 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLarge Language Models are Highly Aligned with Human Ratings of Emotional Stimuli
Aug 19, 2025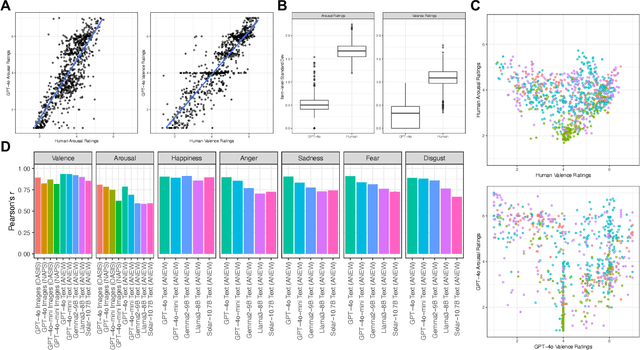
Emotions exert an immense influence over human behavior and cognition in both commonplace and high-stress tasks. Discussions of whether or how to integrate large language models (LLMs) into everyday life (e.g., acting as proxies for, or interacting with, human agents), should be informed by an understanding of how these tools evaluate emotionally loaded stimuli or situations. A model's alignment with human behavior in these cases can inform the effectiveness of LLMs for certain roles or interactions. To help build this understanding, we elicited ratings from multiple popular LLMs for datasets of words and images that were previously rated for their emotional content by humans. We found that when performing the same rating tasks, GPT-4o responded very similarly to human participants across modalities, stimuli and most rating scales (r = 0.9 or higher in many cases). However, arousal ratings were less well aligned between human and LLM raters, while happiness ratings were most highly aligned. Overall LLMs aligned better within a five-category (happiness, anger, sadness, fear, disgust) emotion framework than within a two-dimensional (arousal and valence) organization. Finally, LLM ratings were substantially more homogenous than human ratings. Together these results begin to describe how LLM agents interpret emotional stimuli and highlight similarities and differences among biological and artificial intelligence in key behavioral domains.
Backdoors in DRL: Four Environments Focusing on In-distribution Triggers
May 22, 2025



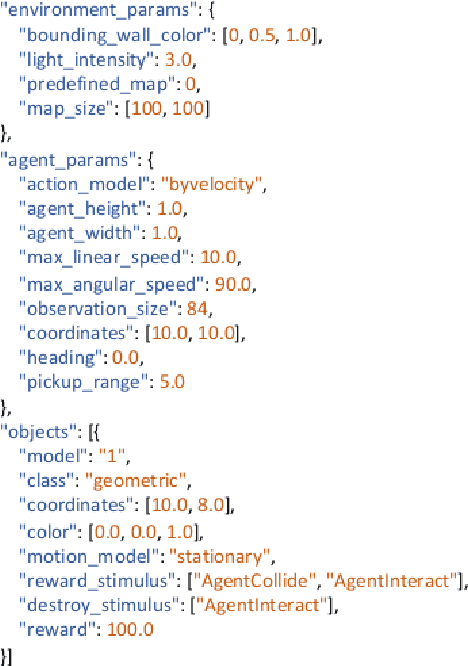
Backdoor attacks, or trojans, pose a security risk by concealing undesirable behavior in deep neural network models. Open-source neural networks are downloaded from the internet daily, possibly containing backdoors, and third-party model developers are common. To advance research on backdoor attack mitigation, we develop several trojans for deep reinforcement learning (DRL) agents. We focus on in-distribution triggers, which occur within the agent's natural data distribution, since they pose a more significant security threat than out-of-distribution triggers due to their ease of activation by the attacker during model deployment. We implement backdoor attacks in four reinforcement learning (RL) environments: LavaWorld, Randomized LavaWorld, Colorful Memory, and Modified Safety Gymnasium. We train various models, both clean and backdoored, to characterize these attacks. We find that in-distribution triggers can require additional effort to implement and be more challenging for models to learn, but are nevertheless viable threats in DRL even using basic data poisoning attacks.
