 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLongComp: Long-Tail Compositional Zero-Shot Generalization for Robust Trajectory Prediction
Nov 13, 2025Methods for trajectory prediction in Autonomous Driving must contend with rare, safety-critical scenarios that make reliance on real-world data collection alone infeasible. To assess robustness under such conditions, we propose new long-tail evaluation settings that repartition datasets to create challenging out-of-distribution (OOD) test sets. We first introduce a safety-informed scenario factorization framework, which disentangles scenarios into discrete ego and social contexts. Building on analogies to compositional zero-shot image-labeling in Computer Vision, we then hold out novel context combinations to construct challenging closed-world and open-world settings. This process induces OOD performance gaps in future motion prediction of 5.0% and 14.7% in closed-world and open-world settings, respectively, relative to in-distribution performance for a state-of-the-art baseline. To improve generalization, we extend task-modular gating networks to operate within trajectory prediction models, and develop an auxiliary, difficulty-prediction head to refine internal representations. Our strategies jointly reduce the OOD performance gaps to 2.8% and 11.5% in the two settings, respectively, while still improving in-distribution performance.
SEAL: Towards Safe Autonomous Driving via Skill-Enabled Adversary Learning for Closed-Loop Scenario Generation
Sep 16, 2024



Verification and validation of autonomous driving (AD) systems and components is of increasing importance, as such technology increases in real-world prevalence. Safety-critical scenario generation is a key approach to robustify AD policies through closed-loop training. However, existing approaches for scenario generation rely on simplistic objectives, resulting in overly-aggressive or non-reactive adversarial behaviors. To generate diverse adversarial yet realistic scenarios, we propose SEAL, a scenario perturbation approach which leverages learned scoring functions and adversarial, human-like skills. SEAL-perturbed scenarios are more realistic than SOTA baselines, leading to improved ego task success across real-world, in-distribution, and out-of-distribution scenarios, of more than 20%. To facilitate future research, we release our code and tools: https://github.com/cmubig/SEAL
SafeShift: Safety-Informed Distribution Shifts for Robust Trajectory Prediction in Autonomous Driving
Sep 16, 2023As autonomous driving technology matures, safety and robustness of its key components, including trajectory prediction, is vital. Though real-world datasets, such as Waymo Open Motion, provide realistic recorded scenarios for model development, they often lack truly safety-critical situations. Rather than utilizing unrealistic simulation or dangerous real-world testing, we instead propose a framework to characterize such datasets and find hidden safety-relevant scenarios within. Our approach expands the spectrum of safety-relevance, allowing us to study trajectory prediction models under a safety-informed, distribution shift setting. We contribute a generalized scenario characterization method, a novel scoring scheme to find subtly-avoided risky scenarios, and an evaluation of trajectory prediction models in this setting. We further contribute a remediation strategy, achieving a 10% average reduction in prediction collision rates. To facilitate future research, we release our code to the public: github.com/cmubig/SafeShift
T2FPV: Constructing High-Fidelity First-Person View Datasets From Real-World Pedestrian Trajectories
Sep 22, 2022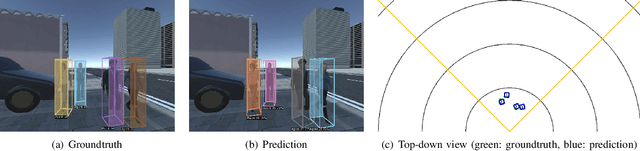
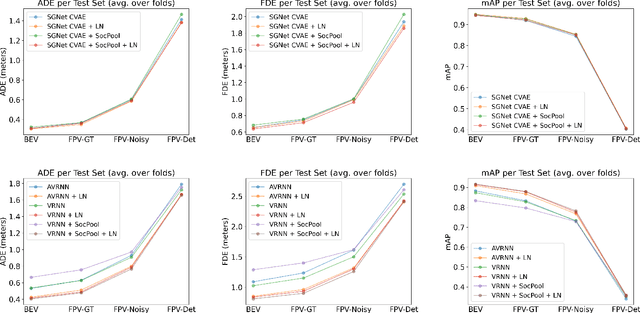
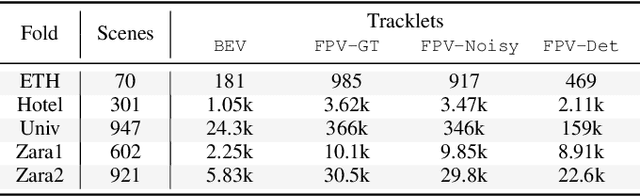
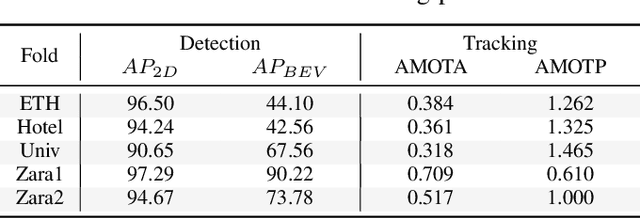
Predicting pedestrian motion is essential for developing socially-aware robots that interact in a crowded environment. While the natural visual perspective for a social interaction setting is an egocentric view, the majority of existing work in trajectory prediction has been investigated purely in the top-down trajectory space. To support first-person view trajectory prediction research, we present T2FPV, a method for constructing high-fidelity first-person view datasets given a real-world, top-down trajectory dataset; we showcase our approach on the ETH/UCY pedestrian dataset to generate the egocentric visual data of all interacting pedestrians. We report that the bird's-eye view assumption used in the original ETH/UCY dataset, i.e., an agent can observe everyone in the scene with perfect information, does not hold in the first-person views; only a fraction of agents are fully visible during each 20-timestep scene used commonly in existing work. We evaluate existing trajectory prediction approaches under varying levels of realistic perception -- displacement errors suffer a 356% increase compared to the top-down, perfect information setting. To promote research in first-person view trajectory prediction, we release our T2FPV-ETH dataset and software tools.
