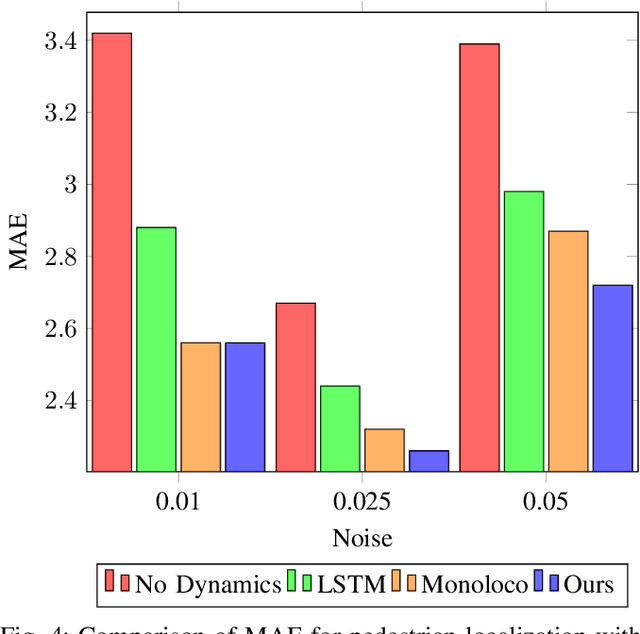
Accurate state and uncertainty estimation is imperative for mobile robots and self driving vehicles to achieve safe navigation in pedestrian rich environments. A critical component of state and uncertainty estimation for robot navigation is to perform robustly under out-of-distribution noise. Traditional methods of state estimation decouple perception and state estimation making it difficult to operate on noisy, high dimensional data. Here, we describe an approach that combines the expressiveness of deep neural networks with principled approaches to uncertainty estimation found in recursive filters. We particularly focus on techniques that provide better robustness to out-of-distribution noise and demonstrate applicability of our approach on two scenarios: a simple noisy pendulum state estimation problem and real world pedestrian localization using the nuScenes dataset. We show that our approach improves state and uncertainty estimation compared to baselines while achieving approximately 3x improvement in computational efficiency.
High-Speed Robot Navigation using Predicted Occupancy Maps
Dec 22, 2020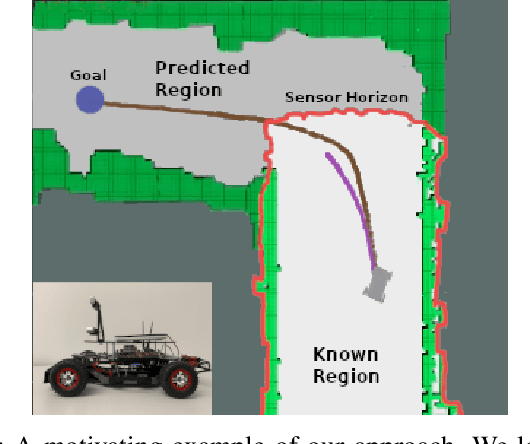
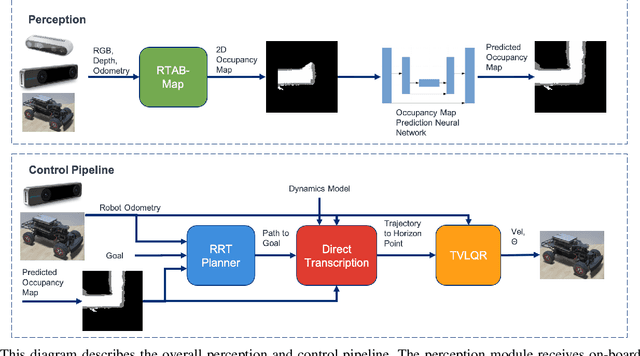
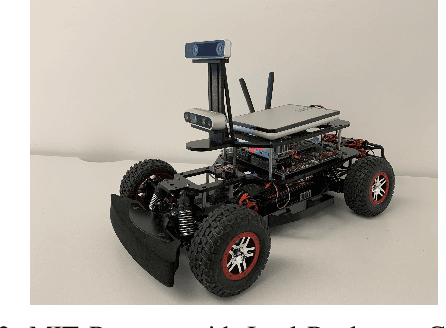
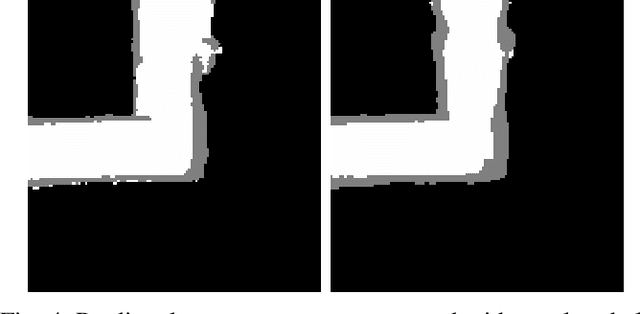
Safe and high-speed navigation is a key enabling capability for real world deployment of robotic systems. A significant limitation of existing approaches is the computational bottleneck associated with explicit mapping and the limited field of view (FOV) of existing sensor technologies. In this paper, we study algorithmic approaches that allow the robot to predict spaces extending beyond the sensor horizon for robust planning at high speeds. We accomplish this using a generative neural network trained from real-world data without requiring human annotated labels. Further, we extend our existing control algorithms to support leveraging the predicted spaces to improve collision-free planning and navigation at high speeds. Our experiments are conducted on a physical robot based on the MIT race car using an RGBD sensor where were able to demonstrate improved performance at 4 m/s compared to a controller not operating on predicted regions of the map.
PICO: Primitive Imitation for COntrol
Jun 22, 2020
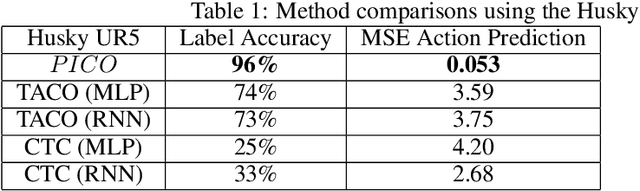
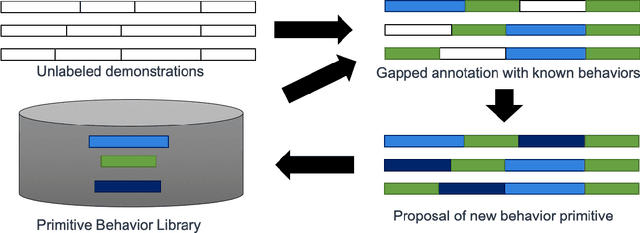
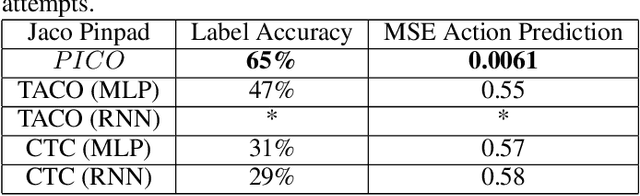
In this work, we explore a novel framework for control of complex systems called Primitive Imitation for Control PICO. The approach combines ideas from imitation learning, task decomposition, and novel task sequencing to generalize from demonstrations to new behaviors. Demonstrations are automatically decomposed into existing or missing sub-behaviors which allows the framework to identify novel behaviors while not duplicating existing behaviors. Generalization to new tasks is achieved through dynamic blending of behavior primitives. We evaluated the approach using demonstrations from two different robotic platforms. The experimental results show that PICO is able to detect the presence of a novel behavior primitive and build the missing control policy.