Investigating the Treacherous Turn in Deep Reinforcement Learning
Apr 11, 2025


The Treacherous Turn refers to the scenario where an artificial intelligence (AI) agent subtly, and perhaps covertly, learns to perform a behavior that benefits itself but is deemed undesirable and potentially harmful to a human supervisor. During training, the agent learns to behave as expected by the human supervisor, but when deployed to perform its task, it performs an alternate behavior without the supervisor there to prevent it. Initial experiments applying DRL to an implementation of the A Link to the Past example do not produce the treacherous turn effect naturally, despite various modifications to the environment intended to produce it. However, in this work, we find the treacherous behavior to be reproducible in a DRL agent when using other trojan injection strategies. This approach deviates from the prototypical treacherous turn behavior since the behavior is explicitly trained into the agent, rather than occurring as an emergent consequence of environmental complexity or poor objective specification. Nonetheless, these experiments provide new insights into the challenges of producing agents capable of true treacherous turn behavior.
Difference Learning for Air Quality Forecasting Transport Emulation
Feb 22, 2024



Human health is negatively impacted by poor air quality including increased risk for respiratory and cardiovascular disease. Due to a recent increase in extreme air quality events, both globally and locally in the United States, finer resolution air quality forecasting guidance is needed to effectively adapt to these events. The National Oceanic and Atmospheric Administration provides air quality forecasting guidance for the Continental United States. Their air quality forecasting model is based on a 15 km spatial resolution; however, the goal is to reach a three km spatial resolution. This is currently not feasible due in part to prohibitive computational requirements for modeling the transport of chemical species. In this work, we describe a deep learning transport emulator that is able to reduce computations while maintaining skill comparable with the existing numerical model. We show how this method maintains skill in the presence of extreme air quality events, making it a potential candidate for operational use. We also explore evaluating how well this model maintains the physical properties of the modeled transport for a given set of species.
Neuro-Symbolic Bi-Directional Translation -- Deep Learning Explainability for Climate Tipping Point Research
Jun 19, 2023



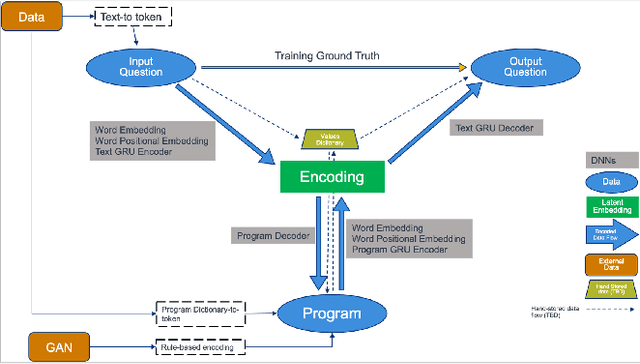
In recent years, there has been an increase in using deep learning for climate and weather modeling. Though results have been impressive, explainability and interpretability of deep learning models are still a challenge. A third wave of Artificial Intelligence (AI), which includes logic and reasoning, has been described as a way to address these issues. Neuro-symbolic AI is a key component of this integration of logic and reasoning with deep learning. In this work we propose a neuro-symbolic approach called Neuro-Symbolic Question-Answer Program Translator, or NS-QAPT, to address explainability and interpretability for deep learning climate simulation, applied to climate tipping point discovery. The NS-QAPT method includes a bidirectional encoder-decoder architecture that translates between domain-specific questions and executable programs used to direct the climate simulation, acting as a bridge between climate scientists and deep learning models. We show early compelling results of this translation method and introduce a domain-specific language and associated executable programs for a commonly known tipping point, the collapse of the Atlantic Meridional Overturning Circulation (AMOC).