Structural Similarity for Improved Transfer in Reinforcement Learning
Jul 27, 2022
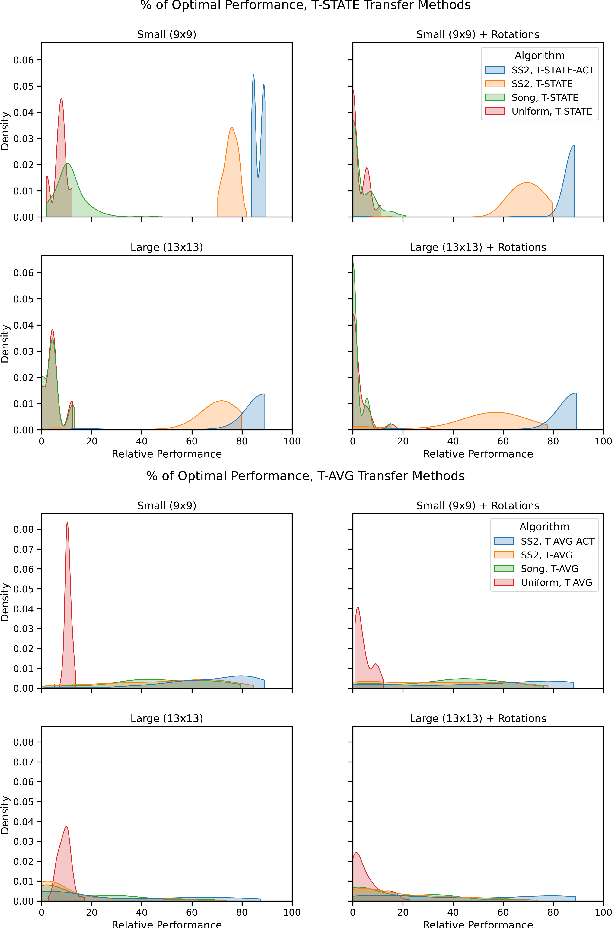
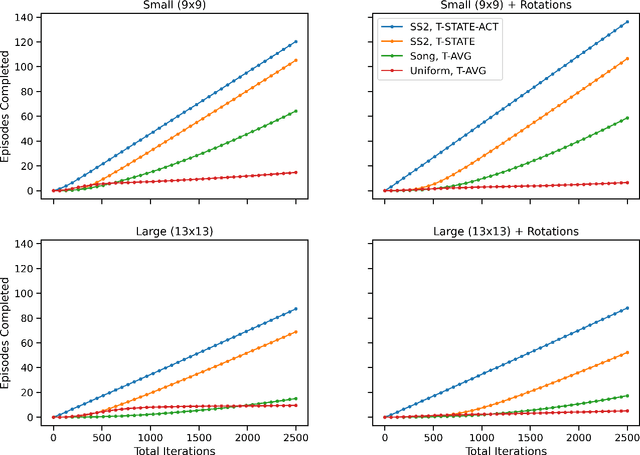
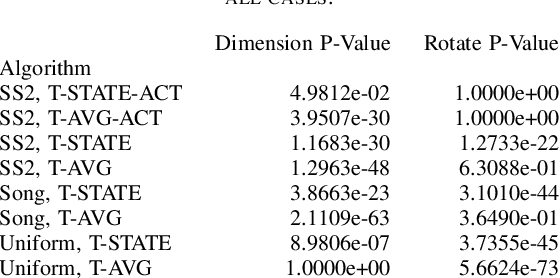
Transfer learning is an increasingly common approach for developing performant RL agents. However, it is not well understood how to define the relationship between the source and target tasks, and how this relationship contributes to successful transfer. We present an algorithm called Structural Similarity for Two MDPS, or SS2, that calculates a state similarity measure for states in two finite MDPs based on previously developed bisimulation metrics, and show that the measure satisfies properties of a distance metric. Then, through empirical results with GridWorld navigation tasks, we provide evidence that the distance measure can be used to improve transfer performance for Q-Learning agents over previous implementations.
Meta Arcade: A Configurable Environment Suite for Meta-Learning
Dec 01, 2021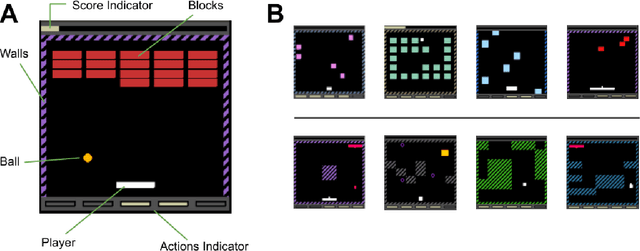
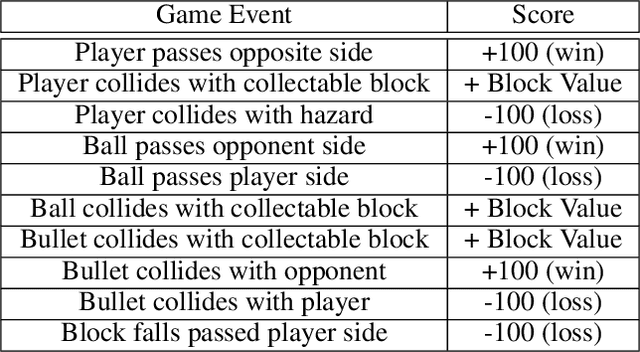
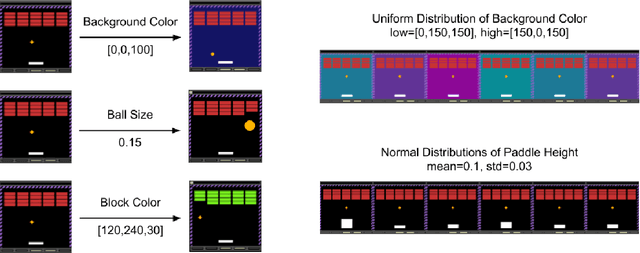
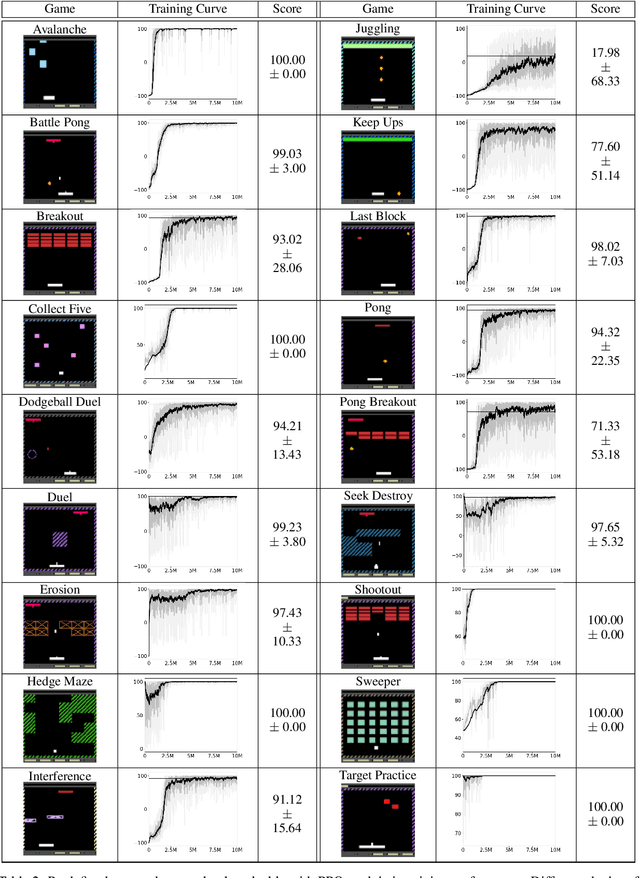
Most approaches to deep reinforcement learning (DRL) attempt to solve a single task at a time. As a result, most existing research benchmarks consist of individual games or suites of games that have common interfaces but little overlap in their perceptual features, objectives, or reward structures. To facilitate research into knowledge transfer among trained agents (e.g. via multi-task and meta-learning), more environment suites that provide configurable tasks with enough commonality to be studied collectively are needed. In this paper we present Meta Arcade, a tool to easily define and configure custom 2D arcade games that share common visuals, state spaces, action spaces, game components, and scoring mechanisms. Meta Arcade differs from prior environments in that both task commonality and configurability are prioritized: entire sets of games can be constructed from common elements, and these elements are adjustable through exposed parameters. We include a suite of 24 predefined games that collectively illustrate the possibilities of this framework and discuss how these games can be configured for research applications. We provide several experiments that illustrate how Meta Arcade could be used, including single-task benchmarks of predefined games, sample curriculum-based approaches that change game parameters over a set schedule, and an exploration of transfer learning between games.