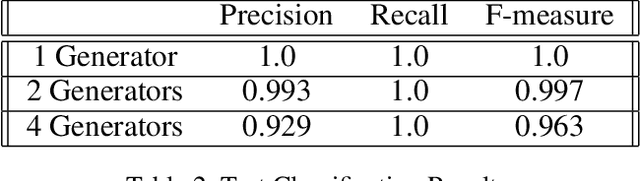
A Generative Adversarial Network for Climate Tipping Point Discovery (TIP-GAN)
Feb 16, 2023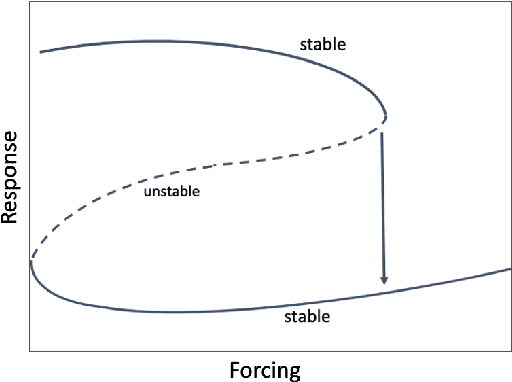
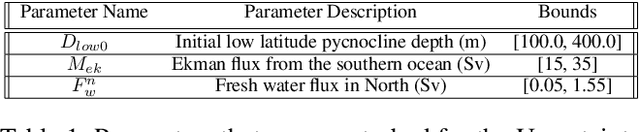
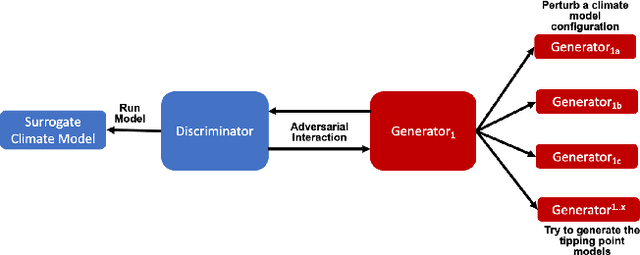
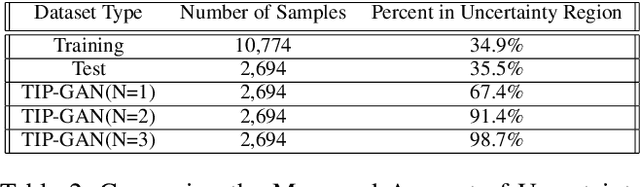
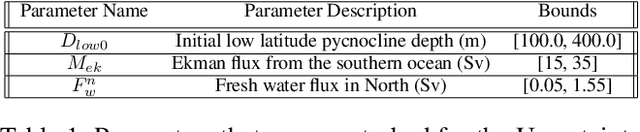
We propose a new Tipping Point Generative Adversarial Network (TIP-GAN) for better characterizing potential climate tipping points in Earth system models. We describe an adversarial game to explore the parameter space of these models, detect upcoming tipping points, and discover the drivers of tipping points. In this setup, a set of generators learn to construct model configurations that will invoke a climate tipping point. The discriminator learns to identify which generators are generating each model configuration and whether a given configuration will lead to a tipping point. The discriminator is trained using an oracle (a surrogate climate model) to test if a generated model configuration leads to a tipping point or not. We demonstrate the application of this GAN to invoke the collapse of the Atlantic Meridional Overturning Circulation (AMOC). We share experimental results of modifying the loss functions and the number of generators to exploit the area of uncertainty in model state space near a climate tipping point. In addition, we show that our trained discriminator can predict AMOC collapse with a high degree of accuracy without the use of the oracle. This approach could generalize to other tipping points, and could augment climate modeling research by directing users interested in studying tipping points to parameter sets likely to induce said tipping points in their computationally intensive climate models.
Using Artificial Intelligence to aid Scientific Discovery of Climate Tipping Points
Feb 14, 2023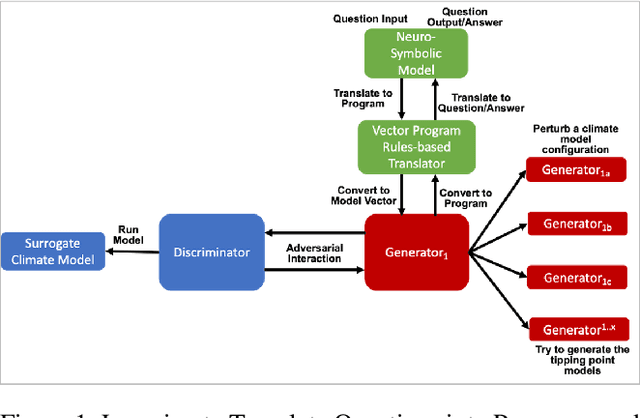
We propose a hybrid Artificial Intelligence (AI) climate modeling approach that enables climate modelers in scientific discovery using a climate-targeted simulation methodology based on a novel combination of deep neural networks and mathematical methods for modeling dynamical systems. The simulations are grounded by a neuro-symbolic language that both enables question answering of what is learned by the AI methods and provides a means of explainability. We describe how this methodology can be applied to the discovery of climate tipping points and, in particular, the collapse of the Atlantic Meridional Overturning Circulation (AMOC). We show how this methodology is able to predict AMOC collapse with a high degree of accuracy using a surrogate climate model for ocean interaction. We also show preliminary results of neuro-symbolic method performance when translating between natural language questions and symbolically learned representations. Our AI methodology shows promising early results, potentially enabling faster climate tipping point related research that would otherwise be computationally infeasible.
Context-Adaptive Deep Neural Networks via Bridge-Mode Connectivity
Nov 28, 2022
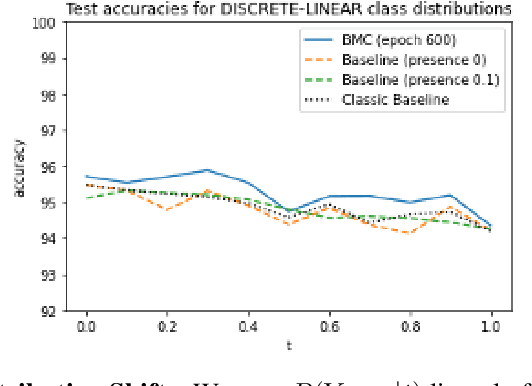
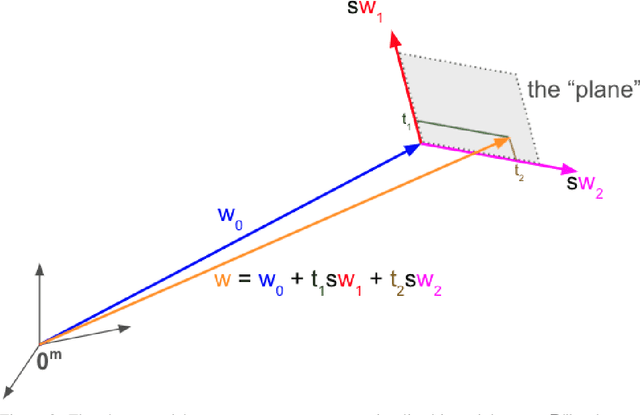

The deployment of machine learning models in safety-critical applications comes with the expectation that such models will perform well over a range of contexts (e.g., a vision model for classifying street signs should work in rural, city, and highway settings under varying lighting/weather conditions). However, these one-size-fits-all models are typically optimized for average case performance, encouraging them to achieve high performance in nominal conditions but exposing them to unexpected behavior in challenging or rare contexts. To address this concern, we develop a new method for training context-dependent models. We extend Bridge-Mode Connectivity (BMC) (Garipov et al., 2018) to train an infinite ensemble of models over a continuous measure of context such that we can sample model parameters specifically tuned to the corresponding evaluation context. We explore the definition of context in image classification tasks through multiple lenses including changes in the risk profile, long-tail image statistics/appearance, and context-dependent distribution shift. We develop novel extensions of the BMC optimization for each of these cases and our experiments demonstrate that model performance can be successfully tuned to context in each scenario.
Latent Properties of Lifelong Learning Systems
Jul 28, 2022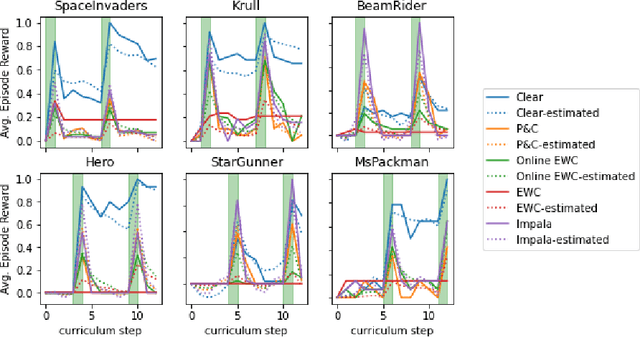
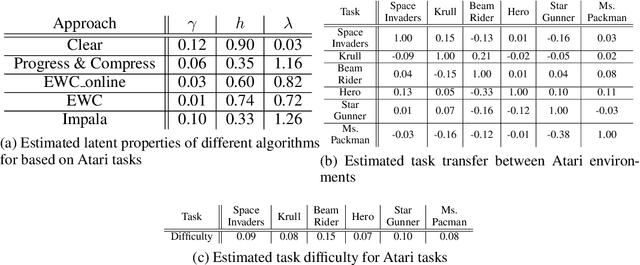
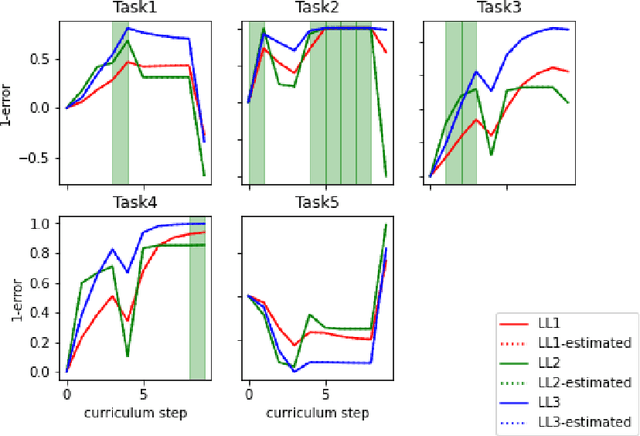
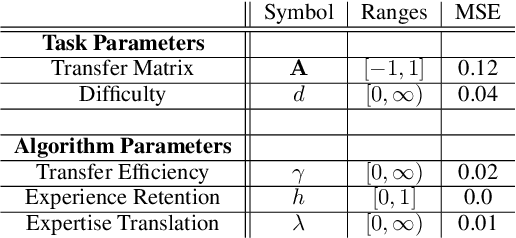
Creating artificial intelligence (AI) systems capable of demonstrating lifelong learning is a fundamental challenge, and many approaches and metrics have been proposed to analyze algorithmic properties. However, for existing lifelong learning metrics, algorithmic contributions are confounded by task and scenario structure. To mitigate this issue, we introduce an algorithm-agnostic explainable surrogate-modeling approach to estimate latent properties of lifelong learning algorithms. We validate the approach for estimating these properties via experiments on synthetic data. To validate the structure of the surrogate model, we analyze real performance data from a collection of popular lifelong learning approaches and baselines adapted for lifelong classification and lifelong reinforcement learning.
L2Explorer: A Lifelong Reinforcement Learning Assessment Environment
Mar 14, 2022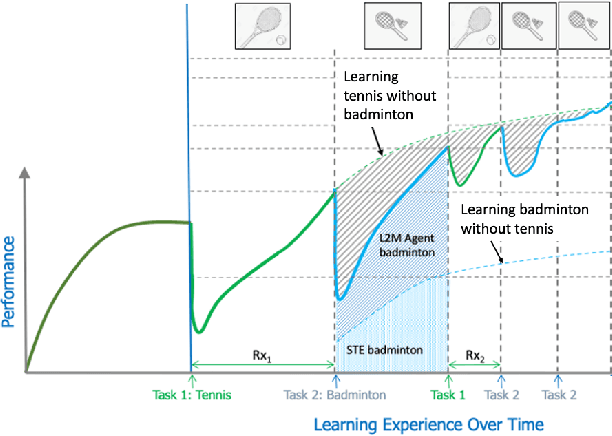


Despite groundbreaking progress in reinforcement learning for robotics, gameplay, and other complex domains, major challenges remain in applying reinforcement learning to the evolving, open-world problems often found in critical application spaces. Reinforcement learning solutions tend to generalize poorly when exposed to new tasks outside of the data distribution they are trained on, prompting an interest in continual learning algorithms. In tandem with research on continual learning algorithms, there is a need for challenge environments, carefully designed experiments, and metrics to assess research progress. We address the latter need by introducing a framework for continual reinforcement-learning development and assessment using Lifelong Learning Explorer (L2Explorer), a new, Unity-based, first-person 3D exploration environment that can be continuously reconfigured to generate a range of tasks and task variants structured into complex and evolving evaluation curricula. In contrast to procedurally generated worlds with randomized components, we have developed a systematic approach to defining curricula in response to controlled changes with accompanying metrics to assess transfer, performance recovery, and data efficiency. Taken together, the L2Explorer environment and evaluation approach provides a framework for developing future evaluation methodologies in open-world settings and rigorously evaluating approaches to lifelong learning.